(Л
С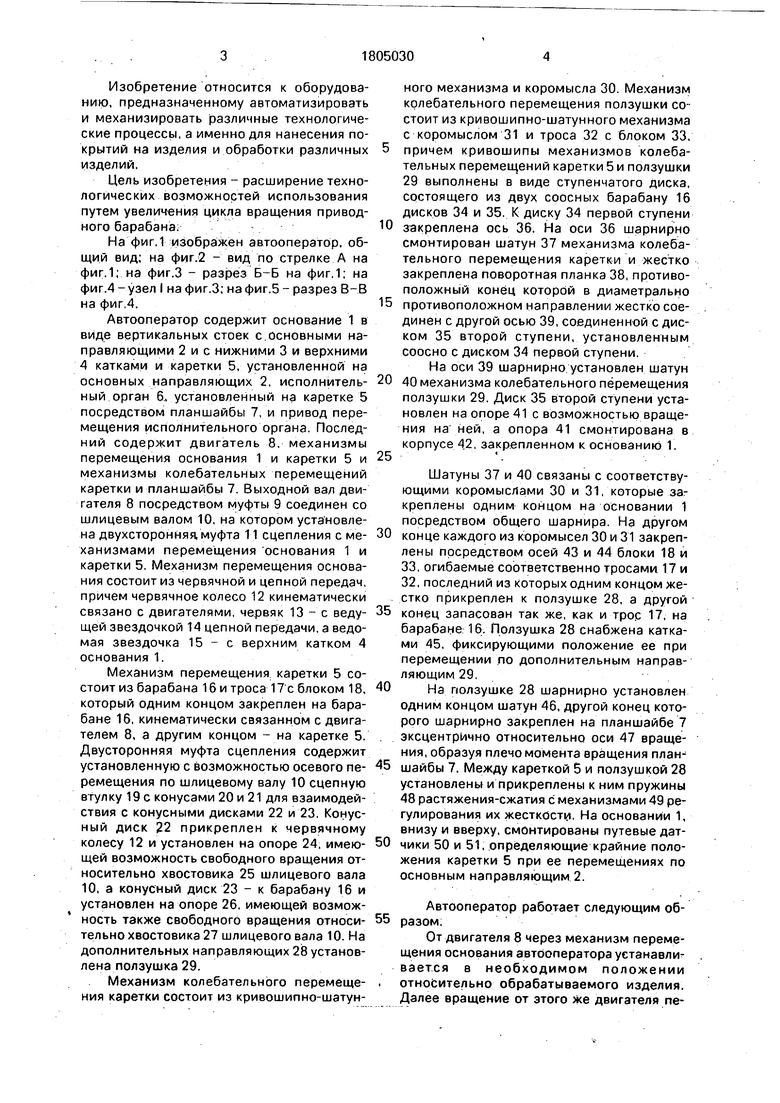
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1987 |
|
SU1548006A1 |
| Автооператор | 1991 |
|
SU1805031A1 |
| Автооператор | 1989 |
|
SU1710338A1 |
| Установка для окраски крупногабаритных изделий | 1990 |
|
SU1720739A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Установка для полирования плоских поверхностей | 1991 |
|
SU1779550A1 |
| Установка для нанесения растрового рельефа на матрицу | 1972 |
|
SU568929A1 |
| Устройство для сварки продольных и кольцевых швов труб и трубных пересечений | 1960 |
|
SU139753A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1990 |
|
SU1731372A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1982 |
|
SU1062542A1 |
Использование: для автоматизации и механизации различных- технологических процессов, а именно для нанесения покрытий на изделия и обработки различных изделий. Механизм перемещения каретки выполнен в виде приводного барабана 16, связанного через