7. Механизмы перемещения основания и каретки выполнены на основе тросо-блоч- ной системы, состоящей из основного и дополнительного барабанов, несущих основной 31 и дополнительный 32 тросы, концы которых закреплены на противоположных концах каретки 6. Барабаны кинематически взаимодействуют между собой посредством двух параллельно расположенных ветвей зубчатых передач, ведущие зубчатые колеса которых представляют единый двухвенцовый блок, установленный со- осно основному барабану, а ведомые зубчатые колеса этих передач имеют участки с вырезанными зубьями и установлены
соосно дополнительному барабану. Один из зубчатых венцов двухвенцового блока связан с соответствующим ведомым зубчатым колесом посредством дополнительно введенного промежуточного колеса. Направляющие 2 в месте их соединения с основанием 1 соединены с. последним посредством шарнира, а между основанием 1 и направляющими 2 установлена регулируемая по длине тяга 10, выполненная в виде винта 11, имеющего два участка разного направления резьбы и взаимодействующего с тяговыми втулками 12 и 13, соединенными соответственно с направляющими и основанием посредством шаровых опор. 3 ил.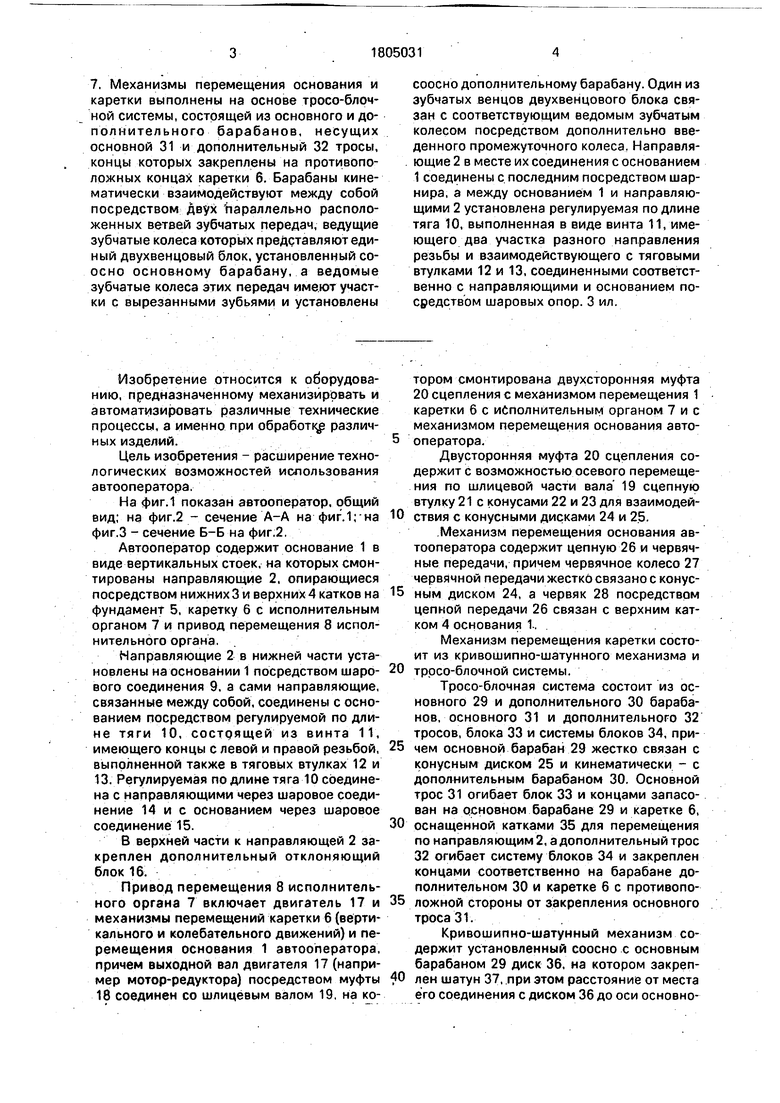
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1989 |
|
SU1710338A1 |
| Автооператор | 1987 |
|
SU1548006A1 |
| Установка для полирования плоских поверхностей | 1991 |
|
SU1779550A1 |
| Автооператор | 1991 |
|
SU1805030A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2381099C2 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| УНИВЕРСАЛЬНАЯ УПРАВЛЯЕМАЯ РЕМИЗОПОДЪЕМНАЯ КАРЕТКА | 1996 |
|
RU2109863C1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| ТЯГОВАЯ РЕВЕРСИВНАЯ ЛЕБЕДКА | 2006 |
|
RU2301194C1 |
Использование: в оборудовании, предназначенном для механизации и автоматизации различных технологических процессов. В направляющих 2 установлена каретка 6 с исполнительным органом, привод перемещения исполнительного органа /
Изобретение относится к оборудованию, предназначенному механизировать и автоматизировать различные технические процессы, а именно при обработку различных изделий.
Цель изобретения - расширение технологических возможностей использования автооператора.
