Изобретение относится к космической технике.
Известно страховочное устройство, предназначенное для страховки космонавта при работе в космическом пространстве на поверхности и вблизи космических объектов. Оно содержит корпус, барабан с гибким элементом и укладчиком, тормоз с формирователем команд управления, кинематически связанный с барабаном, и механизм выборки гибкого элемента, выполненный в виде электропривода и муфты тарированного момента, вход которой кинематически соединен с электроприводом, а выход с барабаном.
Данное страховочное устройство обладает следующими недостатками:
для функционирования необходимо, чтобы гибкий элемент поступал на укладчик в плоскости параллельной оси барабана и касательной поверхности укладки, т.е. при перемещениях космонавта вход- выход устройства страховочного должен быть направлен в сторону закрепления гибкого элемента на борту орбитальной станции, в противном случае либо укладчик выходит из
строя, либо усиление его конструкции приводит к росту сил трения в нем.
При перемещении космонавта относительно расчетного направления выхода гиб- к ого элемента в месте входа - выхода страховочного, устройства увеличиваются силы трения и появляется возможность заклинивания гибкого элемента или его повреждения.
Целью изобретения является обеспечение работоспособности страховочного устройства при угловых отклонениях гибкого элемента, возникающих при перемещениях космонавта. Она достигается тем, что в страховочное устройство, содержащее корпус, барабан с гибким элементом и укладчиком, тормоз с формирователем команд управления, кинематически связанный с барабаном, и механизм выборки гибкого элемента, выполненный в виде электропривода и муфты тарированного момента, вход которой кинематически соединен с электроприводом, а выход с барабаном, согласно изобретения, вводится механизм вывода гибкого элемента, содержащий поворотный вал, ограничительные ролики с проточками на входе в следящий поворотный узел. Узел
VJ
О
о к
о ю
установлен в подшипниках качения относительно оси выпуска гибкого элемента и содержит две следящие дуги, плоскости которых параллельны оси выпуска гибкого элемента, и два опорных ролика с проточками, оси которых перпендикулярны плоскости следящих дуг.
При этом каналы, образованные проточками ограничительных и воспринимающих роликов, расположены также симметрично относительно оси выпуска гибкого элемента.
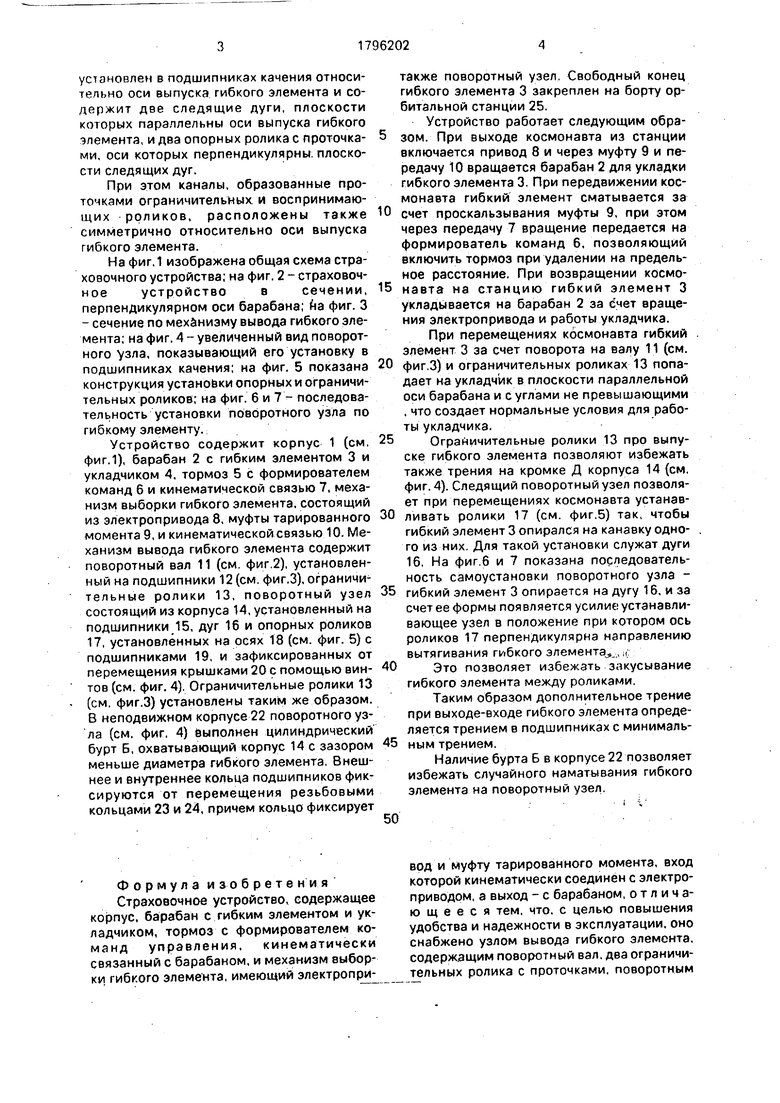
