лолнены в виде двухвенцового блока 32, установленного соосно основному барабану 21, а ведомые зубчатые колеса 33 и 34 этих же ветвей имбют участки с вырезанными зубьями и смонтированы соосно дополнительному барабану 22. Кроме того, вторая ветвь зубчатых передач включает промежуточное зубчатое колесо 35, связывающее зубчатый венец двухвенцового блока 32 с ведомым зубчатым колесом. 3 ил.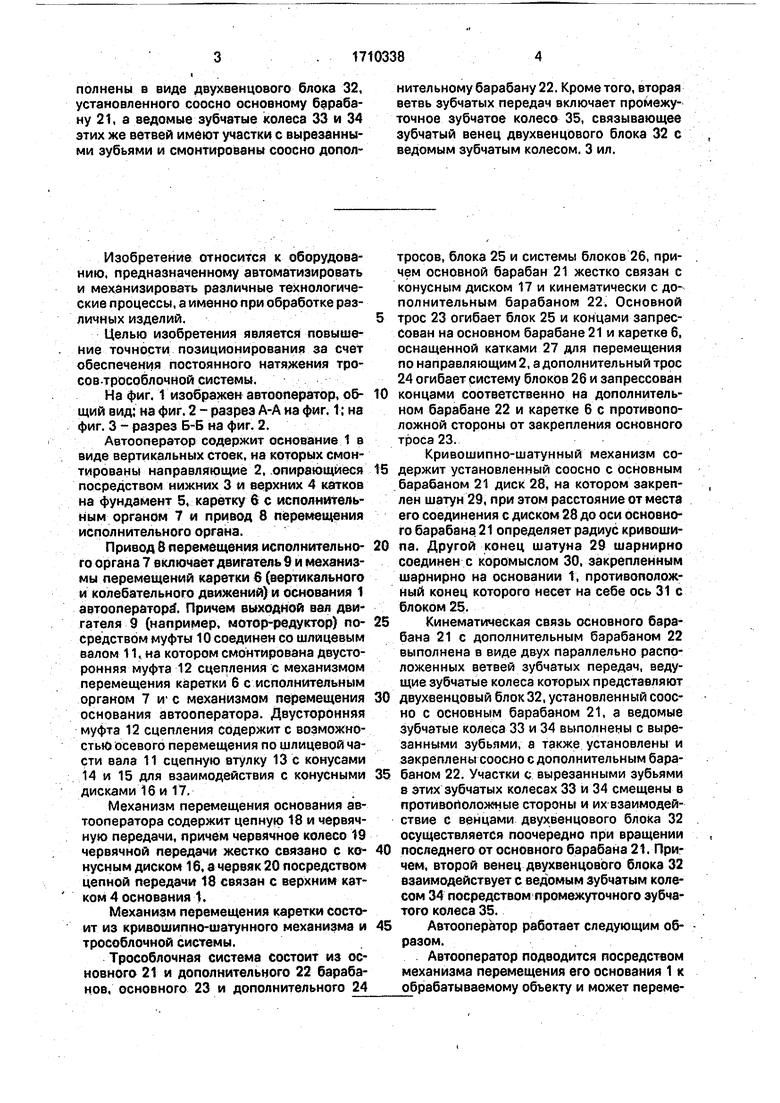
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1991 |
|
SU1805031A1 |
| Установка для полирования плоских поверхностей | 1991 |
|
SU1779550A1 |
| Автооператор | 1987 |
|
SU1548006A1 |
| Автооператор | 1991 |
|
SU1805030A1 |
| Устройство для продвижения бревен по воде | 1987 |
|
SU1474060A1 |
| Механизм подачи канатно-цепной пилы | 1980 |
|
SU935613A1 |
| Устройство для многоколенной пространственной гибки труб | 1985 |
|
SU1268245A1 |
| ЗУБЧАТАЯ МУФТА С ОТКЛЮЧЕНИЕМ ПРИВОДА | 2002 |
|
RU2230952C2 |
| СТЕНД ДЛЯ НАСТРОЙКИ АНТЕНН | 1970 |
|
SU424262A1 |
| Многопозиционный механизм управления рабочими органами сельскохозяйственной машины | 1990 |
|
SU1784571A1 |