тросо-блочную систему с кареткой, а также с диском 34 кривошипно- . шатунного механизма колебательных движений этой каретки. Прлзушка также имеет кривошипно-шатунный механизм ее колебательных движений, в котором кривошип выполнен в виде диска 35. Диски 34 и 35 соединены в диаметрально противоположных направлениях посредством планки 38, имеющей жестко закрепленные на ней две оси 36 и 39, причем ось 36 соединяет планку 38 с шатуном 37 и с диском 34, а ось 39 - с шатуном 40 и с диском 35, имеющим воз - можность вращения в опоре 41, установленной на основании 1.-5 ил.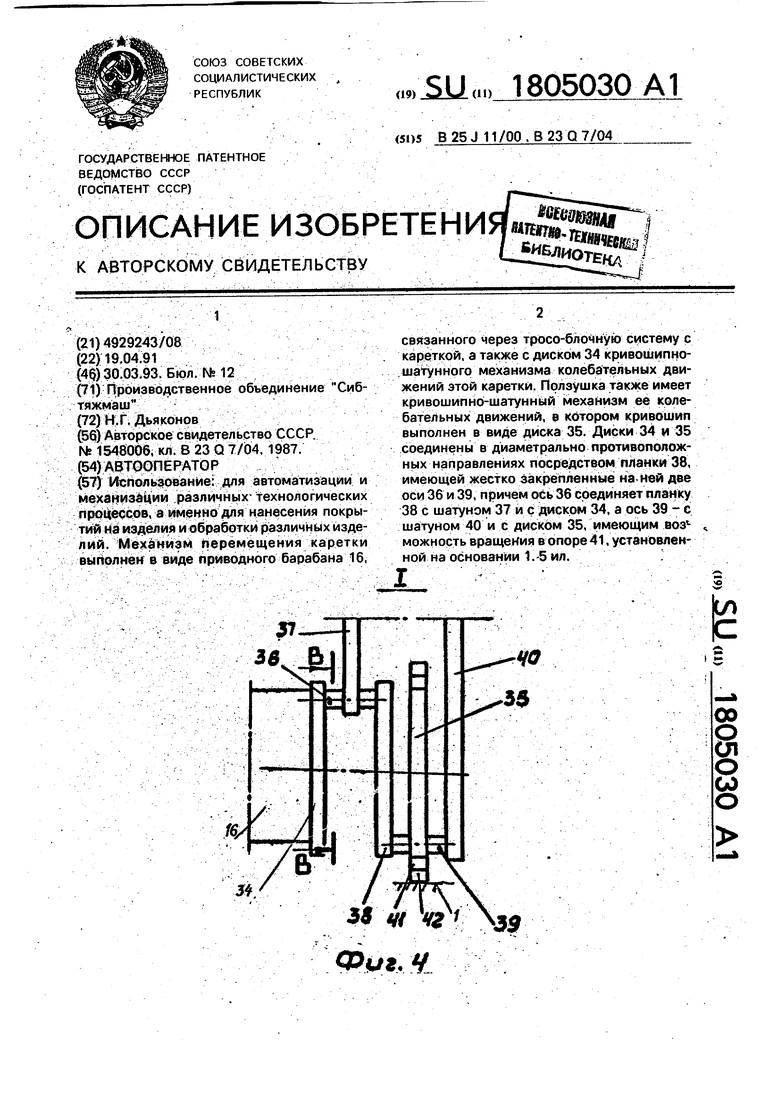
з iff V/
Р./г, Ч
00
о ел о
00
о
Ъ$
Изобретение относится к оборудованию, предназначенному автоматизировать и механизировать различные технологические процессы, а именно для нанесения покрытий на изделия и обработки различных изделий.
Цель изобретения - расширение технологических возможностей использования путем увеличения цикла вращения приводного барабана.
