Изобретение относится к оборудованию, предназначенному автоматизировать и механизировать различные технологические процессы, а именно для обработки различных изделий и для нанесения покрытий на изделия.
Целью изобретения является расширение технологических возможностей за счет обеспечения дополнительных перемещений исполнительного органа и повышение производительности за счет совмещения по времени различных перемещений.
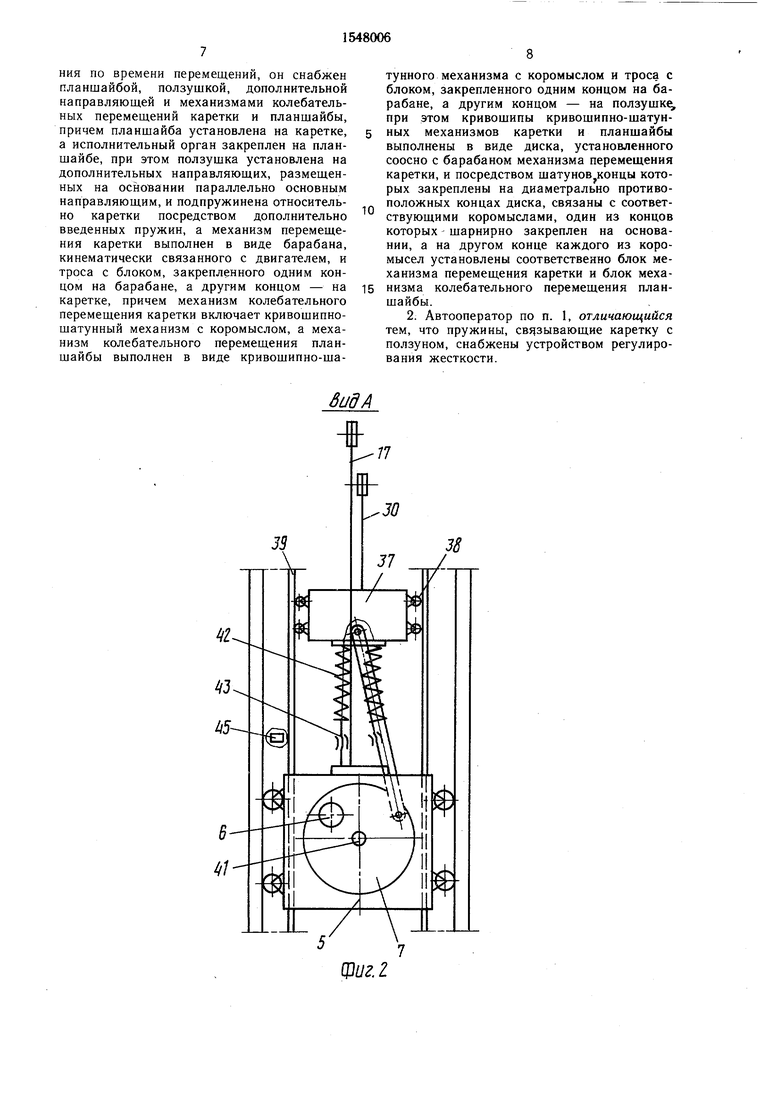
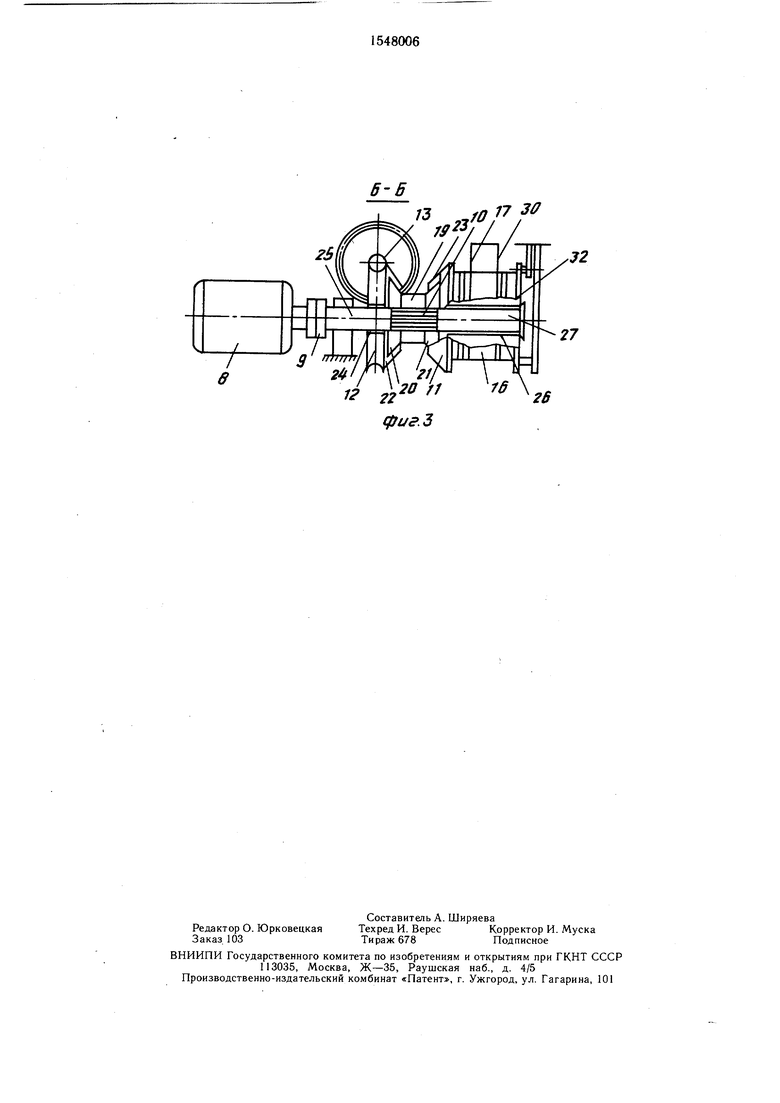
На фиг. 1 изображен автооператор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Автооператор содержит основание 1 в виде вертикальных стоек с основными направляющими 2 и с нижними 3 и верхними 4 катками и каретки 5, установленной на основных направляющих 2, исполнительный орган 6, установленный на каретке 5 посредством планшайбы 7, и привод перемещения исполнительного органа. Последний содержит двигатель 8, механизмы перемещения основания 1 и каретки 5 и механизмы колебательных перемещений каретки и планшайбы 7. Выходной вал двигателя 8 посредством муфты 9 соединен со шлицевым валом 10, на котором установлена двухсторонняя муфта 11 сцепления с механизмами перемещения основания I и каретки 5. Механизм перемещения основания состоит из червячной и цепной передач, причем червячное колесо 12 кинематически связано с двигателями, червяк 13 - с ведущей звездочкой 14 цепной передачи, а ведомая звездочка 15 - с верхним катком 4 основания 1.
Механизм перемещения каретки 5 состоит из барабана 16 и троса 17 с блоком 18, который одним концом закреплен на барабане 16, кинематически связанном с двигателем 8, а другим концом - на каретке 5. Двусторонняя муфта 11 сцепления содержит
установленную с возможностью осевого перемещения по шлицевому валу 10 сцепную втулку 19 с конусами 20 и 21 для взаимодействия с конусными дисками 22 и 23. Конусный диск 22 прикреплен к червячному колесу 12 и установлен на опоре 24, имеющей возможность свободного вращения относительно хвостовика 25, шлицевого вала 10, а конусный диск 23 - к барабану 16 и установлен на опоре 26, имеющей возможность
о также свободного вращения относительно хвостовика 27 шлицевого вала 10.
