Изобретение относится к станкостроению, в частности для станков типа обрабатывающий, центр и автоматических линий со спутниками.
Целью изобретения является повышение точности установки и производительности.
Это достигается тем, что пальцы и соответствующие им отверстия выполнены в виде профильной кривой с равноосным контуром в поперечном сечении (РК-проф- иль) наружней и внутренней поверхности причем один из пальцев выполнен с нечетным количеством граней, а другой с четным количеством, причем пальцы установлены в плите с возможностью поворота вокруг своих осей.
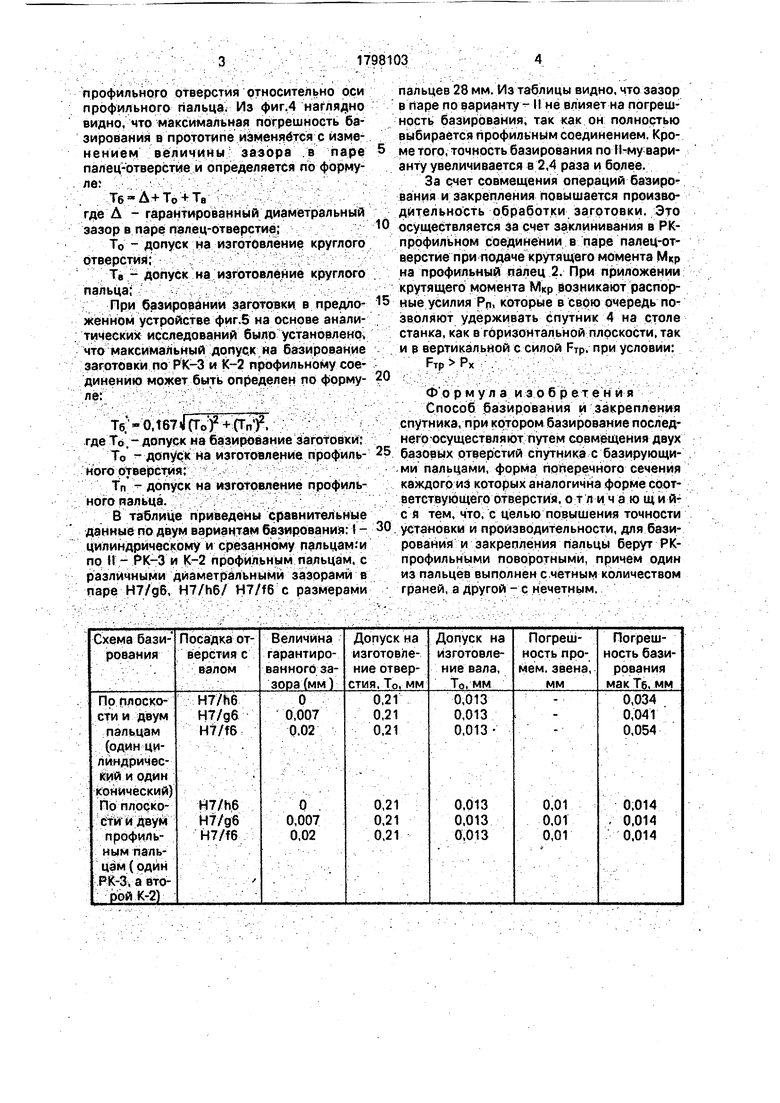
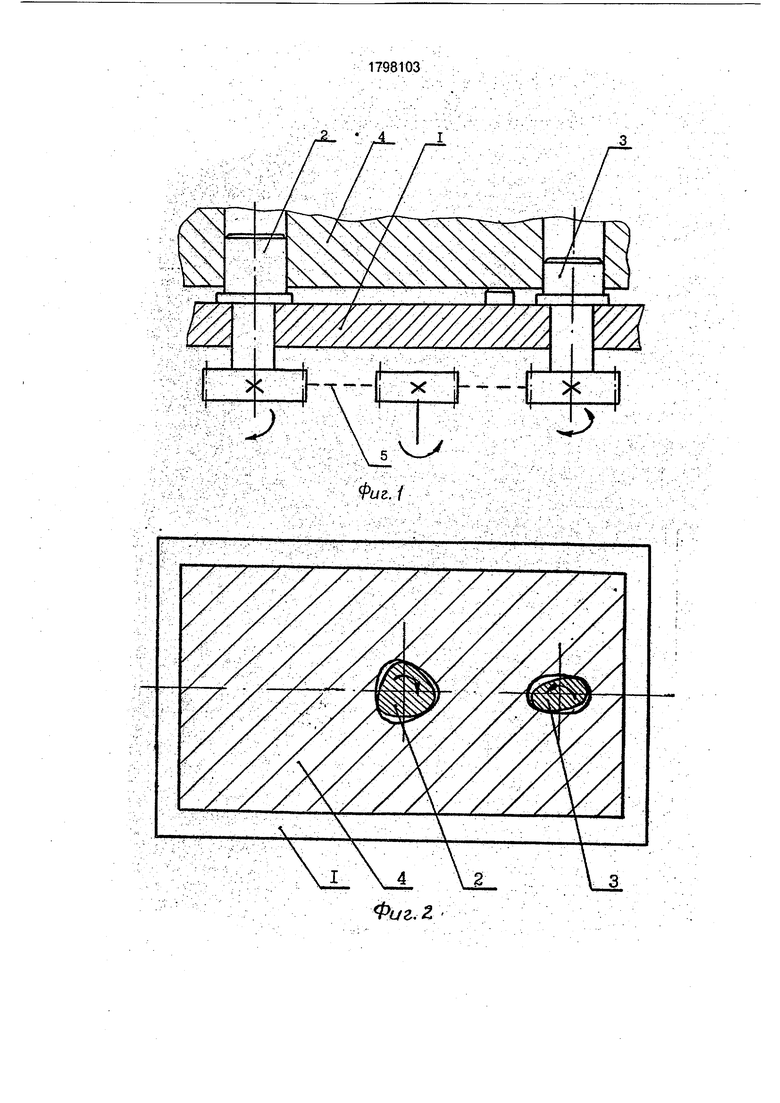
На фиг.1 представлена схема, реализующая способ базирования; на фиг.2 - схема реализации с 3-мя и 2-мя гранными пальцами; на фиг.З - схема реализации с 3-мя и 4-мя гранными пальцами; на фиг.4 - схема формирования погрешности базирования в прототипе; на фиг.5 - схема формирования погрешности базирования по предлагаемому способу; на фиг.6 - действие сил в паре палец-отверстие при приложении М«р; на фиг.7 - разрез А-А на фиг.б.