Изобретение относится к оборудованию, предназначенному для автоматизациии механизации различных технологических , п роцессов, а именно к обработке различных ^ изделий. Целью изобретения является по* вышение точности позиционирования заА-Асчёт обеспечения постоянного натяжения трособлочной системы. Аатооператор состоит из основания с направляющими, на которых установлена каретка с исполни-' тельным органом, проводящаяся в движение от двигателя 9, основного барабана 21 с основным тросом, концы которого закреплены на барабане 21 и каретке, и дополнительного барабана 22с дополнительным Тросом, концы которого закреплены на барабане 22 и каретке. При этом оба барабана кинематически связаны между собой посредством двух параллельно расположенных ветвей зубчатых передач, первая из которых обеспечивает натяжение троса при гюдьёме каретки, а вторая - при ее спуске, ведущие зубчатые колеса зтих ветвей вы--гёгв-IR•'Г^^^ ^^-г^^г.2О Сл>&ы00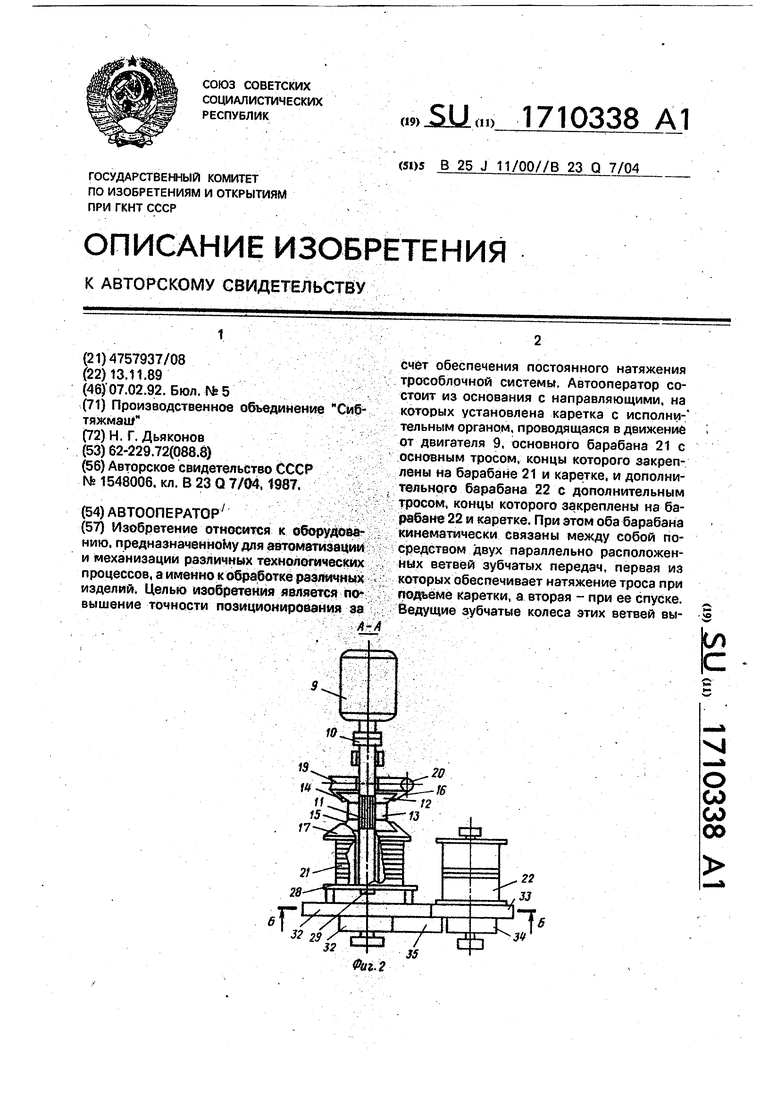
Изобретение относится к оборудованик}, предназначенному автоматизировать и механизировать различные технологические процессы, а именно при обработке различных изделий.