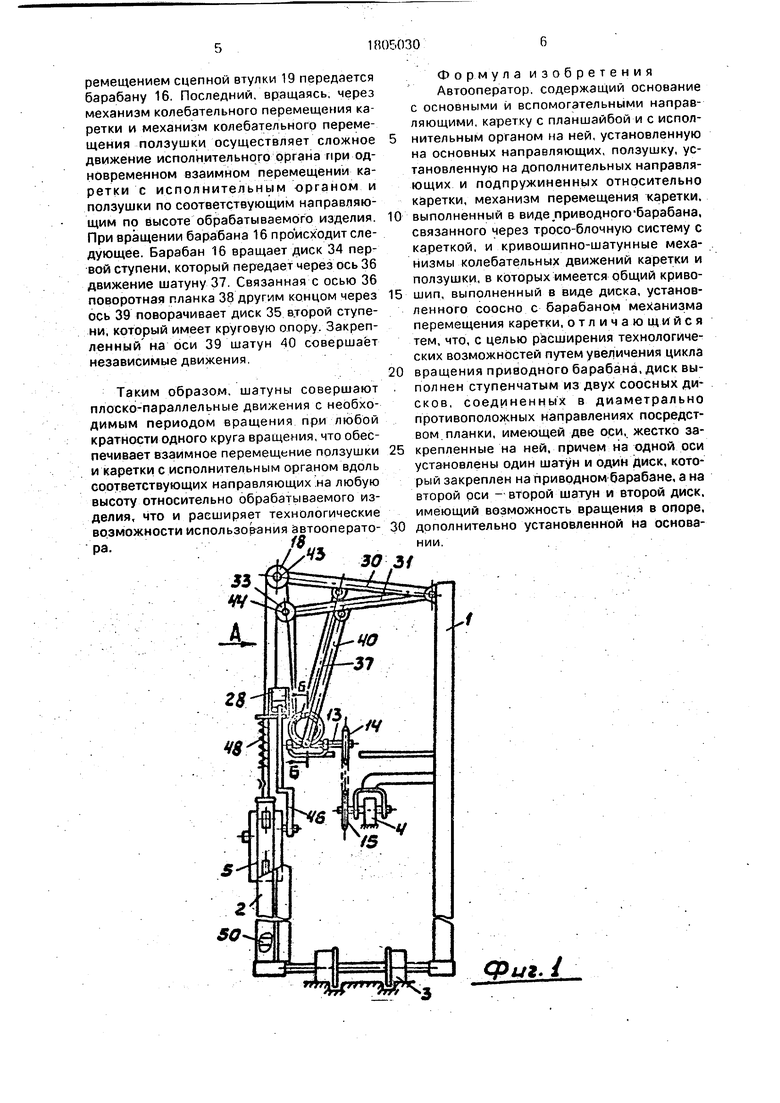
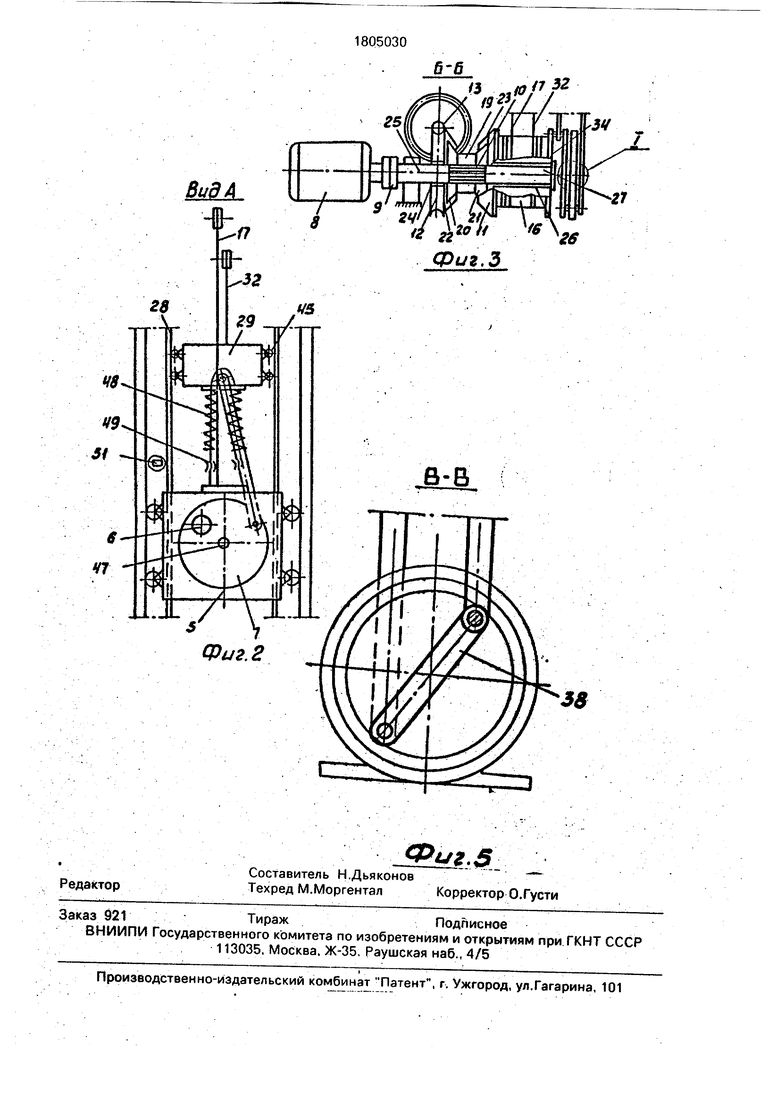
На фиг.1 изображен автооператор, общий вид; на фиг.2 - вид по стрелке А на фиг.1;. на фиг.З - разрез Б-Б на фиг.1; на фиг.4 -узел I на фиг.З; на фиг.5 - разрез В-В на фиг.4.
Автооператор содержит основание 1 в виде вертикальных стоек с основными направляющими 2 и с нижними 3 и верхними 4 катками и каретки 5, установленной на основных направляющих 2, исполнительный орган 6., установленный на каретке 5 посредством планшайбы 7, и привод перемещения исполнительного органа. Последний содержит двигатель 8, механизмы перемещения основания 1 и каретки 5 и механизмы колебательных перемещений каретки и планшайбы 7. Выходной вал двигателя 8 посредством муфты 9 соединен со шлицевым валом 10, на котором уста новле- на двухсторонняя муфта 11 сцепления с механизмами перемещения основания 1 и каретки 5. Механизм перемещения основания состоит из червячной и цепной передач, причем червячное колесо 12 кинематически связано с двигателями, червяк 13 - с ведущей звездочкой 14 цепной передачи, а ведомая звездочка 15 - с верхним катком 4 основания 1.
Механизм перемещения каретки 5 состоит из барабана 16 и троса 17 с блоком 18, который одним концом закреплен на барабане 16, кинематически связанном с двигателем 8, а другим концом - на каретке 5. Двусторонняя