На фиг.1 показан автооператор, общий вид; на фиг.2 - сечение А-А на фиг.1гна фиг.З - сечение Б-Б на фиг.2.
Автооператор содержит основание 1 в виде вертикальных стоек, на которых смонтированы направляющие 2, опирающиеся посредством нижних 3 и верхних 4 катков на фундамент 5, каретку 6 с исполнительным органом 7 и привод перемещения 8 исполнительного органа.
Направляющие 2 в нижней части установлены на основании 1 посредством шарового соединения 9, а сами направляющие, связанные между собой, соединены с основанием посредством регулируемой по длине тяги 10, состоящей из винта 11, имеющего концы с левой и правой резьбой, выполненной также в тяговых втулках 12 и 13. Регулируемая по длине тяга 10 соединена с направляющими через шаровое соединение 14 и с основанием через шаровое соединение 15.
В верхней части к направляющей 2 закреплен дополнительный отклоняющий блок 16.
Привод перемещения 8 исполнительного органа 7 включает двигатель 17 и механизмы перемещений каретки 6 (вертикального и колебательного движений) и перемещения основания 1 автооператора, причем выходной вал двигателя 17 (например мотор-редуктора) посредством муфты 18 соединен со шлицевым валом 19, на котором смонтирована двухсторонняя муфта 20 сцепления с механизмом перемещения 1 каретки 6 с исполнительным органом 7 и с механизмом перемещения основания автооператора.
Двусторонняя муфта 20 сцепления содержит с возможностью осевого перемещения по шлицевой части вала 19 сцепную втулку 21 с конусами 22 и 23 для взаимодействия с конусными дисками 24 и 25.
.Механизм перемещения основания автооператора содержит цепную 26 и червячные передачи, причем червячное колесо 27 червячной передачи жестки связано с конусным диском 24, а червяк 28 посредством цепной передачи 26 связан с верхним катком 4 основания 1.. ..
Механизм перемещения каретки состоит из кривошипно-шатунного механизма и
тррсо-блочной системы.
Тросо-блочная система состоит из основного 29 и дополнительного 30 барабанов, основного 31 и дополнительного 32 тросов, блока 33 и системы блоков 34, причем основной барабан 29 жестко связан с конусным диском 25 и кинематически - с дополнительным барабаном 30. Основной трос 31 огибает блок 33 и концами запасо- ван на основном барабане 29 и каретке 6,
оснащенной катками 35 для перемещения по направляющим 2, а дополнительный трос 32 огибает систему блоков 34 и закреплен концами соответственно на барабане дополнительном 30 и каретке 6 с противоположной стороны от закрепления основного троса 31.
Кривошипно-шатунный механизм содержит установленный соосно с основным барабаном 29 диск 36, на котором закреплен шатун 37, при этом расстояние от места его соединения с диском 36 до оси основного барабана 29 определяет радиус кривошипа. Другой конец шарнира 37 шарнирно соединен с коромыслом 38, закрепленным шарнирно на основании 1, противоположный конец которого несет на себе ось 39 с блоком 33.
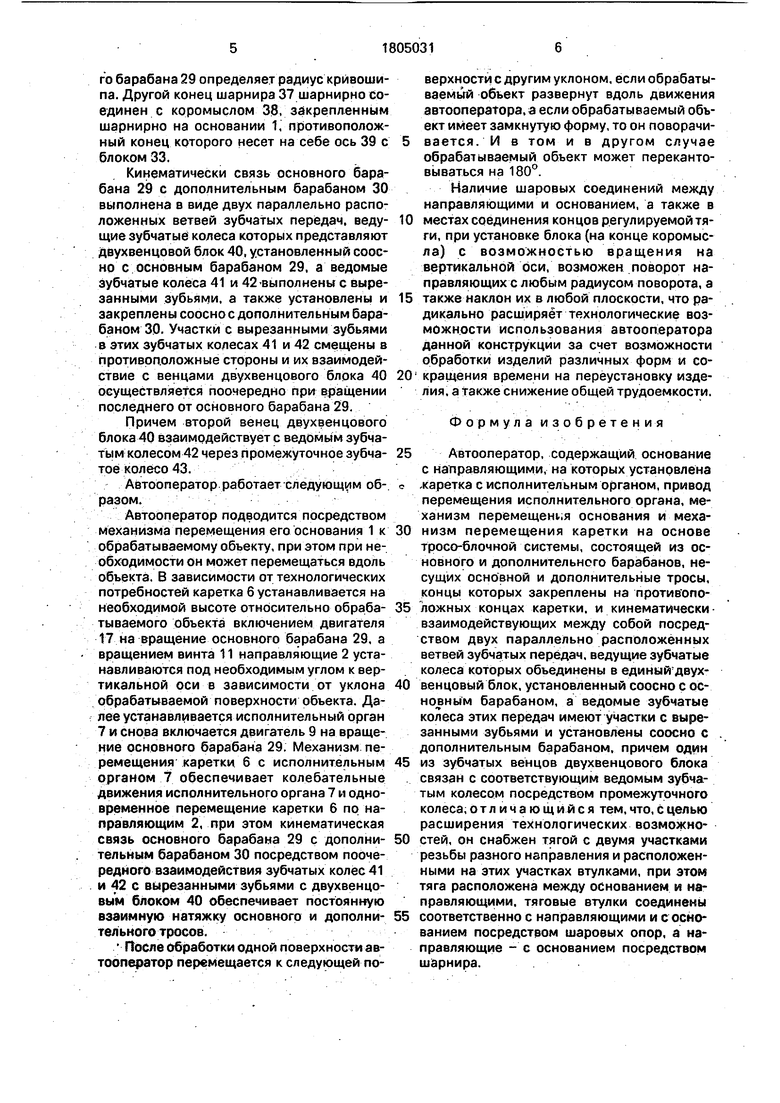
Кинематически связь основного барабана 29 с дополнительным барабаном 30 выполнена в виде двух параллельно расположенных ветвей зубчатых передач, ведущие зубчатые колеса которых представляют двухвенцовой блок 40, установленный соос- но с основным барабаном 29, а ведомые Зубчатые колеса 41 и 42-выполнены с вырезанными зубьями, а также установлены и закреплены соосно с дополнительным барабаном 30. Участки с вырезанными зубьями в этих зубчатых колесах 41 и 42 смещены в противоположные стороны и их взаимодействие с венцами двухвенцового блока 40 осуществляется поочередно при вращении Последнего от основного барабана 29.
