о оо го
М
Изобретение относится к передаточным механизмам машин, а именно к механизмам для превращения вращательного движения в возвратно-вращательное с определенной зависимостью угла поворота ведомого вала от угла поворота ведущего вала, а именно по закону синуса (косинуса), т.е, гармоническому.
Известен кулачковый механизм, который может быть синусным, содержащий стойки, кулачок и колесо с двумя толкателями, осуществляющими геометрическое замыкание кулачковой пары.
Недостатком кулачкового механизма является низкая точность воспроизведения закона движения, сложность изготовления и ремонта, а также ограниченность амплитуды. ..:-....-
Известен синусный механизм, содержащий стойку, кривошип, две пары скольжения, зубчатую рейку и шестерню, зацепляющуюся с рейкой и размещенную в плоскости вращения кривошипа.
Механизм-прототип прост в изготовлении, математически точен и может обеспечить любую амплитуду движения выходного вала, но этот механизм не может быть сило-. вым из-за обилия в нем пар скольжения, длинных консолей. Сделать такой механизм прочным и долговечным невозможно принципиально, . .. .
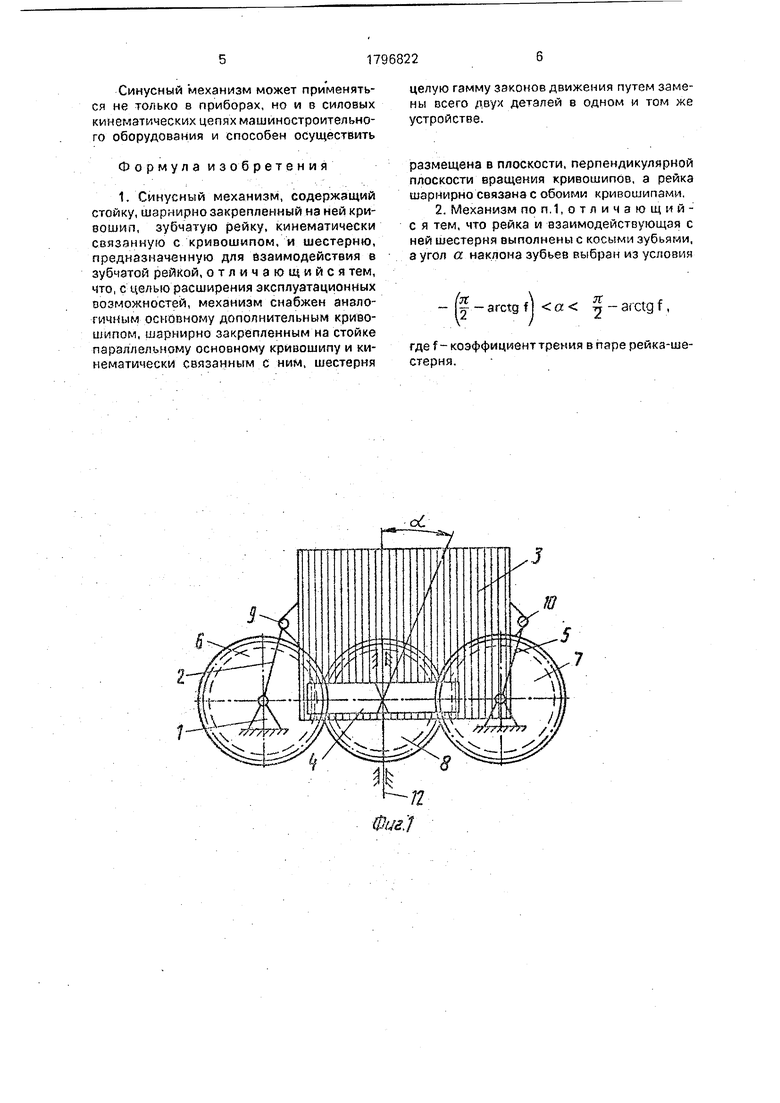
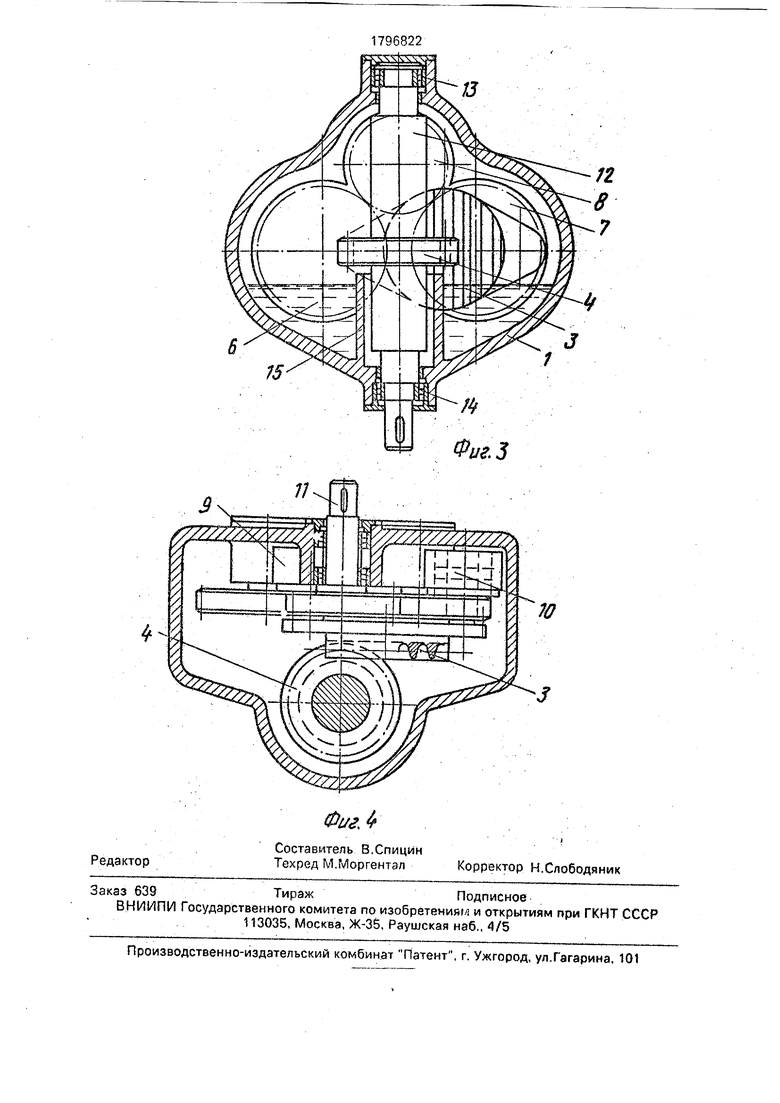
I fa фигЛ и 2 показана схема механизма, вид сбоку и сверху; на фиг.З и 4 - конструктивное исполнение, также вид сбоку и сверху,Механизм содержит стойку 1, которая крепится на технологической машине жестко неподвижно, кривошип 2, зубчатую рейку 3 и шестерню 4, Механизм снабжен вторым кривошипом 5, равным и параллельным первому кривошипу 2, Кривошип 5 кинематически при помош,и зубчатых колес б,.7 и 8 соединен с кривошипом 2, Передаточное отношение 1 : 1. В зацеплении рейка 3 - шестерня 4 осуществляется скольжение вдоль зубьев зацепления. Рейка 3 шарнирами 9 и 10 соединена с обоими кривошипами 2 и 5, а шестерня А размещена в плоскости, перпендикулярной плоскости вращения кривошипов 2 и 5. Входной вал обозначен 11, а выходной 12, На фиг.