4 го VI
4
о
2 S
Фиг.1
Изобретение относится к упоавляю- щему устройству, которое может применяться для привода и управления движущейся моделью местности, например, при теневом проецировании для обучения водителей на тренажере транспортного средства.
Цель изобретения повышение эффективности работы и расширение функциональных возможностей устройства за счет имитации заноса транспортного средства при его движении по дорогам с низким коэффициентом сцепления.
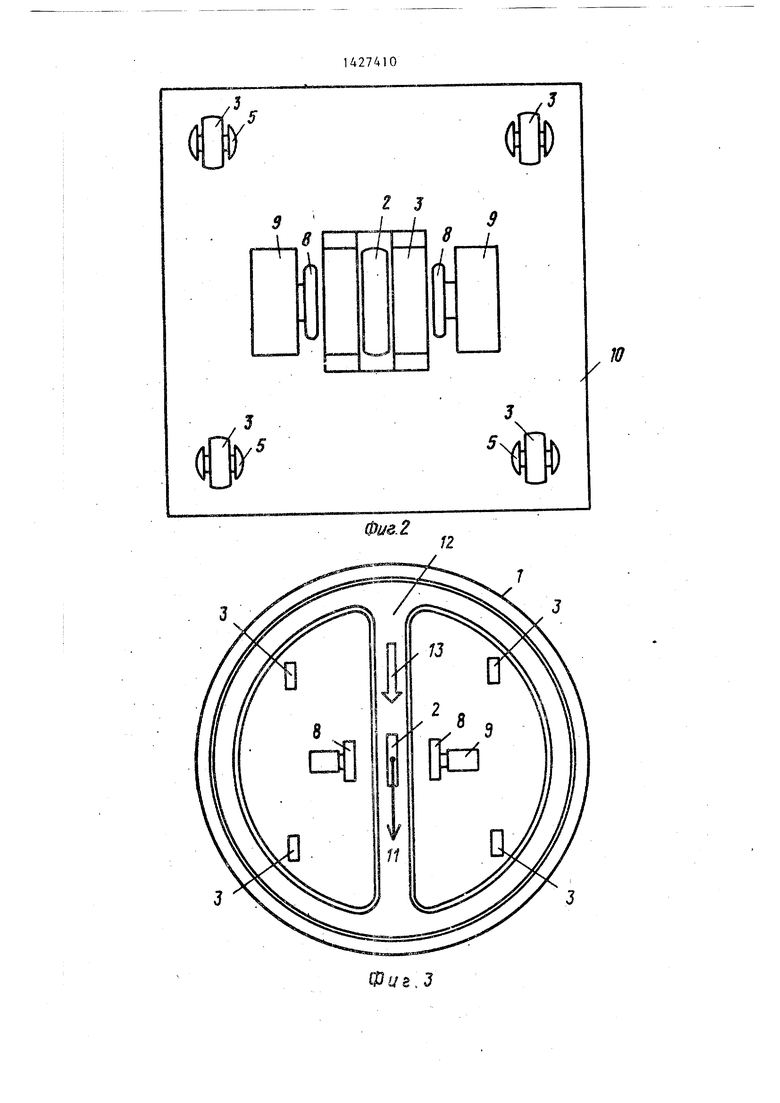
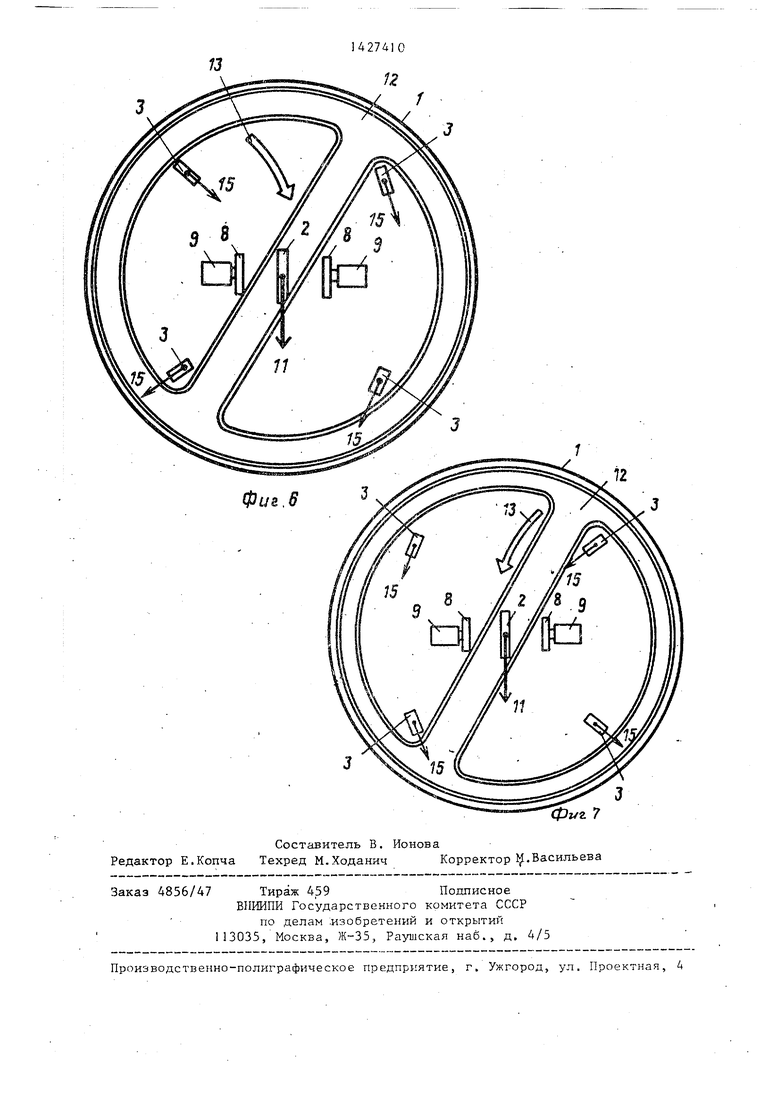
На фиг.1 представлено управляющее устройство, фронтальная проекция - на фиг.2 - то же, горизонтальная проекция; на фиг.З - схема движения макета местности при имитации прямолинейного движения в нормальнь х условиях; на фиг„4 - схема изменения траектории движения макета местности при имитации заноса влево; на фиг. 5 - схема действия при возврате к прямолинейной траектории движения при имитации заноса; на фиг.6 - схема появления дополнительного заноса в противоположную сторону после окончания заноса; на фиг.7 - схема действия при возврате к прямолинейной траектории дваже- ния из дополнительного заноса.
Управляющее устройство для теневого проецирования состоит из макета местности,, выполненного в уменьшенном масштабе на прозрачном фоне и установленного на ведущее колесо 2 и систему управляющих колес 3. Эта конструкция образует несущую систему макета 1 местности и одновременно в результате ее трения создает движение макета 1 местности в требуемом направлении и с требуемой скоростью. Для повьппения трения и одновременно для удерживания макета 1 местности на-ведущем колесе 2 и управляющих колесах 3 макет 1 местности сверху прижимается системой прижимных колес Aj установленной на осветительной системе 5, создающей изображение на экране, который установлен перед тренажером. Ведущее