Причем второй венец двухвенцового блока 40 взаимодействует с ведомым зубчатым колесом 42 через промежуточное зубчатое колесо 43.
Автооператор работает следующим об-, разом.
Автооператор подводится посредством Механизма перемещения его основания 1 к обрабатываемому объекту, при этом при необходимости он может перемещаться вдоль объекта. В зависимости от технологических потребностей каретка 6 устанавливается на необходимой высоте относительно обрабатываемого объекта включением двигателя 17 на вращение основного барабана 29, а вращением винта 11 направляющие 2 устанавливаются под необходимым углом к вертикальной оси в зависимости от уклона обрабатываемой поверхности объекта. Далее устанавливается исполнительный орган 7 и снова включается двигатель 9 на вращение основного барабана 29. Механизм перемещения каретки 6 с исполнительным органом 7 обеспечивает колебательные движения исполнительного органа 7 и одновременное перемещение каретки 6 по направляющим 2, при этом кинематическая связь основного барабана 29 с дополнительным барабаном 30 посредством поочередного взаимодействия зубчатых колес 41 и 42 с вырезанными зубьями с двухвенцо- вым блоком 40 обеспечивает постоянную взаимную натяжку основного и дополнительного тросов.
После обработки одной поверхности автооператор перемещается к следующей поверхности с другим уклоном, если обрабатываемый объект развернут вдоль движения автооператора, а если обрабатываемый объект имеет замкнутую форму, то он поворачивается. И в том и в другом случае обрабатываемый объект может перекантовываться на 180°.
Наличие шаровых соединений между направляющими и основанием, а также в
местах соединения концов регулируемой тяги, при установке блока (на конце коромысла) с возможностью вращения на вертикальной оси, возможен поворот направляющих с любым радиусом поворота, а
также наклон их в любой плоскости, что радикально расширяет технологические возможности использования автооператора данной конструкции за счет возможности обработки изделий различных форм и сокращения времени на переустановку изделия, а также снижение общей трудоемкости.
Формула изобретения
Автооператор, содержащий основание с направляющими, на которых установлена
жаретка с исполнительным органом, привод перемещения исполнительного органа, механизм перемещения основания и механизм перемещения каретки на основе тросо-блочной системы, состоящей из основного и дополнительного барабанов, несущих основной и дополнительные тросы, концы которых закреплены на против оположных концах каретки, и кинематически- взаимодействующих между собой посредством двух параллельно расположённых ветвей зубчатых передач, ведущие зубчатые колеса которых объединены в единый двухвенцовый блок, установленный соосно с основным барабаном, а ведомые зубчатые колеса этих передач имеют участки с вырезанными зубьями и установлены соосно с дополнительным барабаном, причем один
из зубчатых венцов двухвенцового блока связан с соответствующим ведомым зубчатым колесом посредством промежуточного колеса, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен тягой с двумя участками резьбы разного направления и расположенными на этих участках втулками, при этом тяга расположена между основанием и направляющими, тяговые втулки соединены
соответственно с направляющими и с основанием посредством шаровых опор, а направляющие - с основанием посредством шарнира.
Фиг.5
Редактор
Составитель Н.Дьяконов Техред М.Моргентал
Корректор О.Густи
| Авторское свидетельство СССР | |||
| Автооператор | 1989 |
|
SU1710338A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