Способ базирования и закрепления спутника поясняется на фиг. t и 2, где на плите 1 установлены пальцы 2 и 3 с нечетным количеством граней, например РК-3 профилем, и четным количеством граней, К-2 профилем соответственно. В спутнике 4 имеются соответствующие гнезда под профильные пальцы 2 и 3. После установки спутника 4 на стол стднка фиксаторы 2 и 3 поворачивают относительно плиты 1 в раз- ные стороны с помощью педали 5, производя тем самым базирование и закрепление, спутника на столе станка.
Во времябазирования спутника относительно стола станка происходит поворот базирующих пальцев на требуемый угол, при этом происходит выборка зазора в трёх и двух точках соответственно. Контактные напряжения, возникающие в соединениях, приводят к самоустановке спутника 4 относительно профильных пальцев 2 и 3, совершая при этом точное центрирование оси
о
Ё
ХГ Ю 00
О
СА)
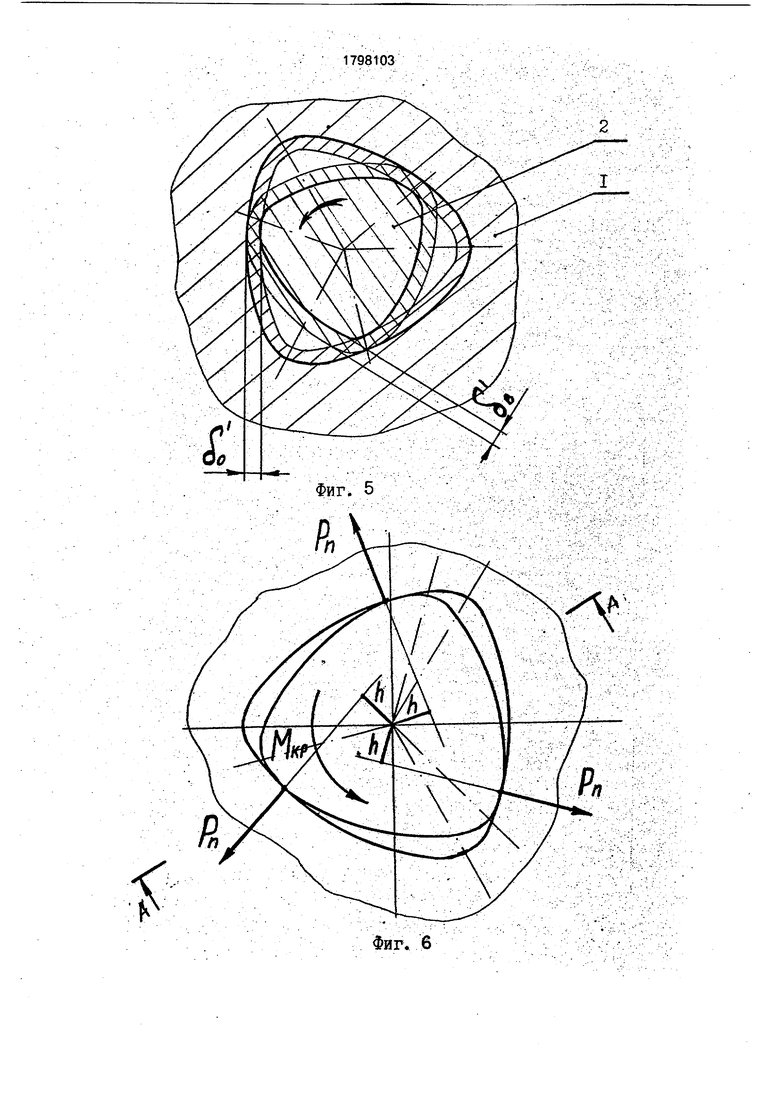
профильного отверстия относительно оси профильного пальца; Из фиг.4 наглядно видно, что максимальная погрешность базирования в прототипе изменяется с изменением величины; зазора в паре палец-отверстие и определяется по формуле: .. /:; V .:; ;: :.:: ;-.:;-v :/:;. ..
.: . Тб- Д+ То+ Та .;-: ; :-l - .J ;...: ; у - -; . ; где А - гарантированный диаметральный зазор в паре палец-отверстие;