колесо 2 приводится в движение от приводного устройства 6, Управляющие колеса 3 свободно вращаются в несущих конструкциях- 5 связанных с рулевым управлением тренажера. Симметрично ведущему колесу 2 установлены два тор мозных колеса 8, катящихся свободно снизу макета местности, связанные с тормозными механизмами 9, Приводное
10
15
20
25
30
35
40
45
50
55
устройство 6, несущие конструкции 7 и тормозные механизмы 9 установлены на основании 10.
Устройство может иметь два варианта исполнения. В первом варианте прижимные колеса 4 одновременно могут быть тормозными, при этом они соединяются с тормозными механизмами 9, а сами тормозные механизмы 9 могут ус- танавливат ся на осветительной системе 5 . Во втором варианте симметрично прижимным.колесам 4,установлены два тормозные колеса 8, катящиеся свободно сверху макета местности, связанные с тормозными механизмами 9, а сами тормозные механизмы 9 могут устанавливаться на осветительной системе 5 .
Устройство работает следующим образом.
Макет местности передвигается в зависимости от управляющих сигналов тренажера по системе ведущих колес 2 и управляющих колес 3,,к которой он (макет) прижимается прижимными колесами 4. Усилие прижима создается осветительной системой 5, которая осве щает макет местности и на экране, установленном перед тренажером, в котором используется данное устройства, воспроизводит теневое изображение местности. Изменение траектории-движения макета 1 местно.сти производится изменением положения управляющих колес 3, связанных с рулевым управлением тренажера тягами (не показаны) .
При имитации прямолинейного движения (фиг.З) управляющие колеса 3 расположены прямолинейно (оси их вращения находятся на одной линии), а сила i 1 движения ггередается на макет 1 местности и в результате изображение 12 дороги перемещается по прямолинейной траектории 13.