З и А показано, что выходной вал установлен в подшипниках 13 и 14, В корпусе 1 снизу выполнен стакан 15 и полость корпуса по уровню ниже верхнего среза стакана 15 и залита маслом. Рейка 3 изготовлена из закаленной стали, а шестер- ,ня 4 - из бронзы.
Зацепление рейка 3 - шестерня 4 для создания неравенства между ходом вперед и ходом назад выходного вала 12
выполнено косозубым с углом наклона зуба а, выбранным из условия
-(f -arctgf)« Ј-arctgf,
где f - коэффициент трения в паре рейка-шестерня.
Механизм работает следующим образом.
Вал входной 11 от внешнего источника движения приводится в равномерное вращение. Через шестерни 8 - 6 и 8 - 7 равномерное вращение получают кривошипы 2 и
5 (на фиг.З и 4 они выполнены заодно с шестернями 6 и 7 путем эксцентричного расположения подшипников 9 и 10 непосредственно в теле шестерен).
Кривошипы 2 и 5, вращаясь, остаются
параллельными друг другу, и при равной их длине через шарниры 9 и 10 каждая точка рейки 3 получает плоское круговое движение, которое на зубьях шестерни 4 преобразуется за счет скольжения зубьев рейки в
вертикальном направлении в синусное. В результате выходной вал 12 движется по закону 1р A sfn со t, где (о - угловая частота кривошипов, А - амплитуда движения вала 12.. .
В технике иногда возникает задача сделать ход вперед и ход назад неравными. Для этого механизм имеет косозубое зацепление рейка шестерня с углом а . Тогда механизм воспроизводит закон движения
вала 12: у A(sin ft) t + 2 tgcr sin2 t).
