1
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического управления и дистанционной передачи позиционной информации.
Известен датчик скорости вращения, содержащий дифференцирующие звенья, вращающийся трансформатор, фазовые детекторы, фильтры нижних частот, дискриминаторы и выпрямители 1.
Основным недостатком его является ограниченный диапазон.
Из известных устройств наиболее близким к изобретению по технической сущности является датчик скорости вращения, содержащий сельсин, три фазовых детектора, выходы которых соединены соответственно с входами трех фильтров нижних частот, дифференциатор, выход которого связан через схему выделения модуля с входом выходного фильтра нижних частот, управляющие входы фазовых детекторов подключены к выходу источника опорного напряжения, дешифратор, три компаратора и три ключа, аналоговые входы которых соединены с соответствующими выходами фильтров нижних частот, которые в сочетании из трех по два соединены с соответствующими входами трех компараторов, выходы компараторов соединены с соответствующими входами дещифратора, каждый из трех выходов которого соединен с управляющим входом одного из соответствующих ключей, выходы которых соединены
5 с входом дифференциатора, причем выходные концы трех фазовых обмоток сельсина подключены к входам соответствующих фазовых детекторов в том же сочетании 2.
10 В основу работы датчика положен принцип определения производной линейной части огибающей, в общем случае пропорциональной синус} угла поворота. Недостатками такого датчика являются
15 ошибка определения скорости вращения вала, обусловленная недостаточной точностью определения границ участков линейнонарастающего и линейно-подающего напряжений, и сравнительная сложность.
20 Целью изобретения является увеличение точности измерения скорости вращения вала за счет уменьшения ошибки определения границ участков линейно-нарастающего и линейно-падающего напряжений при
25 зпрощении устройства.
Это достигается тем, что в известное устройство, содержащее сельсин, подключенный к источнику опорного напряжения, три компаратора, выходы которых соединены с
30 соответствующими входами дешифратора,
выход которого подключен к управляющему входу электронных ключей, фазовый детектор, управляющнй вход которого подключен к выходу источника опорного напряження, а выход соединен с входом фильтра нижней частоты, дифференциатор, выход которого связан через схему выделения модуля с входом выходного фильтра нижней частоты, введен блок нагрузки, входы которого подключены к выходам фазных обмоток сельсина, которые подключены также к аналоговым входам электронных ключей и попарно подключены ко входам компараторов, выходы электронных ключей подключены к аналоговым входам фазового детектора, выход фильтра нижней частоты соединен с входом дифференциатора.
Такое построение датчика позволило повысить точность измерения скорости вращения и упростить аппаратурную реализацию, что достигается уменьшением ошибки фиксации границ участков линейно-нарастаюшего напряжений за счет исключения погрешностей, вносимых процессами демодулирования и фильтрации. Определение границ участков напряжений обеспечивается за счет непосредственного сравнения (в сочетании из трех по два) фазных напряжений сельсина на трех компараторах с последуюндш дешифрированием результата. С целью уменьшения объема аппаратуры обеспечивается коммутация из трех по два непосредственно фазных напряжений сельсина для последуюш,ей демодуляции и фильтрования. Последнее позволяет также устранить погрешность, обусловленную разбросом характеристик фазовых детекторов и фильтров нижней частоты. С целью обеспечения симметрии фазных напряжеНИИ применен блок нагрузки, позволяющий стабилизировать работу датчика в разнообразных условиях эксплуатации.