То - допуск на изготовление круглого
отверстия; v .: ;-.. ;;-,S; --..--;-; --:;/ Те - допуск на изготовление круглого
пальца; :;-.. : ч , ;-:-;. :- ;: .. ..-. - ..;: При базировании заготовки в предложенном устройстве фиг.5 на основе аналитических исследований было установленр, что максимальный допуск на базирование заготовки по РК-3 и К-2 профильному соединению может быть определен по формуле: --v- -;v y:V - /:-- -:л; ,-. ;;.-;. . .
T6 Ute74(ГвТ+(Tnf, ;
где То - допуск на базирование заготовки;
То допус,)с на изготовление профиль- ногоотверстия: v Vv .-:-; v-./- ;.... -.;
Tn - допуск на изготовление профильного пальца. ,. ;: ;, -;V -::V:V.::-. ;;- :../ у V .
В таблице приведены сравнительные данные по двум вариантам базирования: I - цилиндрическому и срезанному пальцам- и по II - РК-3 и К-2 профильным пальцам, с различными диаметральными зазорами в паре Н7/дб, H7/h6/ H7/f6 с размерами
0
5
0
5
0
пальцев 28 мм. Из таблицы видно, что зазор в паре по варианту - И не влияет на погрешность базирования, так как он полностью .-выбирается профильным соединением. Кроме того, точность базирования по II-му варианту увел ичи вается в 2,4 раза и бол ее.