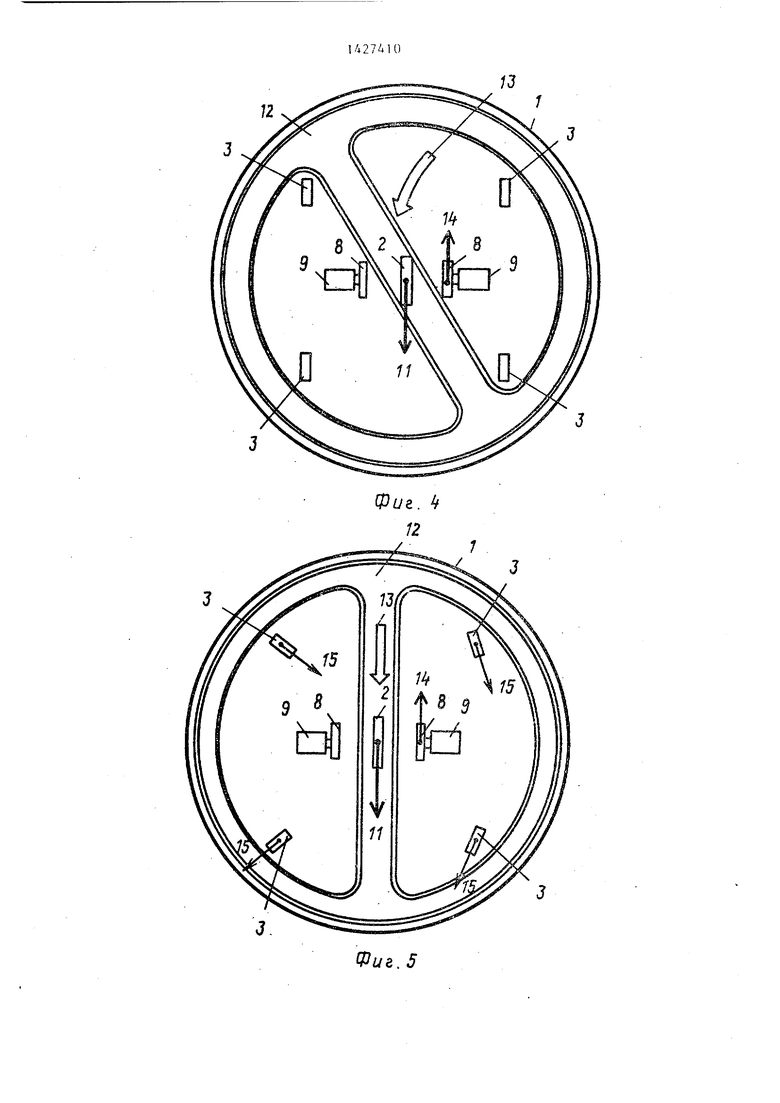
При имитации движения автомобиля по дороге со.скользким покрытием с заносом влево (фиг.4) управляющие колеса 3 расположены прямолинейно, сила 11 движения передается на макет 1 местности, включается правый тормозной механизм 9 и правое тормозное колесо 8 начинает тормозить правую сторону макета I местности. На макет 1 местности fleficTByeT одновременно пара сил: сила 1 дв ижения, создаваемая ведущим колесом 2, и сила 14 тормож е- НИИ, создаваемая правьгм тормозным колесом 8, В результате действия пары
3 uzy-ii
сил 11 и 14 изображение 12 дороги перемещается справа налево по криволинейной траектории 13 (т.е. макет 1
местности поворачивается против часо- вой стрелки). Этим имитируется на эк- ране тренажера занос транспортного средства влево.
Для вывода из заноса и возврата на прямолинейную траекторию движения Q необходимо управляющие колеса 3 повернуть в сторону заноса, т.е. влево (фиг.5). В результате на управляющих колесах 3 возникают силы 15 и суммарное воздействие на макет 1 местности 5 сил 11, 14 и 15 приводит к тому, что траектория 13 движения изображения 12 дороги вновь становится прямолинейной.
После выключения тормозного меха- 20 низма 9 (фиг.6) тормозное колесо 8 перестает создавать силу 15 торможения, но управляющие колеса 3 при зтом
остаются повернутыми, и в результате под действием пары сил II и 15 нзоб- 25 ражение 12 дороги перемещается слева направо по криволинейной траектории 13 (т.е. макет 1 местности поворачивается по часовой стрелке). Этим имитируется дополнительный занос ; 0 йправо т.е. в противоположную сторону от первоначального заноса). Появление дополнительного заноса и его величина определяется умением обучаемого оперировать рулевым управлением. Для вывода из этого дополнительного заноса и возврата на прямолинейную траекторию движения (фиг.7) необходимо управляющие колеса 3 повернуть также, вправо (в сторону заноса) . При . этом изображение 12 дороги перемещается справа налево по криволинейной траектории 13 до возобновления прямолинейного движениям после чего управляющие колеса 3- необходимо повернуть
35
Q 5
0
5 0
5
О
в первоначальное положение аналогично
фиг.3.