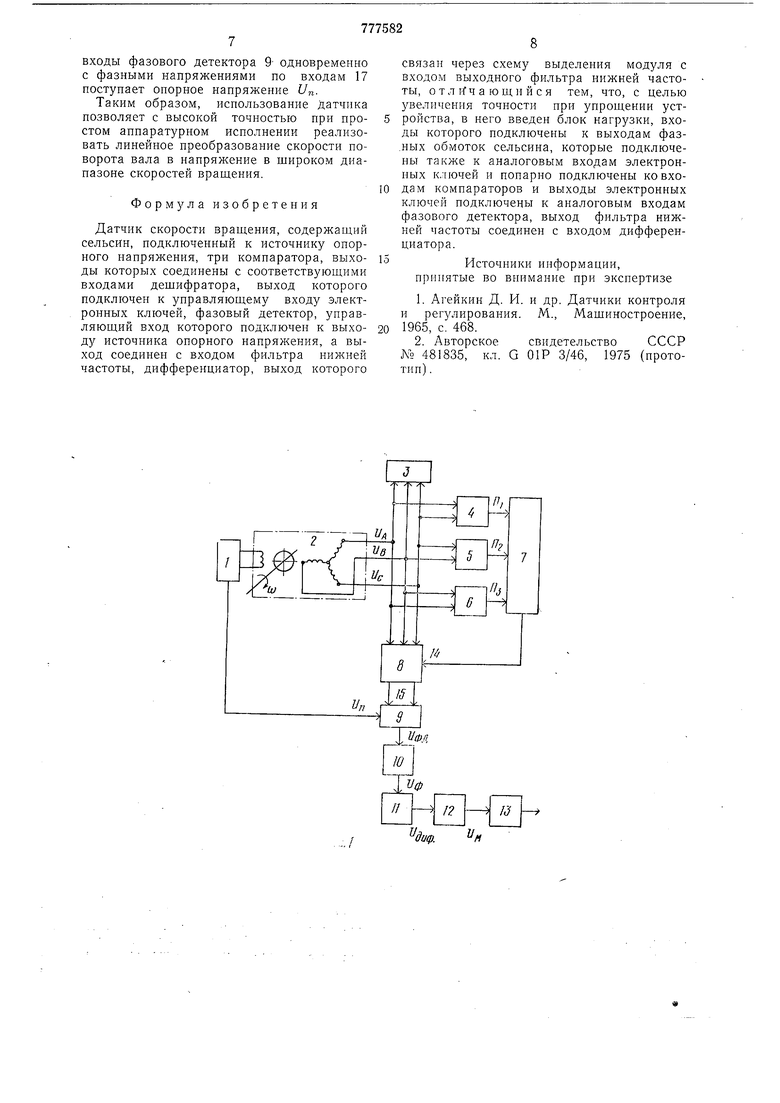
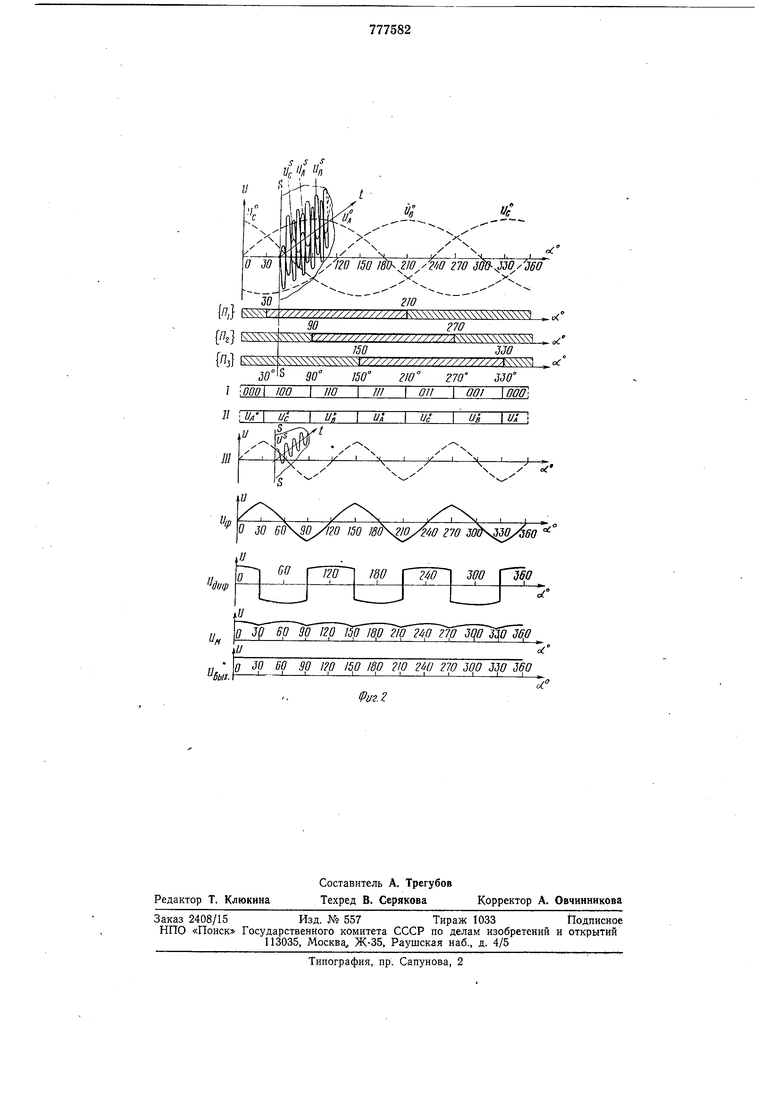
На фиг. 1 дана структурная схема датчика; на фиг. 2 - диаграммы, поясняющие его работу.
Датчик скоростей вращения состоит из источника 1 опорного напряжения, сельсина 2, блока 3 нагрузки, трех компараторов 4, 5 и 6, дешифратора 7, электронных ключей 8, фазового детектора 9, фильтра 10 нижней частоты, дифференциатора 11, схемы 12 выделения модуля и выходного фильтра 13 нижней частоты.
На фиг. 2 и°А, и°в, /°с - огибающие трех фазных напряжений; UA, t/в и f/c сельсина 2 (показаны условно пунктиром); а - угол поворота вала (ротора сельсина 2).
{Ill}, {П2), {Пз}-области существования последовательностей Пь Uz и Пз импульсов на выходе компараторов 4, 5 и 6 соответственно (заштрихован вправо-вверх и вправо-вниз) при сравнении мгновенных значений напряжений UA, Us и Uc попарно между собой. Направление штриховки показывает факт совпадения (вправовврех) и несовпадения (вправо-вниз) по фазе с напряжением Ип источника 1 опорного напряжения. 5 - плоскость сечения (развертка по времени) в окрестностях угла , для которой показаны (условно под углом 45° фазные напряжения UA, и в и и с, соответствующие углу , т. е. , , соответственно.
Двойное развертывание по оси t тл а, принято в целях уменьшения загромождения чертежа, при этом a,(t)-закон изменения угла во времени.
I- коды с выхода дешифратора, управляющие коммутацией электронных ключей 8 по входу 14 (в частности, в диапазонах а 0ч-30° -код 000; а ЗО- 90° -код 100 и т: д.).
II- напряжения фазового детектора 9:
(в + /с),
представлены соответственными отрицательными суммами фазных напряжений УА, UB и Uc;
UC -(UA + US),
по выходу 15;
(UC + UA)
в диапазонах а 0- 30°-U A, a 30- - 9Q°-U c и т. д.
П1 -огибающие линейно-нарастающих и линейно-падающих напряжений И (напряжения не показаны непосредственно, только для сечения 5-1/ пунктиром изображены огибающие);
иф-линейно-нарастающие и линейнопадающие напряжения на выходе фазового детектора 9; Уд„ф - напряжение, пропорциональное скорости вращения на выходе дифференциатора 11; t/м - напряжение на выходе схемы 12 выделения модуля; t/вых - напряжение на выходе выходного фильтра 13 нижней частоты.
Датчик скорости вращения работает следующим образом.
