Изобретение относится к автоматизации процессов сушки материалов во вращающихся барабанных сушилках, в которых сушка осуществляется обогревом сырого материала/движущегося по барабану, топочными газами и может быть использовано при автоматизации процесса производства сухого птичьего помета.
Цель изобретения - увеличение производительности режима сушки сыпучих материалов,
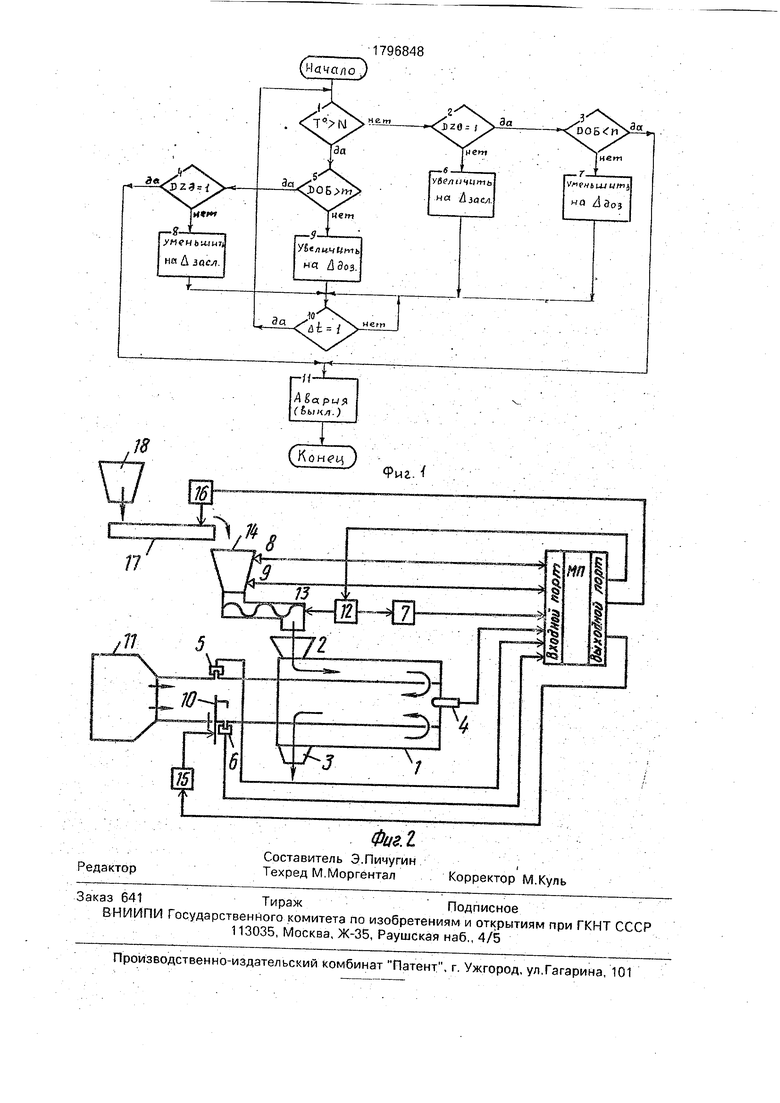
На фиг.1 приведена блок-схема алгоритма, поясняющего сущность предлагаемого способа; на фиг.2 - устройство для осуществления способа.
Блок 1 производит сравнение действительной выходной температуры с заданной температурой стабилизации. В случае превышения действительной температуры над заданной (блок 1 - да) производится опрос датчика скорости загрузки сырого материала (датчика оборотов шнека) (блок 5), в противном случае (блок 1 - нет) - опрос датчика открытого положения заслонки теп- логенератора (блок 2). Если заслонка полностью открыта (блок 2 - да), производится сравнение действительного значения датчика скорости загрузки сырого материала с заданным минимальным значением этой скорости п (блок 3). В противном случае (блок 2 - нет) заслонка дополнительно приоткрывается на величину уставки Л заел (блок 6) и производится выдержка времени, величина которой зависит от конкретных
размеров барабана, скорости распространения теплового агента внутри барабана и допустимой величины отклонения выходной температуры от заданной (блок 10).
Если действительное значение датчика скорости загрузки сырого материала в барабан меньше заданного минимального значения п (блок 3 - да), то ситуация считается аварийной и производится выключение (блок 11), а в противном случае (блок 3 - нет) производится уменьшение скорости загрузки на величину уставки Д доз (блок 7) и переход к блоку 10. Если значение скорости загрузки больше максимально заданного значения т (блок 5 - да), то производится проверка датчика закрытого положения заслонки теплогенератора (блок 4), в противном случае (блок 5 - нет) производится увеличение скорости загрузки сырого материала в барабан на величину уставки Ддоз (блок 9) и переход к блоку 10. Если датчик конечного положения заслонки тёплогенератора показывает, что она закрыта (блок 4 - да), производится переход к блоку 11, в противном случае (блок 4 - нет) заслонка дополнительно закрывается на величину уставки Д заел (блок 8} и производится переход к блоку 10.