Имитация движения транспортного средства по дороге со скользким покрытием с заносом вправо производится аналогично, но при этом работают левое тормозное устройство и левое тормозное колесо.
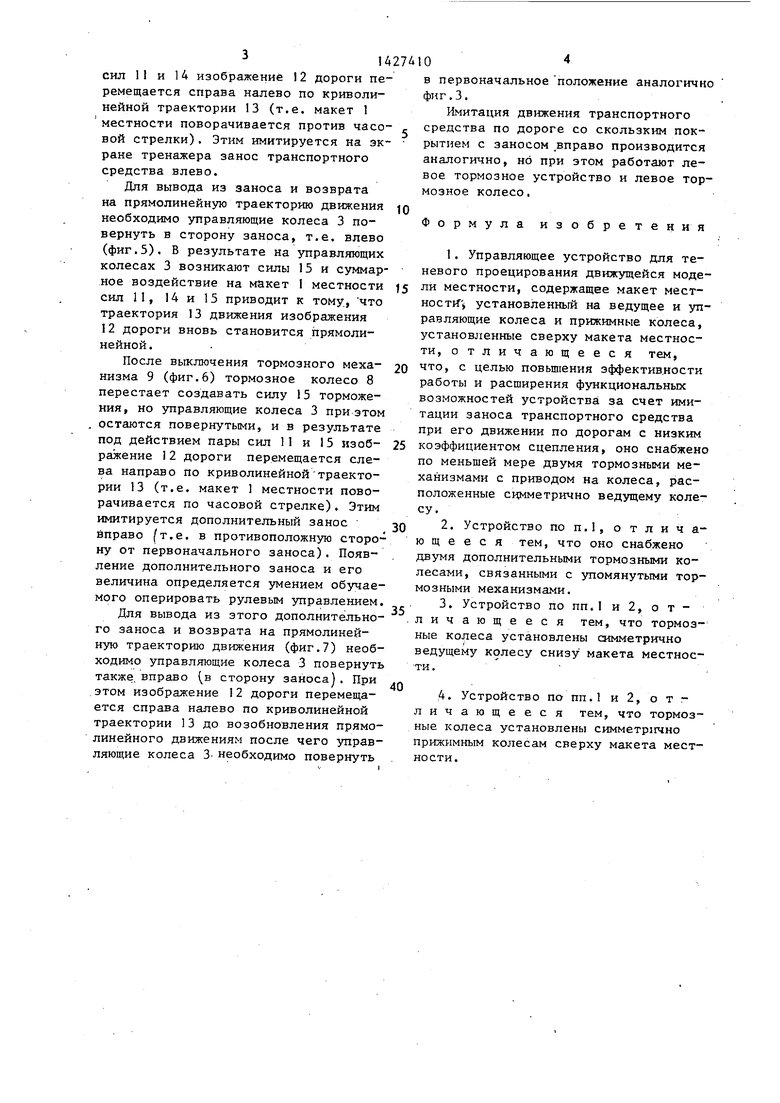
Формула изобретения
1.Управляющее устройства для теневого проецирования движущейся модели местности, содержащее макет мест- HOCTrf j установленный на ведущее и управляющие колеса и прижимные колеса, установленные сверху макета местности, отличающееся тем, что, с целью повышения эффективности работы и расширения функциональных возможностей устройства за счет имитации заноса транспортного средства при его движении по дорогам с низким коэффициентом сцепления, оно снабжено по меньшей мере двумя тормозными механизмами с приводом на колеса, расположенные симметрично ведущему колесу.
2.Устройство по п.1, о т л и ч а- ю щ е е с я тем, что оно снабжено двумя дополнительными тормозными колесами, связанными с упомянутыми тормозными механизмами.
3.Устройство по ПП.1 и 2, о т - личающееся тем, что тормозные колеса установлены симметрично ведущему колесу снизу макета местности.
4.Устройство по ПП.1 и 2, о т - личающееся тем, что тормозные колеса установлены симметрично прижимным колесам сверху макета местности.