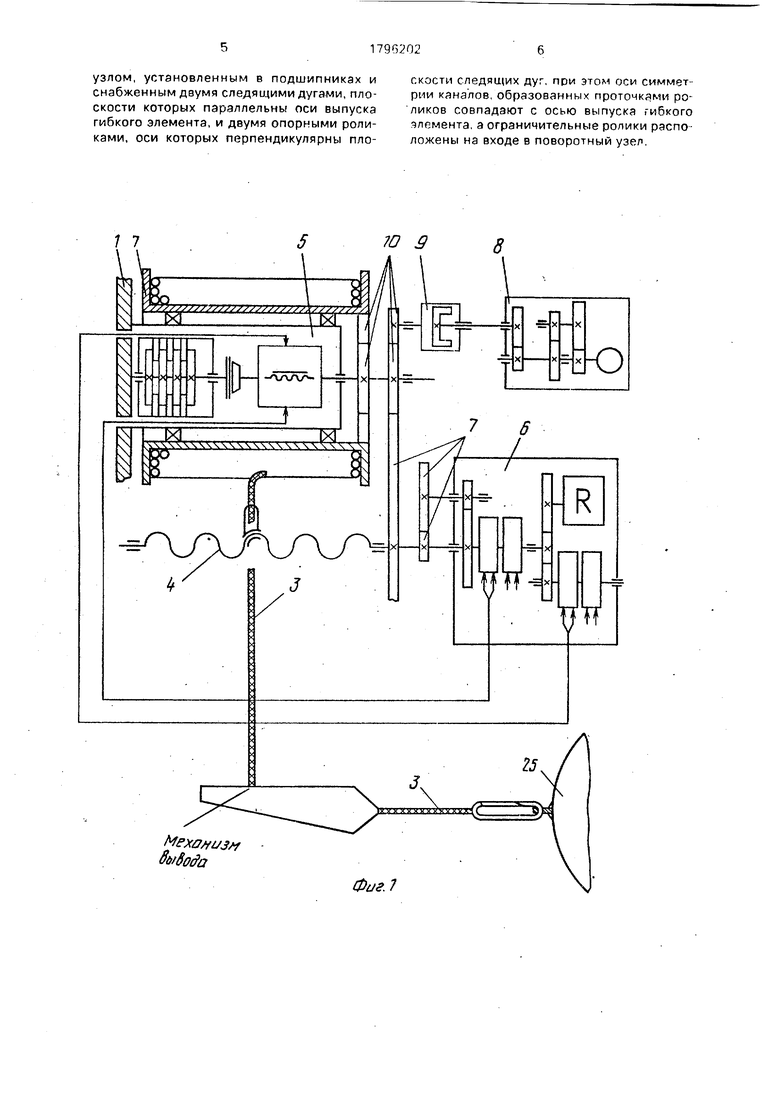
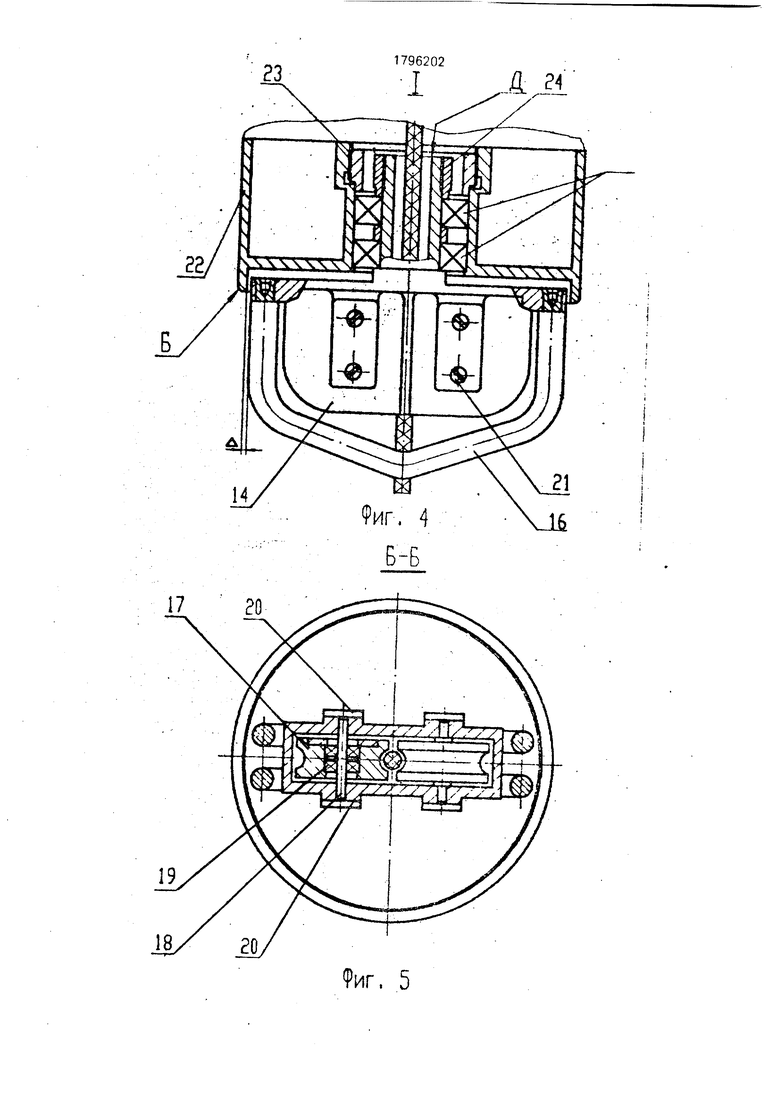
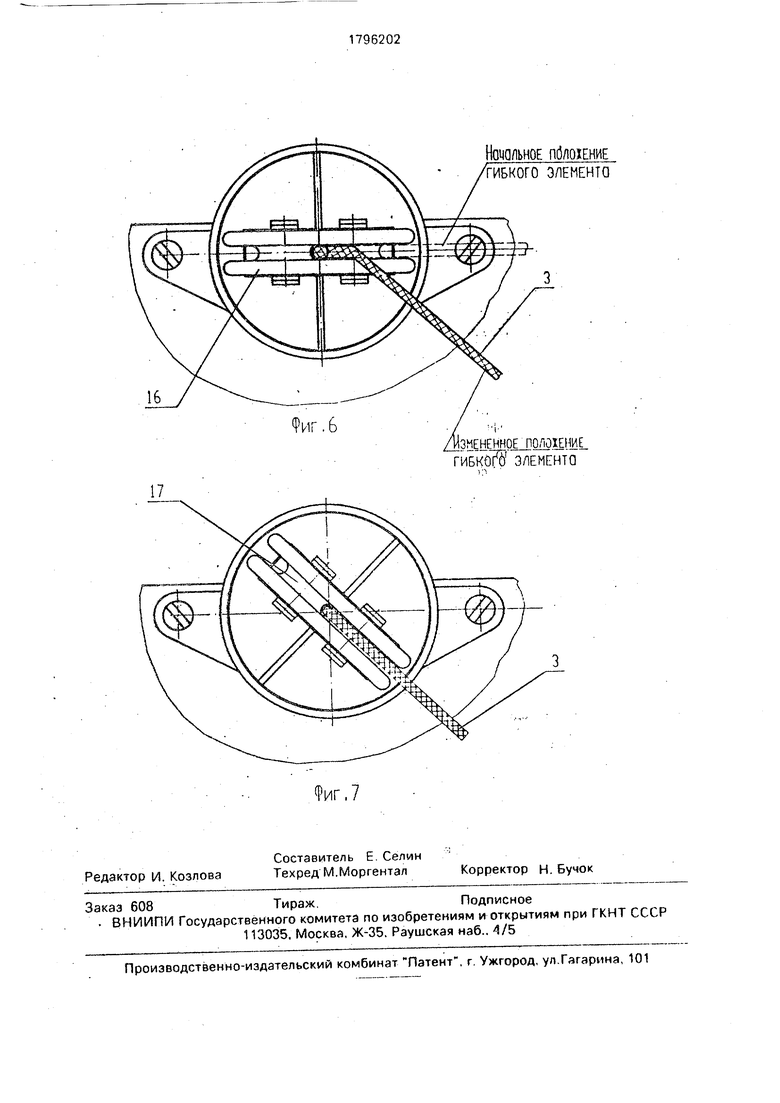
На фиг.1 изображена общая схема страховочного устройства; на фиг. 2 - страховоч- ное устройство в сечении, перпендикулярном оси барабана; йа фиг. 3 - сечение по механизму вывода гибкого элемента; на фиг. 4 - увеличенный вид поворотного узла, показывающий его установку в подшипниках качения; на фиг. 5 показана конструкция установки опорных и ограничительных роликов; на фиг. 6 и 7 - последовательность установки поворотного узла по гибкому элементу.
Устройство содержит корпус 1 (см. фиг.1), барабан 2 с гибким элементом 3 и укладчиком 4, тормоз 5 с формирователем команд 6 и кинематической связью 7, механизм выборки гибкого элемента, состоящий из электропривода 8, муфты тарированного момента 9, и кинематической связью 10. Механизм вывода гибкого элемента содержит поворотный вал 11 (см. фиг.2), установленный на подшипники 12 (см, фиг.З), ограничи- тельные ролики 13, поворотный узел состоящий из корпуса 14, установленный на подшипники 15, дуг 16 и опорных роликов 17, установленных на осях 18 (см. фиг. 5) с подшипниками 19, и зафиксированных от перемещения крышками 20 с помощью винтов (см. фиг. 4). Ограничительные ролики 13 (см. фиг.З) установлены таким же образом. В неподвижном корпусе 22 поворотного узла (см. фиг. 4) выполнен цилиндрический бурт Б, охватывающий корпус 14 с зазором меньше диаметра гибкого элемента. Внешнее и внутреннее кольца подшипников фиксируются от перемещения резьбовыми кольцами 23 и 24, причем кольцо фиксирует
также поворотный узел. Свободный конец гибкого элемента 3 закреплен на борту орбитальной станции 25.
Устройство работает следующим образом. При выходе космонавта из станции включается привод 8 и через муфту 9 и передачу 10 вращается барабан 2 для укладки гибкого элемента 3. При передвижении космонавта гибкий элемент сматывается за
счет проскальзывания муфты 9, при этом через передачу 7 вращение передается на формирователь команд 6, позволяющий включить тормоз при удалении на предельное расстояние. При возвращении космонавта на станцию гибкий элемент 3 укладывается на барабан 2 за счет вращения электропривода и работы укладчика.
При перемещениях космонавта гибкий элемент 3 за счет поворота на валу 11 (см.
фиг.З) и ограничительных роликах13 попадает на укладчик в плоскости параллельной оси барабана и с углами не превышающими , что создает нормальные условия для работы укладчика.