муфта сцепления содержит установленную с возможностью осевого перемещения по шлицевому валу 10 сцепную втулку 19с конусами 20 и 21 для взаимодействия с конусными дисками 22 и 23. Конусный диск 22 прикреплен к червячному колесу 12 и установлен на опоре 24, имеющей возможность свободного вращения относительно хвостовика 25 шлицевого вала 10, а конусный диск 23 - к барабану 16 и установлен на опоре 26, имеющей возможность также свободного вращения относительно хвостовика 27 шлицевого вала 10. На дополнительных направляющих 28 установлена ползушка 29.
Механизм колебательного перемещения каретки состоит из кривошипно-шатунного механизма и коромысла 30. Механизм колебательного перемещения ползушки состоит из кривошипно-шатунного механизма с коромыслом 31 и троса 32 с блоком 33,
причем кривошипы механизмов колебательных перемещений каретки 5 и ползушки 29 выполнены в виде ступенчатого диска, состоящего из двух соосных барабану 16 дисков 34 и 35. К диску 34 первой ступени
з-акреплена ось 36. На оси 36 шарнирно смонтирован шатун 37 механизма колебательного перемещения каретки и жестко закреплена поворотная планка 38. противоположный конец которой в диаметрально
противоположном направлении жестко соединен с другой осью 39, соединенной с диском 35 второй ступени, установленным соосно с диском 34 первой ступени.
