1Z
13
Z
1
W
I
ю
а
X
СП
(35
тЗХТШ
и.
////7//7,
W/7
N)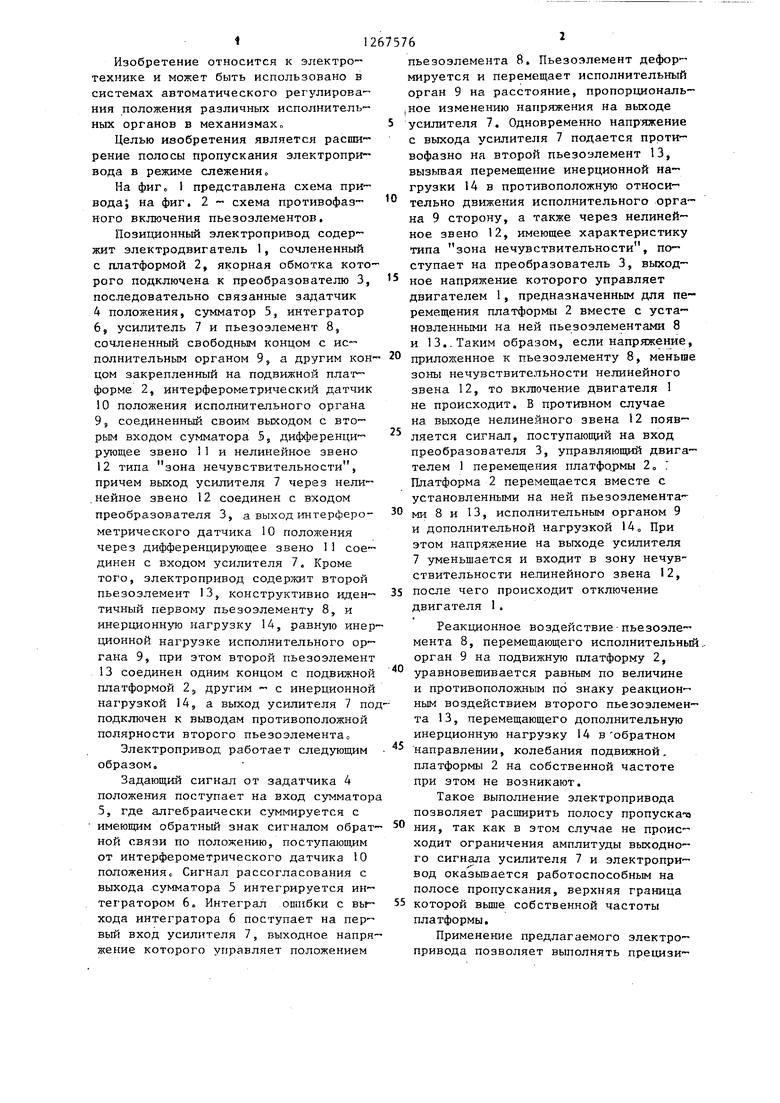
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электропривод | 1983 |
|
SU1164848A2 |
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Позиционный электропривод | 1984 |
|
SU1220096A2 |
| Следящий электропривод | 1990 |
|
SU1764031A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Позиционный электропривод | 1986 |
|
SU1403317A1 |
Изобретение относится к элект ротехнике и может быть использовано в системах автоматического регулиро™ вания положения и скорости различных исполнительных механизмов, например, при производстве интегральных Ш1кро- схем, волоконно-оптических изделий и т.По Расширение полосы пропускания в режиме гармонической заводки достигается за счет компенсации реакщш на платформу со стороны пьезоэлемента 8 и исполнительного органа 9 путем введения дополнительного конструктивно идентичного второго пьезозлемента 13 .с инерционной нагрузкой 14, равной инерционной нагрузке исполнительного органа, причем второй пьезозлемент подключен на выход преобразователя 7 противофазно первому пьезоэлементуо 8 S Изобретение дополнительное к авТо св. (Л № 1064409, 1 ил.
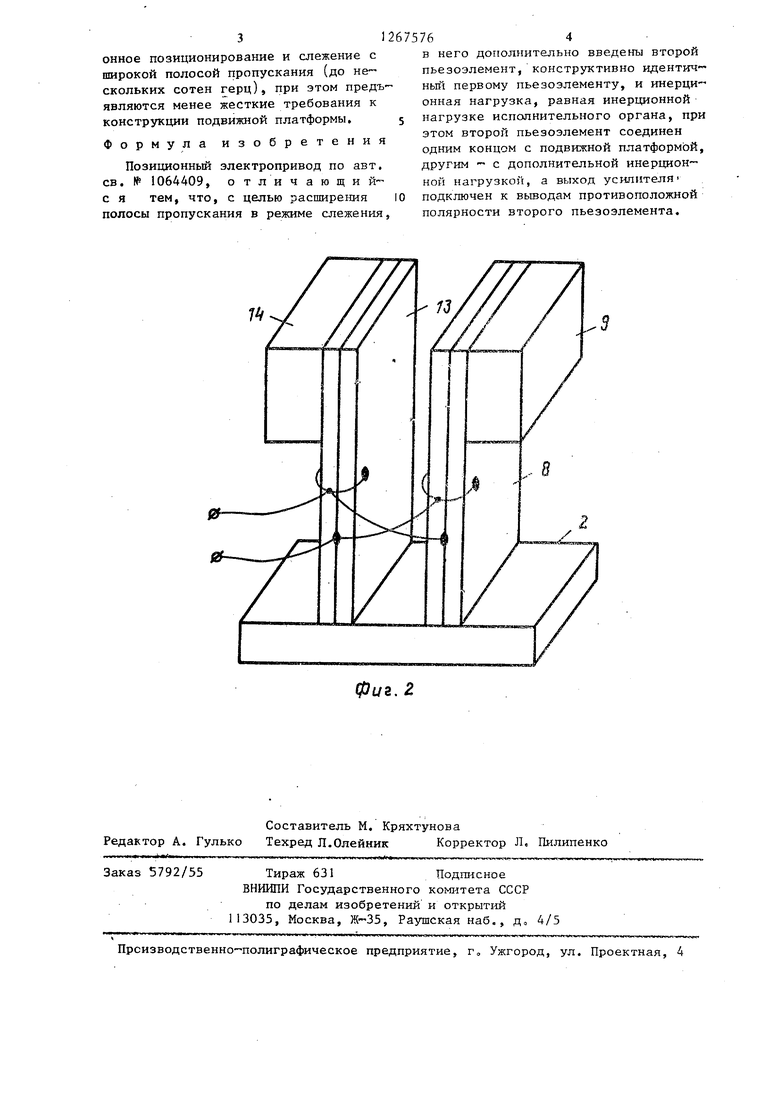
фиг. / Изобретение относится к электро технике и может быть использовано в системах автоматического регулирования положения различных исполнительных органов в механизмах Целью изобретения является расшн- рение полосы пропускания электропри™ вода в режиме слежения На фиг 1 представлена схема привода; на фиг, 2 схема противофазного включения пьезоэлементов. Позиционньй электропривод содержит электродвигатель 1, сочлененный с платформой 2, якорная обмотка кото рого подключена к преобразователю 3, последовательно связанные задатчик 4 положения, сумматор 5, интегратор 6, усилитель 7 и пьезоэлемент 8, сочлененный свободным концом с исполнительным органом 9, а другим кон цом закрепленный на подвижной платформе 2, интерферометрический датчик 10 положения исполнительного органа 9, соединенный своим выходом с вторым входом сумматора 5, дифференцирующее звено 11 и нелинейное звено 12типа зона нечувствительности, причем выход усилителя 7 через нели- ,нейное звено 12 соединен с входом преобразователя 3, а выход интерферометрического датчика Ю положения через дифференцирующее звено 11 соединен с входом усилителя 7. Кроме того, электропривод содержит второй пьезозлемент 13, конструктивно идентичный первому пьезоэлементу 8, и инерционную нагрузку 14, равную инер ционной нагрузке исполнительного органа 9, при этом второй пьезоэлемент 13соединен одним концом с подвижной платформой 2, другим - с инерционной нагрузкой 14 5 а выход усилителя 7 по подключен к выводам противоположной полярности второго пьезоэлементас Электропривод работает следующим образом. Задающий сигнал от задатчика 4 положения поступает на вход сумматор 5, где алгебраически суммируется с имеющим обратный знак сигналом обрат ной связи по положению, поступающим от интерферометрического датчика 