Ограйичительные ролики 13 про выпуске гибкого элемента позволяют избежать также трения на кромке Д корпуса 14 (см. фиг. 4). Следящий поворотный узел позволяет при перемещениях космонавта устанавливать ролики 17 (см. фиг.5) так, чтобы гибкий элемент 3 опирался на канавку одно- то из них. Для такой установки служат дуги 16, На фиг.6 и 7 показана последовательность самоустановки поворотного узла гибкий элемент 3 опирается на дугу 16, и за счет ее формы появляется усилие устанавливающее узел в положение при котором ось роликов 17 перпендикулярна направлению вытягивания гибкого элемента и;
Это позволяет избежать закусывание гибкого элемента между роликами.
Таким образом дополнительное трение при выходе-входе гибкого элемента определяется трением в подшипниках с минимальным трением.
Наличие бурта Б в корпусе 22 позволяет избежать случайного наматывания гибкого элемента на поворотный узел.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАМОТКИ И/ИЛИ РАЗМАТЫВАНИЯ ГИБКОГО ДЛИННОМЕРНОГО МАТЕРИАЛА С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ НАМОТКИ ИЛИ РАЗМАТЫВАНИЯ | 1992 |
|
RU2015764C1 |
| Устройство для натяжения и укладки гибких элементов | 1990 |
|
SU1804422A3 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| УСТАНОВКА НАМОТКИ-ВЫМОТКИ И ОБОГРЕВА КАБЕЛЯ ПОГРУЖНЫХ ЭЛЕКТРОНАСОСОВ | 1999 |
|
RU2172870C2 |
| ЭЛЕКТРОУПРАВЛЯЕМЫЙ МАГНИТНО-ДИСПЕРСИОННЫЙ ТОРМОЗ И НАГРУЖАТЕЛЬ СПОРТИВНЫХ ТРЕНАЖЕРОВ С ЭЛЕКТРОУПРАВЛЯЕМЫМ МАГНИТНО-ДИСПЕРСИОННЫМ ТОРМОЗОМ | 1998 |
|
RU2135243C1 |
| Устройство для непрерывной намотки на катушки нитеобразных материалов | 1972 |
|
SU448903A1 |
| ТРАЛОВАЯ ЛЕБЕДКА | 1970 |
|
SU285409A1 |
| АГРЕГАТ ДЛЯ ОБСЛУЖИВАНИЯ НЕФТЕГАЗОВЫХ СКВАЖИН | 1994 |
|
RU2061834C1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
Сущность изобретения: механизм вывода гибкого элемента, содержит поворотный вал, два ограничительных ролика, поворотный узел на выходе со следящими дугами, устанавливающие поворотный узел в положение, при котором гибкий элемент опира- ется на один из двух роликов, установленных в корпусе поворотного узла. Введение поворотного вала и роликов позволяет создать нормальные условия для работы укладчика. 7 ил.
Формула изобретения Страховочное устройство, содержащее корпус, барабан с гибким элементом и укладчиком, тормоз с формирователем команд управления, кинематически связанный с барабаном, и механизм выборки гибкого элемента, имеющий электропривод и муфту тарированного момента, вход которой кинематически соединён с электроприводом, а выход - с барабаном, отличающееся тем. что, с целью повышения удобства и надежности в эксплуатации, оно снабжено узлом вывода гибкого элемента, содержащим поворотный вал. два ограничительных ролика с проточками, поворотным
узлом, установленным в подшипниках и снабженным двумя следящими дугами, плоскости которых параллельны оси выпуска гибкого элемента, и двумя опорными роликами, оси которых перпендикулярны плоскости следящих дуг, при этом оси симметрии каналов, образованных проточками ро- ликов совпадают с осью выпуска гибкого элемента, а ограничительные ролики расположены на входе в поворотный узел.
| Страховочная лебедка, 21 КС | |||
| БОЮ.0000- ОТУ | |||
| разработчик НПО Энергия | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