Фие.2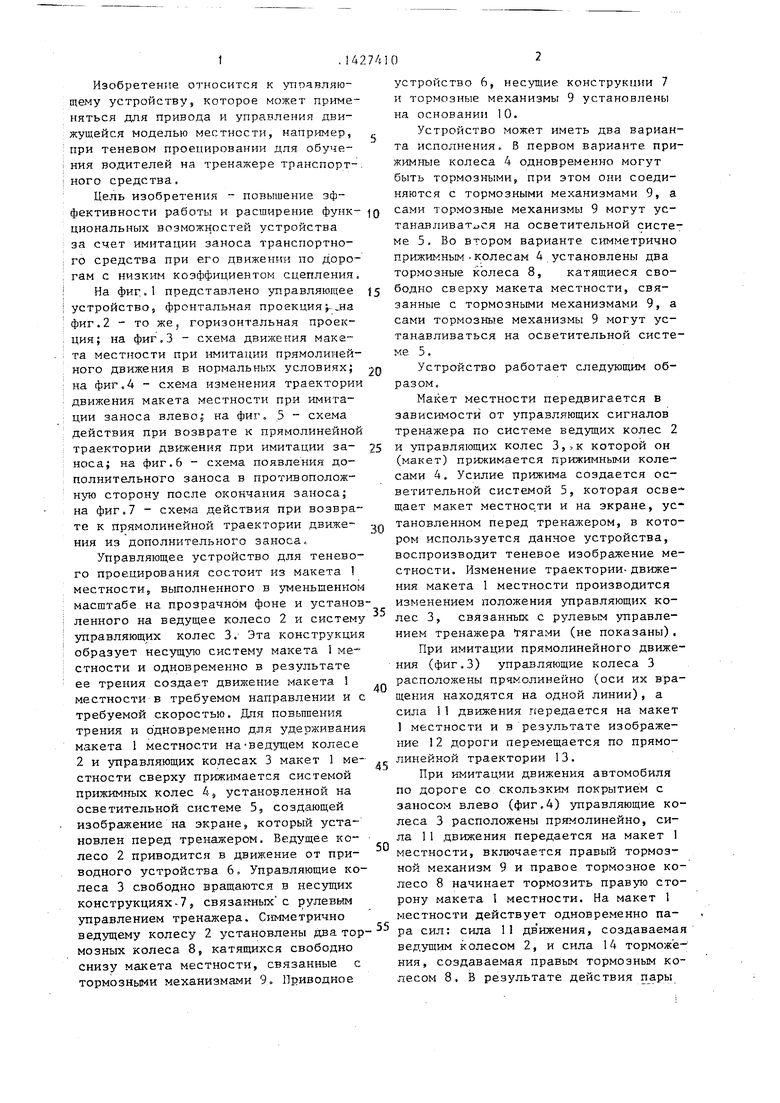
| название | год | авторы | номер документа |
|---|---|---|---|
| аСЕСФЮЗНАЯ iiAlLHTl'D-TEXKHHECKAf | 1973 |
|
SU388296A1 |
| Автомобильный тренажер | 1973 |
|
SU506904A1 |
| Теневой проектор тренажера транспортных средств | 1977 |
|
SU741312A1 |
| Имитатор визуальной обстановки тренажера транспортного средства | 1985 |
|
SU1355992A1 |
| ВСЕСОЮЗНАЯ ПАТ?НТНО-ЯХВл'1Е;'КДЙБИБЛИОТЕКА | 1971 |
|
SU317095A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ИССЛЕДОВАНИЯ РАБОТЫ ОПЕРАТОРА | 2002 |
|
RU2215330C1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| Тренажер | 1972 |
|
SU456295A1 |
| АВТОБУСНЫЙ ТРЕНАЖЕР | 2011 |
|
RU2467400C1 |
| ТРЕНАЖЕР ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2320022C2 |
Изобретение относится к управляющему устройству, которое может применяться для привода и управления движущейся моделью местности, например, при теневом проецировании для обучения водителей на тренажере транспортного средства, Цель изобретения - повышение эффективности работы и расширение функциональных возможног стей устройства за счет имитации заноса транспортного средства при его движении по дорогам с низким коэффициентом сцепления. Устройство содержит макет 1 местности, установленный на ведущее колесо 2, управляющие колеса 3 и тормозные колеса 8, связанные с тормозными механизмами 9. Сверху макета установлены прижимные колеса 4. При приведении в движение макета местности и воздействии на тормозные механизмы 9 на макет местности действуют силы, стремящиеся развернуть его относительно направления первоначального движения. Для вывода транспортного средства из заноса управляющие колеса 3 необходимо повернуть в сторону заноса. Предлагаемое устройство позволяет повысить качество подготовки водителей на тренажере. 2 3.п,ф-лы, 7 ил. (О с
уг. J
Фиг. 5
фг/г 7
| Подъемный гак большой грузоподъемности | 1960 |
|
SU133995A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