Целью изобретения является повышение точности позиционирования за счет обеспечения постоянного натяжения тросов-трособлочной системы.
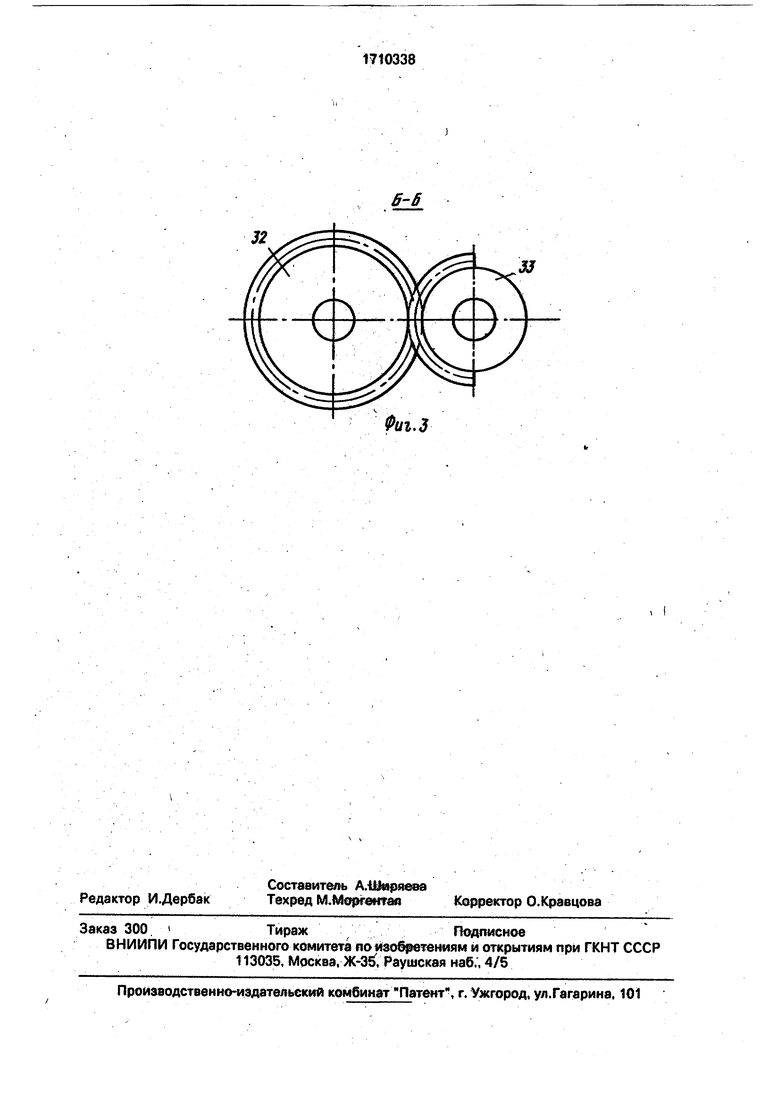
На фиг. 1 изображен автооператор, общий вид; на фиг. 2 - разрез А-А на фиг. 1: на фиг. 3 - разрез Б-Б на фиг. 2.
Автооператор содержит основание 1 в виде вертикальных стоек, на которых смонтированы направляющие 2, опирающиеся посредством нижних 3 и верхних 4 катков на фундамент 5, каретку 6 с исполнительным органом 7 «1 привод 8 перемещения исполнительного органа.
Привод 8 перемещения исполнительного органа 7 включает двигатель 9 и механизмы перемещений каретки 6 (вертикального и колебательного движений) и основания 1 автооператор. Причем выходной вал двигателя 9 (например, мотор-редуктор) посредством муфты 10 соединен со шлицевым валом 11, на котором смонтирована двусторонняя муфта 12 сцег1ления с механизмом перемещения каретки 6 с исполнительным органом 7 и- с механизмом перемещения основания автооператора. Двусторонняя муфта 12 сцепления содержит с возможностью осевого перемещения по щлицевой части вала 11 сцепную втулку 13с конусами 14 и 15 для взаимодействия с конусными дисками 16 и 17.