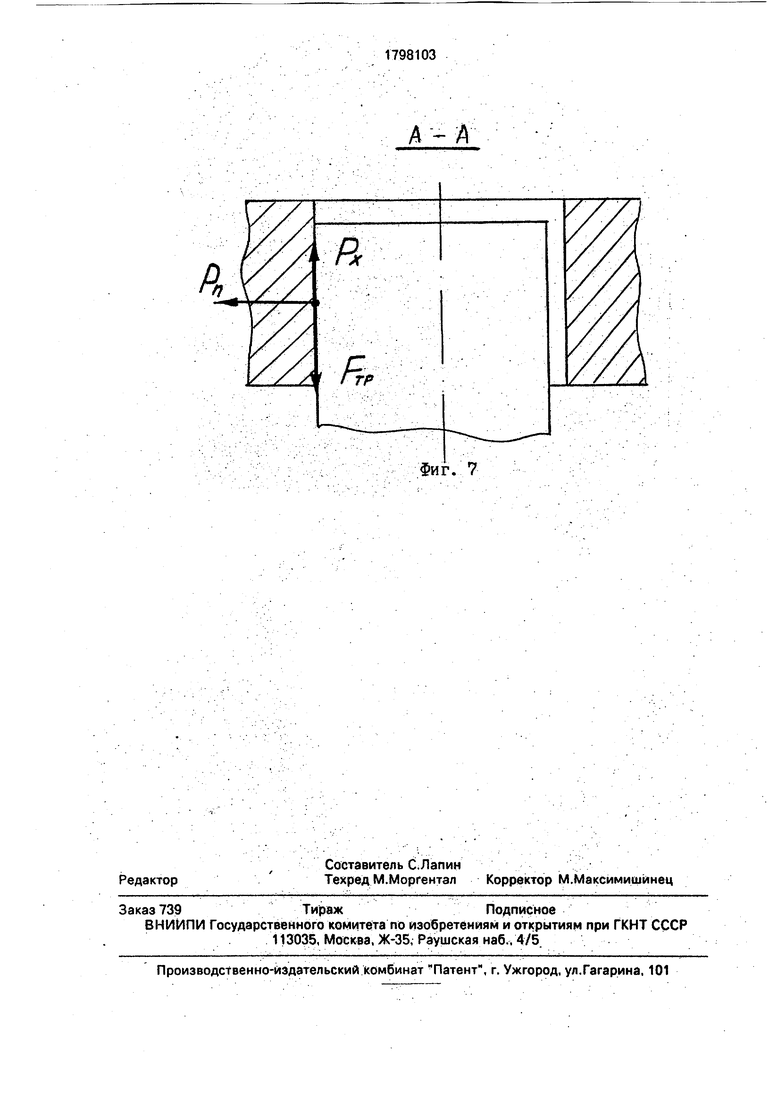
За счет совмещения операций базирования и закрепления повышается производительность обработки заготовки, Это осуществляется за счет заклинивания в РК- профильном соединении в паре палец-отверстие при подаче крутящего момента Мкр на профильный палец 2. При приложении крутящего момента Мкр возникают распорные усилия Рп, которые в очередь позволяют удерживать спутник 4 на столе станка, как в горизонтальной плоскости, так и э вертикальной с силой FTp, при условии:
. ;:;.; :.;- ,,.,.;. . ; ;
Ф ормула изобретения Способ базирования и закрепления спутника, при котором базирование последнего-осуществляют путем совмещения двух базовых отверстий спутника с базирующи- ми пальцами, форма поперечного сечения каждого из которых аналогична форме соответствующего отверстия, отличаю щ и й- с я тем, что, с целью повышения точности .установки и производительности, для базирований и закрепления пальцы берут РК- профильными поворотными, причем один из пальцев выполнен с.четным количеством граней, а другой-с нечетным.