Таким образом механизм воспроизводит указанный выше закон при
(f arct9 f) й arctg f
где f- коэффициент трения в паре рейка-шестерня. При среднем угле интервала а О воспроизводится чисто синусный закон.
Весь механизм, имеющий всего одну пару трения - в зубьях рейки - шестерни, работает в масляной ванне. Благодаря точному исполнению зубчатого зацепления в отличие of кулис-камней и направляющих в прототипе и подбору материалов рейки и шестерни аналогично червячным парам в масляной ванне, пара трения рейка-шестерня работает надежно и долговечно. Ремонт- ные рабсты также упрошены. Все изнашивающиеся поверхности изготавливаются на стандартном зубонарезном оборудовании, дающем постоянное и высокое качество.
Синусный механизм может применяться не только в приборах, но и в силовых кинематических цепях машиностроительного оборудования и способен осуществить
Формула из обретения
1. Синусный механизм, содержащий стойку, шарнирио закрепленный на ней кривошип, зубчатую рейку, кинематически связанную с кривошипом, и шестерню, предназначенную для взаимодействия в зубчатой рейкой, отличающийся тем, что, с целью расширения эксплуатационных возможностей, механизм снабжен аналогичным основному дополнительным кривошипом, шарнирно закрепленным на стойке параллельному основному кривошипу и кинематически связанным с ним, шестерня
целую гамму законов движения путем замены всего двух деталей в одном и том же устройстве.
размещена в плоскости, перпендикулярной плоскости вращения кривошипов, а рейка шарнирно связана с обоими кривошипами,
2. Механизм по п. 1,отличающий- с я тем, что рейка и взаимодействующая с ней шестерня выполнены с косыми зубьями, а угол а наклона зубьее выбран из условия
- (f - arctg f I a - arctg f,
где f-коэффицменттрения в паре рейка-шестерня.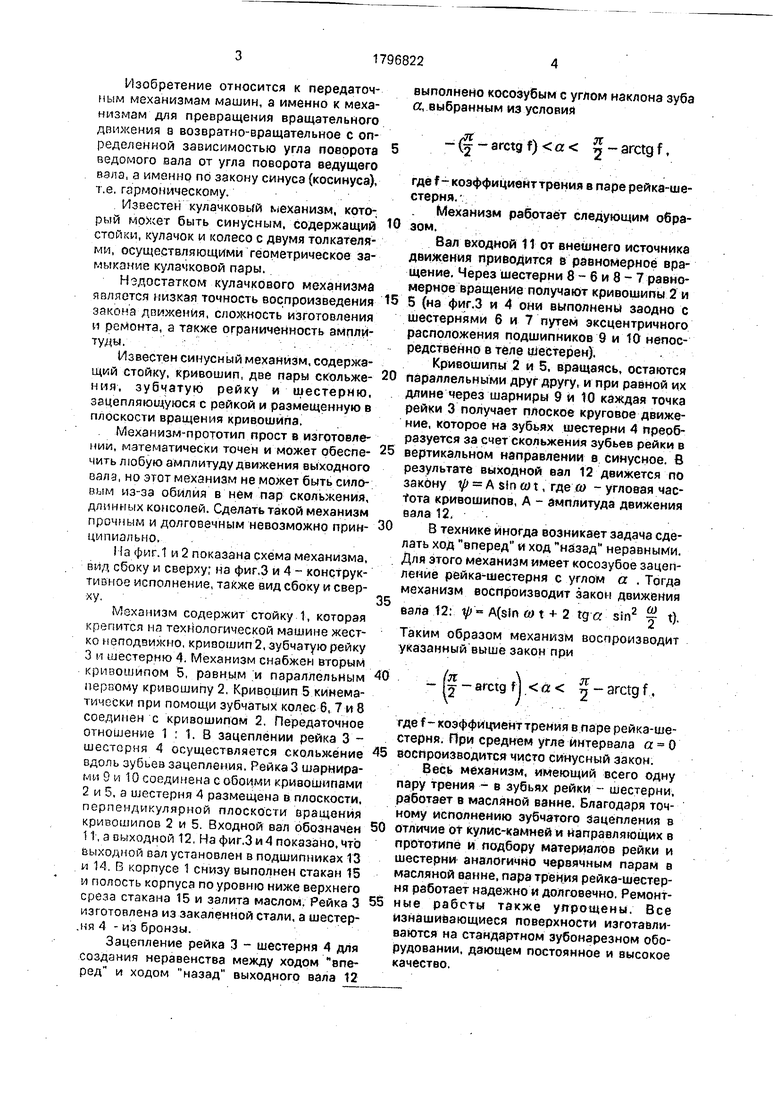
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2005 |
|