Механизм перемещения основания автооператора содержит цепную 18 и червячную передачи, причем червячное колесо 19 червячной передачи жестко связано с конусным диском 16, а червяк 20 посредством цепной передачи 18 связан с верхним катком 4 основания 1.
Механизм перемещения каретки состоит из кривошипно-шатунного механизма и трособлочной системы.
Трособлочная система состоит из основного 21 и дополнительного 22 барабанов, основного 23 и дополнительного 24
тросов, блока 25 и системы блоков 26, причем основной барабан 21 жестко связан с конусным диском 17 и кинематически с дополнительным барабаном 22. Основной
трос 23 огибает блок 25 и концами запрессован на основном барабане 21 и каретке 6, оснащенной катками 27 для перемещения по направляющим 2, а дополнительный трос 24 огибает систему блоков 26 и запрессован
концами соответственно на дополнительном барабане 22 и каретке 6 с противоположной стороны от закрепления основного троса 23.
Кривошипно-шатунный механизм содержит установленный соосно с основным барабаном 21 диск 28, на котором закреплен шатун 29, при зтом расстояние от места его соединения с диском 28 до оси основное го барабана 21 определяет радиус кривошипа. Другой конец шатуна 29 шарнирно соединен с коромыслом 30, закрепленным шарнирно на основании 1, противоположный конец которого несет на себе ось 31 с блоком 25.
Кинематическая связь основного барабана 21 с дополнительным барабаном 22 выполнена в виде двух параллельно расположенных ветвей зубчатых передач, ведущие зубчатые колеса которых представляют
двухеенцовый блок 32, установленный соосно с основным барабаном 21, а ведомые зубчатые колеса 33 и 34 выполнены с вырезанными зубьями, а также установлены и закреплены соосно с дополнительным барабаном 22. Участки Q вырезанными зубьями в этих зубчатых колесах 33 и 34 смещены в противогЮлояшые стороны и их взаимодействие с венцами двухвенцового блока 32 осуществляется поочередно при вращении
последнего от основного барабана 21. Причем, второй венец двухвенцового блока 32 взаимодействует с ведомым зубчатым колесом 34 посредством промежуточного зубчатого колеса 35.
Автооператор работает следующим образом.
Автооператор подводится посредством механизма перемещения его основания 1 к
обрабатываемому объекту и может перемещаться вдоль него, если объект установлен стационарно (например, плоский объект).
Если обрабатываемый объект имеет форму круглую или многогранную, то он может быть установлен с возможностью вращения, а автооператор может не перемещаться. В зависимости от технологических потребностей кареткз 6 устанавливается на необходимой высоте относительно обрабатываемого объекта включением двигателя 9 на вращение основного барабана 21. Далее устанавливается исполнительный орган 7 и снова включается двигатель 9 на вращение основного барабана 21.
При сматывании основного трбса 23 с основного барабана 21 за счет того, что блок 25 совершает качательные движения, каретка б с исполнительным органом 7 совершает качательные движения при одновременном опускании каретки 6 с исполнительным органом 7. При движении основного троса 23 вверх каретка 6 с исполнительным органом 7 совершает таки.е же колебательные движения. Одновременно с этими движениями при вращении основного барабана 21 пер.вый венец двухвенцового блока 32 взаимодействует с ведомым зубчатым колесомЗЗ, а зубья промежуточного зубчатого колеей 35 проходят свободно вдоль пространства сектора вырезанных зубьев ведомого зубчатого колеса 34. При взаимодействии первого венца двухвенцового блока 32 с зубчатым колесом 33 происходит поворот дополнительного барабана 22, который наматывает на себя часть дополнительного троса 24.. освободившегося при опускании и качении каретки 6.