Устройство содержит сушильный барабан 1 вместе с загрузочной и разгрузочной течками 2 и 3 соответственно, датчики 4,5,6,7,8,9 температуры сушильного агента внутри барабана, открытого и закрытого положений заслонки 10 теплогенератора 11, рбРрртЬв двигателя 12 шнека 13, верхнего и нижнего уровня материала в бункере 14 соответственно, соединенных с входом блока- управления (БУ), выходы которого соединены с приводом 15 перемещения заслонки 10, с двигателем 12 вращения шнека 13, с двигателем 16 транспортера 17, с мо- трр-редуктрррм 18 вращения барабана 1 и главный бункер IS.
Режим сушки ведется по трехконтурной системе управления. Первый контур регулирования скорости подачи сырого материала 66 вращающийся барабан состоит из следующих устройств: датчика 4 температуры, датчика 7 оборотов, блока управления, двигателя 12 шнека 13. Второй контур регулирования подачей теплоносителя б барабан состоит из: теплогенератора 11с перемещаемой заслонкой 10 концевых датчиков 5,6 крайних положений заслонки 10, блока управления, привода 15 перемещений заслонки 10.8 третий контур стабилизации уровня сырого материала входят следующие устройства: накопительный бункер 19 подающий транспортер 17 с двигателем 16, блок
управления, датчики 8,9 верхнего и нижнего уровня сырого материала в подающем бункере 14 соответственно, Первый контур обеспечивает выход системы на предельно
возможный режим загрузки сырого материала во вращающийся барабан, второй контур обеспечивает стабилизацию заданной температуры материала на выходе барабана, при данном режиме загрузки, третий
контур обеспечивает поддержание необходимого уровня сырого материала в подающем бункере.
Устройство работает следующим образом. Сигнал от датчика 4 температуры су-
шильного агента в слое материала, хорошо коррелирующий со значением температуры нагрева материала, поступает в блок управления. Если значение температуры превысило заданную верхнюю границу, а
показание датчика 7 оборотов двигателя 12
шнека 13 не достигло верхнего заданного
предела на скорость загрузки материала, то
блок управления выдает команду на увелйчение оборотов на величину уставки Ддоз
которая выбирается из условий заданной точности регулирования. Если обороты дай- гателя 12 максимальны, то блок управления проверяет показание датчика 5 закрытого положения заслонки 10. Если заслонка 10
не закрыта, то блок управления выдает команду двигателю 15 на перемещение заслонки 10 в сторону закрывания на величину уставки Д заел, которая также выбирается us условий необходимой точности регулировйния.,
Если датчик 5 показывает, что заслонка 10 полностью закрыта, то блок управления формирует команду на выключение устройства, так как такая ситуация считается авзрийной.
Если температура меньше заданной нижней границы, то блок управления анализирует показания датчика 6. Если заслонка 10 находится не в крайнем открытом поло- жении, то блок управления выдает команду .двигателю 15 на перемещение заслонки 10 в сторону открывания на величину уставки
Дзасл.
Если заслонка 10 полностью открыта, то блок управления сравнивает показание датчика 7 оборотов двигателя 12 с нижним заданным пределом. Если обороты двигателя 12 не минимальны, блок управления выдает команду на уменьшение оборотов двигателя 12 на величину уставки Ддоз. Если обороты минимальны, то ситуация считается аварийной и устройство выключается.
Загрузка подающего бункера 14 производится по показаниям датчиков 8,9 верхнего и нижнего уровня соответственно. При выключении датчика 9 блок управления выдает команду на включение двигателя 16 транспортера 17 и сырой материал поступает из накопительного бункера 19 в подающий бункер 14 до тех пор, пока не сработает датчик 8 верхнего уровня, после чего блок управления выдает команду на выключение двигателя 16.
Мотор-редуктор 18 вращения барабана 1 включается по команде блока управления .в момент запуска всей системы и выключается по команде блока управления в момент окончания процесса сушки либо в аварийной ситуации. -
Накопительный бункер 19 загружается известным способом, например самосвальным.
0
5
Предлагаемый способ и устройство для его осуществления имеют ряд преимуществ. Так, использование трех контуров управления, а именно контур регулирования скорости подачи сырого материала во вращающийся барабан, контур стабилизации уровня сырого материала и контур регу- лмрования подачи теплоносителя, позволяющих вести процесс сушки с максимально возможной скоростью загрузки сырого материала, позволит увеличить производительность процесса сушки.на 10% по сравнению с прототипом.