Фиг. 4
Фиг. б
А - А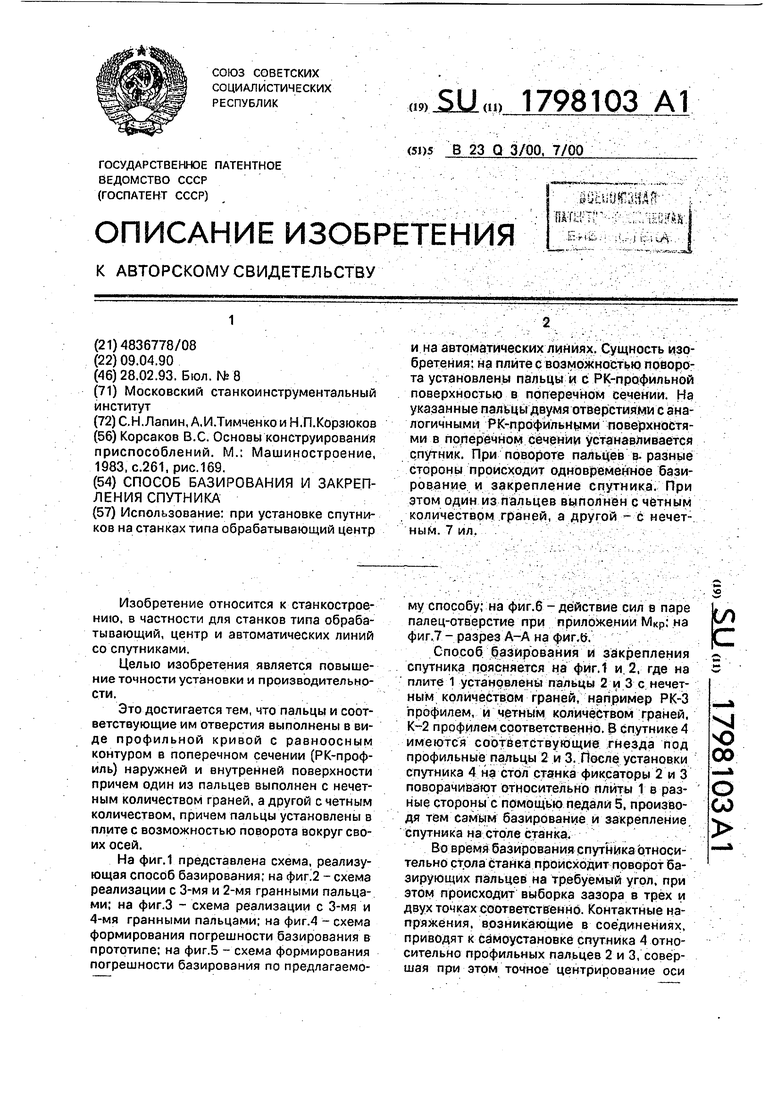
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БАЗИРОВАНИЯ СТОЛА-СПУТНИКА | 1993 |
|
RU2102217C1 |
| СПОСОБ МНОГОМЕСТНОЙ ИМПУЛЬСНОЙ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ ЛОПАТОК В СОСТАВЕ РОБОТИЗИРОВАННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2590743C1 |
| МНОГОМЕСТНОЕ ПРИСПОСОБЛЕНИЕ-СПУТНИК | 2003 |
|
RU2258593C2 |
| МНОГОЦЕЛЕВОЙ СТАНОК | 1993 |
|
RU2108219C1 |
| Устройство для шлифования профильных валов с равноосным контуром | 1983 |
|
SU1140937A1 |
| Приспособление-спутник | 1988 |
|
SU1609615A1 |
| СПОСОБ БАЗИРОВАНИЯ И КРЕПЛЕНИЯ СПУТНИКА И СТАНОК С ПЛАВАЮЩЕЙ СИСТЕМОЙ БАЗИРОВАНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2157307C2 |
| Гибкий производственный модуль | 1990 |
|
SU1824287A1 |
| СПОСОБ ЭЛЕКТРОХИМИЧЕСКОЙ РАЗМЕРНОЙ ОБРАБОТКИ ИЗДЕЛИЙ ИЗ ЛИСТОВОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2401725C2 |
| СПОСОБ УСТАНОВКИ ЗАГОТОВКИ ЛАПЫ БУРОВОГО ДОЛОТА ПРИ МЕХАНИЧЕСКОЙ ОБРАБОТКЕ НА МЕТАЛЛОРЕЖУЩИХ СТАНКАХ | 2009 |
|
RU2423215C2 |
Использование: при установке спутников на станках типа обрабатывающий центр и на автоматических линиях. Сущность изобретения; на плите с возможностью поворота установлены пальцы и с РК-профильной поверхностью в поперечном сечении. На указанные пальцы двумя отверстиями с аналогичными РК-прбфйльйыми поверхностями в поперечном сечении устанавливается спутник. При повороте пальцев в- разные стороны происходит одновременное базирование и закрепление спутника. При этом один из пальцев выполнен с четным количеством граней, а другой - с нечетным. 7 ил.
Фиг. 7
| Корсаков B.C | |||
| Основы конструирования приспособлений | |||
| М.: Машиностроение, 1983, с.261, рис.169. |