Величина наматываемого дополнительного троса 24 и перемещаемого вниз основного троса 23 строго одинакова, при этом величина опускания основного троса 23 определяется параметрами основного бараба-на 21 и кривошипно-шатунного механизма, а равная ей величина наматываемого на дополнительный барабан 22 дополнительного троса 24 легко определяется диаметром дополнительного барабана 22 и передаточным отношением взаимодействующих между собой первого венца двухзвенного блока 32 и зубчатого колеса 33, или отношением их числа зубьев. В тот момент, когда зубья первого венца двухвенцового блока 32 выходят из зацепления с зубьями зубчатого колеса 33 и начинают обкатываться по свободному пространству сектора вырезанных зубьев этого зубчатого колеса 33, зубья промежуточного зубчатого колеса 35 входят в зацепление с зубьями ведомого зубчатого колеса 34, поворачивая дополнительный барабан 22 в другую сторону, отпуская дополнительный трос 24, который выбирается кареткой 6, движущейся вверх. Здесь величина хода каретки отличается от величины хода ее вниз и поэтому эта величина согласована и определена по параметрам диаметра дополнительного барабана 22 и взаимным передаточным отнощением второго венца двухвенцового блока 32, промежуточного зубчатого колеса 35 и ведомого зубчатого колеса 34.
При обратном ходе каретки 6, подъем ее вверх основным тросом 23 взаимодействие всех зубчатых передач происходит в обратной последовательности. При взаимодействии первоговенца двухвенцового блока 32 и зубчатого колеса 33 происходит сматывание троса 24 с дополнительного барабана 22 (барабан 21 вращается в другую сторону соответственно вращается в другую сторону и дополнительный барабан 22) на такую же величину, что он сматывается при движении каретки 6 вниз, при этом величина наматывания основного троса 23 остается т же самая. При взаимодействии второго венца двухвенцового блока 32 через промежуточное зубчатое колесо 35 с зубчатым колесом 34 происходит наматывание троса 24 на дополнительный барабан 22 на величину, равную той. на которую он сматывался при движении каретки 6 вниз.
Таким образом, механизм перемещения каретки 6 с исполнительным органом 7 позволяет обеспечить строго определенные параметры шатунно-кривошипного механизма движения каретки 6 с исполнительным органом 7 как в крайних, так и в промежуточных положениях их за один цикл качания вверх-вниз при опускании или подъеме основного троса 23. Кроме того, этот механизм исключает соскакивание основного троса 23 с блока 25. особенно при высокочастотных колебаниях, поскольку обеспечивается постоянная взаимная натяжка основного и дополнительного тросов. Взаимная натяжка основного и дополнительного тросов позволяет использовать автооператор при наклонном и даже горизонтальном положении его (при необходимости можно установить дополнительный отклоняющий блок перед качающим блоком за кареткой), что расширяет технологические возможности применения его в различных технологических процессах.
Формула изобретения
Автооператор, содержащий основание с направляющими, на которых установлена каретка с исполнительным органом, и привод перемещения исполнительного органа, включающий двигатель и механизмы перемещений основания и каретки, причем механизм перемещения каретки имееттрособлочную систему, состоящую из основного барабана, кинематически связанного с двигателем, основного троса, один конец которого закреплен на основном барабане, а другой - на одном из концов каретки, и дополнительного троса, отличаю щи йс я тем, что, с целью повышения точности позиционирования за счет обеспечения постоянного натяжения тросов трособлочной системы, трособлочная система механизма перемещения каретки снабжена дополнительным барабаном, кинематически связанным с основным барабаном, а дополнительный трос одним концом закреплен на
31 25
13
этом дополнительном барабане, а другим на другом конце каретки, при зтом кинема, тическая связь основного и дополнительного барабанов выполнена в виде двух параллельно расположенных ветвей зубчатых передач, ведущие зубчатые колеса которых представляют единый двухвенцовый блок, установленный соосно с основным барабаном, а ведомые зубчатые колеса этих передач имеют участки с вырезанными зубьями и установлены соосно дополнительному барабану, причем один из зубчатых венцов двухвенцового блока связан с соответствующим ведомым зубчатым колесом посредством дополнительно введенного промежуточного колеса.
J2
33
| Автооператор | 1987 |
|
SU1548006A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