Кроме того, предлагаемое техническое решение, позволит уменьшить энергоемкость за счет адаптации модели к случайным сбоям, а следовательно, выбора технических средств оптимальной мощности.;
| название | год | авторы | номер документа |
|---|---|---|---|
| ШНЕКОВЫЙ СУБЛИМАТОР | 2022 |
|
RU2814171C1 |
| Система автоматического управления режимом сушки | 1981 |
|
SU954750A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА СУШКИ СЫПУЧИХ МАТЕРИАЛОВ | 1972 |
|
SU334462A1 |
| СПОСОБ ПЕРЕРАБОТКИ МИНЕРАЛЬНОГО И ТВЕРДОГО ОРГАНОСОДЕРЖАЩЕГО СЫРЬЯ МЕТОДОМ ПИРОЛИЗА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2260615C1 |
| Система автоматического управления режимом сушки | 1980 |
|
SU926473A1 |
| Устройство для автоматического управления процессом отгонки эфирных масел на непрерывно действующих перегонных аппаратах | 1980 |
|
SU960766A1 |
| СПОСОБ ВЫГРУЗКИ И ЗАГРУЗКИ СЫПУЧЕГО МАТЕРИАЛА ДЛЯ СОРТИРОВКИ, СУШКИ, ХРАНЕНИЯ, А ТАКЖЕ ДАЛЬНЕЙШЕЙ ПЕРЕРАБОТКИ И ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, ХРАНИЛИЩЕ СЫПУЧИХ МАТЕРИАЛОВ, СПОСОБ СУШКИ СЫПУЧИХ ПИЩЕВЫХ ПРОДУКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388886C2 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА УГОЛЬНЫХ БРИКЕТОВ ИЗ БИОМАССЫ | 2023 |
|
RU2807761C1 |
| Способ автоматического управления процессом приготовления композиции с последующей ее распылительной сушкой | 1989 |
|
SU1663352A1 |
| Мобильный комплекс по переработке промышленных нефтесодержащих отходов с помощью метода термической десорбции | 2021 |
|
RU2782208C1 |
Назначение: сушка материалов во вращающихся барабанных сушилках, автоматизация процесса производства сухого птичьего помета. Сущность: способ осуществляется с помощью устройства. Система автоматического управления работает по трехконтурной системе управления. Первый контур регулирования скорости подачи сырого материала во вращающийся барабан включает датчик 4 температуры, датчик 7 оборотов, блок управления (БУ), двигатель 12 шнека 13. В торой контур регулирования подачи теплоносителя в барабан включает теплогенератор 11 с перемещаемой заслонкой 10, концевые датчики 5,6 крайних положений заслонки 10, БУ, привод 15. Третий контур стабилизации уровня сырого материала включает накопительный бункер 19, подающий транспортер 17 с двигателем 16, БУ, датчики 8,9 верхнего и нижнего уровней сырого материала в подающем бункере 14 соответственно. Первый контур обеспечивает выход системы на предельно возможный режим загрузки сырого материала во вращающийся барабан, второй - стабилизацию заданной температуры материала на выходе барабана, При данном режиме нагрузки третий контур обеспечивает поддер- жание необходимого уровня сырого материала в подающем бункере. 2 с.п. ф-лы, 2 ил.
Л Формула изобретения
.рабане, содержащая контур регулирования скорости подачи сырого материала во вращающийся барабан, включающий датчик температуры внутри барабана, связанный через блок управления с приводом шнека подачи сырого: материала из .подающего бункера, о т л и ч а ю щ а я с я тем, что, с целью повышения производительности, она дополнительно оснащена накопительным бункером с расположенным под ним подающим транспортером, контуром стабилизации уровня сырого материала и контуром регулирования подачи теплоносителя, при этом .последний имеет датчики положения заслонок, установленные на входе во вращающийся барабан и связанные через блок управления с исполнительным, механизмом изменения положения заслонок, а контур стабилизации уровня сырого материала в подающем бункере снабжен датчиками верхнего и нижнего уровня, смонтированными на подающем бункере и связанными через блок управления с приводом подающего транспортера.
Редактор
Составитель Э.Пичугин Техред М.Моргентал
Фиг.1
Корректор М.Куль
| Способ автоматического регулирования процесса сушки сыпучих материалов | 1982 |
|
SU1019199A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Способ автоматического регулирования процесса сушки сыпучих материалов во вращающемся барабане и устройство для его осуществления | 1982 |
|
SU1041842A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Система автоматического управления режимом сушки | 1972 |
|
SU566108A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