Напряжения, снимаемые с фазных обмоток сельсина 2, в зависимости от угла поворота а° изменяются по косинусоидальномузакону. Данные напряжения являются переменными с частотой напряжения источника 1 онорного напряжения, модулированные по амплитуде по косинусоидальному (или синусоидальному, в зависимости от выбора начала отсчета) закону угла поворота вала (вращающегося объекта). Изза, пространственного сдвига обмоток синхронизации сельсина 2 (120°) соответственно и закон модуляции в каждой фазе имеет один и тот же характер, но со сдвигом в 120° градусов:
и л Ки„ sin я; ав /С /„81п(а-120°); f/c f/«Sln(a+120°);
где Un - напряжение истоочннка 1, « -f /nSino);
со - частота напряжения Un,
К - коэффициент передачи.
Фазовые напряжения постунают в соответствующих сочетаниях на входы компараторов 4, 5 и 6, блок 3 нагрузки и аналоговые входы электронных ключей 8. В компараторах 4, 5 и 6 нанряжения f/A, UB и Uc сравниваются попарно между собой. Сравнение пар осуо ествляется параллельно во времени. Попарно между собой сравниваются мгновенные значения напряжений фаз А, В и С, т. е. одновременно сравниваются три пары напряжений:
и А С Uc, Uc с Us и UB с UA.
Формирование имнульсных последовательностей П|, ГТ2 и ГТз рассмотрено на примере сравнения напряжений фаз В и С на компараторе 5. Мгновенные значения напряжения фаз В и С равны:
с sin соЛ sin (а + 120°); UB - Ки,„ sin сог - sin (а - 120°).
Значения t/c и Un зависят от и а°: Uc F(i,
UB F(t,°.
При этом (0-закон движения во времени вращающегося вала. В конечном итоге
Uc Ф, 1 /(01 и f/5 Ф, f, (f}
- функциональные зависимости от времени.
Отсюда следует, что Uc и f/в относительно Un могут совпадать но фазе или быть противоположными и только на j rлах ai 90° и «2 270°, UC UR, и разность
8 гУс - t/B 0.
При изменении угла а от 90 до 270° импульсная последовате.льность (П2) не меняет свою фазу на противоположную, только в момент прохождения угла а 270° амплитуда их убывает до нуля и фаза меняется на противоположную (за счет ограничения снизу отрицательные импульсы подавляются). При изменении угла а от 270 до 360° (а также в интервале ) фаза импульсной послеловательности П2 противоположна Ur,. Таким образом, по смене фазы импульсной последовательности По точно можно определить границы интервала 90-т-270°, формирование импульсных последовательностей на компараторах 4 и 6 (П1 и Пз) происходит аналогично. Взаимные сочетания Пь П2 и Пз представлены на фиг. 2.
Дешифратор 7 управляет коммутацией напряжений UA, UB и Uc электронными ключами 8.
В частности, в интервалах Оч-30 150ч4-210° н обеспечивается коммутация фаз В и С, что дает UB- UCДанное управление легко реализуется дешифратором 7 в зависимости от сочетания фаз последовательностей Пь П2 и Пз по следующей логике:
- фазы Пь П2 и Пз совпадают (по
отнощению к Un равны на углах
и противоположны на углах Оч-30° и 330- 360°);
и
фазы П2 и Пз равны и противоположны Пь
и в-фазы П; и П2 равны и противоположны Пз.
Блок 3 нагрузки обеспечивает симметрию фаз /4, В и С с целью исключения различных искажений и влияния помех. Фазовый детектор 9 преобразует участки линейно-нарастающего и линейно-падающего напряжений фаз в пилообразное напряжение (см. 7ф на фиг. 2). Актнвиый фильтр 10 нижней частоты осун1.ествляет сглаживание напряжения. Напряжение,
пропорциональное скорости изменения угла новорота вала (со) вырабатывается дифференциатором 11 (см. f/лпф на фиг. 2). Схема 12 выделения модуля используется для преобразования биполярного напряжеПИЯ, поступающего с дифференциатора 11 в постоянное напряжение олной полярности (см. f/M на фиг. 2). Схема 12 выделения модуля может быть реализоваиа как двухполупериодный выпрямитель.