10 положения Сигнал рассогласования с вькода сумматора 5 интегрируется интегратором 6. Интеграл ошибки с выхода интегратора 6 поступает на первый вход усилителя 7, выходное напря жение которого управляет положением 12 6 пьезоэлемента 8. Пьезоэлемент деформируется и перемещает исполнительный орган 9 на расстояние, пропорциональное изменению напряжения на выходе усилителя 7. Одновременно напр-яжение с выхода усилителя 7 подается прртивофазно на второй пьезоэлемент 13, вызьгеая перемещение инерционной нагрузки 14 в противоположную относительно движения исполнительного органа 9 сторону, а также через нелинейное звено 12, имеющее характеристику типа зона нечувствительности, поступает на преобразователь 3, выходное напряжение которого управляет двигателем 1, предназначенным для пе ремещения платформы 2 вместе с установленными на ней пьезоэлементами 8 и 13..Таким образом, если напряжение, приложенное к пьезоэлементу 8, меньше зоны нечувствительности нелинейного звена 12, то включение двигателя 1 не происходит. В противном случае на выходе нелинейного звена 12 появляется сигнал, поступающий на вход преобразователя 3, управляющий двигателем 1 перемещения платформы 2 Платформа 2 перемещается вместе с установленными на ней пьезоэлемента-ми 8 и 13, исполнительным органом 9 и дополнительной нагрузкой 14„ При этом напряжение на выходе усилителя 7 уменьшается и входит в зону нечувствительности нелинейного звена 12, после чего происходит отключение двигателя 1. Реакционное воздействие-пьезоэле- мента 8, перемеш,ающего исполнительный, орган 9 на подвижную платформу 2, уравновешивается равным по величине и противоположным по знаку реакционным воздействием второго пьезоэлемен- та 13, перемещающего дополнительную инерционную нагрузку 14 вобратном направлении, колебания подвижной, платформы 2 на собственной частоте при этом не возникают. Такое выполнение электропривода позволяет расширить полосу пропуска-ч ния, так как в этом случае не происходит ограничения амплитуды выходного сигнала усилителя 7 и электропривод оказывается работоспособным на полосе пропускания, верхняя граница которой вьше собственной частоты платформы. Применение предлагаемого электропривода позволяет выполнять прецизи- онное позиционирование и слежение с широкой полосой пропускания (до нескольких сотен герц), при этом предъявляются менее жесткие требования к конструкции подвижной платформы. Формула изобретения Позиционный электропривод по авт. св. № 1064409, отличающий- с я тем, что, с целью расширения полосы пропускания в режиме слежения. 267 5 10 764 в него дополнительно введены второй пьезоэлемент, конструктивно идентичньш первому пьезоэлененту, и инерци-онная нагрузка, равная инерционной нагрузке исполнительного органа, при этом второй пьезоэлемент соединен одним концом с подвижной платформой, другим - с дополнительной инерционной нагрузкой, а выход усилителя подключен к выводам противоположной полярности второго пьезоэлемента.
Фиг, 2
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