На оси 39 шарнирно установлен шатун
40 механизма колебательного перемещения ползушки 29. Диск 35 второй ступени установлен на опоре 41 с возможностью вращения на ней, а опора 41 смонтирована в корпусе 42.закрепленном к основанию 1.
Шатуны 37 и 40 связаны с соответствующими коромыслами 30 и 31, которые закреплены одним концом на основании 1 посредством общего шарнира. На другом
конце каждого из коромысел 30 и 31 закреплены посредством осей 43 и 44 блоки 18 и 33, огибаемые соответственно тросами 17 и 32, последний из которых одним концом жестко прикреплен к ползушке 28, а другой
конец запасован так же, как и трос 17, на барабане 16. Ползушка 28 снабжена катками 45, фиксирующими положение ее при перемещении .по дополнительным направляющим 29.
На ползушке 28 шарнирно установлен одним концом шатун 46, другой конец которого шарнирно закреплен на планшайбе 7 эксцентрично относительно оси 47 вращения, образуя плечо момента вращения план
шайбы 7. Между кареткой 5 и ползушкой 28 установлены и прикреплены к ним пружины 48 растяжения-сжатия с механизмами 49 регулирования их жесткости. На основании 1, внизу и вверху, смонтированы путевые датчики 50 и 51, определяющие крайние положения каретки 5 при ее перемещениях по основным направляющим 2.
Автооператор работает следующим об- разом.
От двигателя 8 через механизм перемещения основания автооператора устанавливается в необходимом положении относительно обрабатываемого изделия. Далее вращение от этого же двигателя перемещением сцепной втулки 19 передается барабану 16. Последний, вращаясь, через механизм колебательного перемещения каретки и механизм колебательного перемещения ползушки осуществляет сложное движение исполнительного органа при одновременном взаимном перемещении каретки с исполнительным органом и ползушки по соответствующим направляющим по высоте обрабатываемого изделия. При вращении барабана 16 происходит следующее. Барабан 16 вращает диск 34 первой ступени, который передает через ось 36 движение шатуну 37. Связанная с осью 36 поворотная планка 38 другим концом через ось 39 поворачивает диск 35 второй ступени, который имеет круговую опору. Закрепленный на оси 39 шатун 40 совершает независимые движения.
Таким образом, шатуны совершают плоско-параллельные движения с необходимым периодом вращения при любой кратности одного круга вращения, что обеспечивает взаимное перемещение ползушки и каретки с исполнительным органом вдоль соответствующих направляющих на любую высоту относительно обрабатываемого изделия, что и расширяет технологические возможности использования автооператора,/8t
30 S3 у.
Формула изобретения Автооператор, содержащий основание с основными и вспомогательными направляющими, каретку с планшайбой и с испол- нительным органом на ней, установленную на основных направляющих, ползушку, установленную на дополнительных направляющих и подпружиненных относительно каретки, механизм перемещения каретки,
выполненный в виде/фиводного-барабана, связанного через тросо-блочную систему с кареткой, и кривошипно-шатунные механизмы колебательных движений каретки и ползушки, в которых имеется общий кривошип, выполненный в виде диска, установленного соосно с барабаном механизма перемещения каретки, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения цикла
вращения приводного барабана, диск выполнен ступенчатым из двух соосных дисков, соединенных в диаметрально противоположных направлениях посредством, планки, имеющей две оси, жестко закрепленные на ней, причем на одной оси установлены один шатун и один диск, который закреплен на приводном барабане, а на второй оси --второй шатун и второй диск, имеющий возможность вращения в опоре,
дополнительно установленной на основании.
Редактор
Составитель Н.Дьяконов
Техред М.МоргенталКорректор О.Густи
Фиг .5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