RU2308603C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Станок для обработки некруглых зубчатых колес | 1977 |
|
SU626901A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2000 |
|
RU2179673C1 |
| Импульсная изменяемая передача вращения | 2016 |
|
RU2629765C2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1993 |
|
RU2086481C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РАСЧЕТА ШАТУННО-КУЛАЧКОВЫХ МЕХАНИЗМОВ | 1970 |
|
SU274360A1 |
| Механизм преобразования вращательного движения | 1984 |
|
SU1232885A1 |
Изобретение относится к передаточным механизмам машин, а именно к механизмам для превращений вращательного движения в возвратно-вращательное с определенной зависимостью угла поворота ведомого вала от угла поворота ведущего вала, а именно по гармоническому закону. Цель изобретения - расширение эксплуатационных возможностей. Положительный эффект достигается снабжением механизма дополнительным кривошипом 5, шарнирно закрепленным на стойке параллельно основному кривошипу 2 и кинематически связанным с ним. Шестерня 4 размещена в плоскости, перпендикулярной плоскости вращения кривошипов 2 и 5, а рейка 3 шарнирно связана с обоими кривошипами 2 и 5. Кинематическая связь между кривошипами 2 и 5 осуществляется посредством зубчатых колес 6, 7 и 8, От входного вала 11 равномерное вращение . через шестерни 8 - 6 и 8 - 7 получают кривошипы 2 и 5. Через шарниры 9 и 10 рейка 3 получает плоское круговое движение, которое на зубьях шестерни 4 преобразуется в синусное. В результате выходной вал 12 движется по закону ip A -sin ш t, где а) угловая частота вращения кривошипов 2 и . 5, А - амплитуда движения вала 12. 1 з.п, ф-лы, 4 ил, (Л /О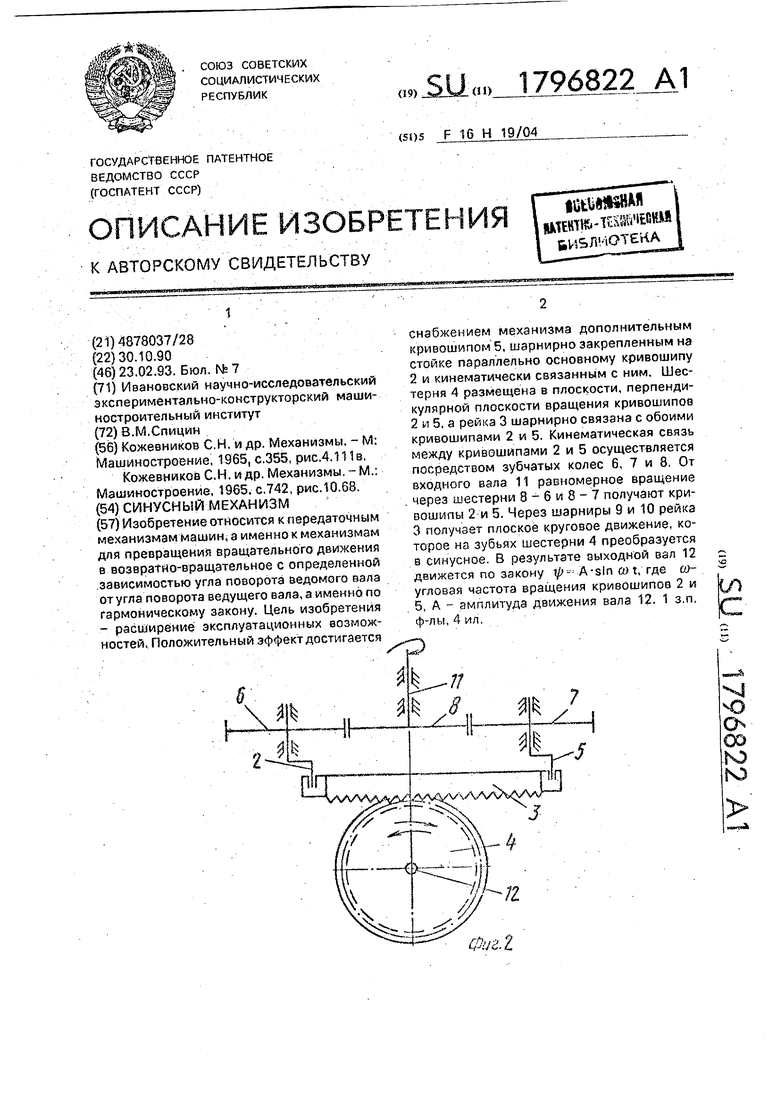
ФигЛ
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| - М: Машиностроение, 1965, с.355, рис.4.111 в, Кожевников С.Н, и др | |||
| Механизмы | |||
| - М.: Машиностроение, 1965, с.742, рис.10.68 |