Выходной фильтр 13 нижней частоты устраняет пульсации схемы 12 выделения модуля. Таким образом, пилообразное нанряжение (Аункция синуса практически с точностью 2% линейна в интерва.ле aprvмента Оч-30°) после дифференциатора И нредставляет собой относительно прямоугольные импульсы нанряження положительной и отрицательной полярностей (см. Г/-1„Ф на фпг. 2), соответствующие наклону
пилообразного напряжения, что эквивалентно скорости изменения угла. Ппямоуго.ггьное напряжение, завал вертины КОТОРОГО определяется приведенной вьппе нелинейностью, с выхода дифференциатора
II поступает на схему 12 выделения МОДУЛЯ, на выходе которой образуется постоянное напряжение, модуль которого пропорттионален изменению угла поворота вала. Затем это напряжение поступает на выхолиой фильтр 13 нижней частоты, на выходе которого Формируется постоянный уровень напряжетптя, свободный от пульсаттий выхода схемы 12 выделения модуля (см. С/вых на фиг. 2). Для формирования пилообразного напряжения на зшравляющие
входы фазового детектора 9 одновременно с фазными напряжениямн по входам 17 постунает онорное напряжение Un.
Таким образом, иснользование Датчика позволяет с высокой точностью при простом аппаратурном исполнении реализовать линейное преобразование скорости поворота вала в напряжение в широком диапазоне скоростей вращения.
Формула изобретения
Датчик скорости вращения, содержащий сельсин, подключенный к источнику опорного напряжения, три компаратора, выходы которых соединены с соответствующими входами дешифратора, выход которого подключен к управляющему входу электронных ключей, фазовый детектор, управляющий вход которого подключен к выходу источника опорного напряжения, а выход соединен с входом фильтра нижней частоты, дифференциатор, выход которого
связан через схему выделения модуля с входом выходного фильтра нижней частоты, от л ич а ю пхи и с я тем, что, с целью Звеличеиия точности при упрощении устройства, в него введен блок нагрузки, входы которого подключены к выходам фаз.ных обмоток сельсина, которые подключены также к аналоговым входам электронных ключей и попарно подключены ко входам компараторов и выходы электронных ключей подключены к аналоговым входам фазового детектора, выход фильтра нижней частоты соединен с входом дифференциатора.
Источники информации, принятые во внимание при экспертизе
1.Агейкин Д. И. и др. Датчики контроля и регулирования. М., Мащиностроение,
1965, с. 468.
2.Авторское свидетельство СССР А 481835, кл. G OIP 3/46, 1975 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик скорости вращения | 1973 |
|
SU481835A1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU661589A1 |
| Способ преобразования угла поворота вала в цифровой код | 1977 |
|
SU720451A1 |
| Преобразователь угла поворота вала в код | 1975 |
|
SU526933A1 |
| ТРЕХФАЗНЫЙ АКТИВНЫЙ ВЫПРЯМИТЕЛЬ НАПРЯЖЕНИЯ ДЛЯ СЕТЕЙ С НЕСИММЕТРИЧНЫМ НАПРЯЖЕНИЕМ | 2023 |
|
RU2824932C1 |
| Преобразователь угла поворота антенны радиолокационной станции в код | 1983 |
|
SU1119052A1 |
| Датчик скорости вращения | 1979 |
|
SU877438A2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
| Способ преобразования угла поворота вала в цифровой код | 1973 |
|
SU472360A1 |
| Датчик скорости вращения | 1976 |
|
SU600446A2 |
и,
У
диф.
г/;///4
п
т
Ч Т/////////////////////Л У
{п
30° S 90° ISO 210° 270°
I 000 100 I ПО
I Ш I Ш ЦБ IW
Р да /50 г70
3JO
/////////////////////t
330°
001 OOF:
Ч /
JO fi 5 /го 150 /80 210 270 300 330 360
IIгIIIIIIIII ,
d
lPi/S.2