Механизм колебательного перемещения каретки состоит из кривошипно-шатунного механизма и коромысла 28. Механизм колебательного перемещения планшайбы состоит
5 из кривошипно-шатунного механизма с коромыслом 29 и троса 30 с блоком 31, причем кривошипы механизмов колебательных перемещений каретки 5 и планшайбы 7 выполнены в виде диска 32, установленного соосно с барабаном 16, и на его диаметрально противоположных концах закреплены шатуны 33 и 34 этих механизмов, связанных с соответствующими коромыслами 28 и 29, которые закреплены одним концом на основании I посредством общего шарнира. На дру5 том конце каждого из коромысел 28 и 29 закреплены посредством осей 35 и 36 блоки 18 и 31, огибаемые соответственно тросами 17 и 30, последний из которых одним концом жестко прикреплен к ползушке 37, а другой конец запасован так же, как и трос 17, на
0 барабане 16. Ползушка 37 снабжена катками 38, фиксирующими положение ее при перемещении по дополнительным направляющим 39. На ползушке 37 шарнирно установлен одним концом шатун 40, другой конец которого шарнирно закреплен на плаи5 шайбе 7 эксцентрично относительно оси 41 вращения, образуя плечо момента вращения планшайбы 7. Между кареткой 5 и ползушкой 37 установлены и прикреплены к ним
0
пружины 42 растяжения-сжатия с механизмами 43 регулирования их жесткости. На основании 1, внизу и вверху, смонтированы путевые датчики 44 и 45, определяющие крайние положения каретки 5 при ее перемещениях по основным направляющим 2.
Автооператор работает следующим образом.
При нахождении каретки 5 в промежуточном по высоте положении сцепная втулка 19 (может быть оборудована электромагнитным устройством) автоматически переводится влево до сопряжения конуса 21 с конусным диском 23 для передачи вращающегося момента барабану 16. Последний, вращаясь, передает движения тросу 17, который осуществляет подъем или опускание каретки 5 с установленным на ней исполнительным органом 6. При этом при вращении диска 32 шатун 33 передает колебательные движения коромыслу 28 с блоком 18. Каретка 5 вместе с планшайбой 7 и исполнительным органом 6 через трос 17 получает дополнительные колебательные движения. По другой кинематической цепи происходит следующее.
При вращении диска 32 блок 31 через шатун 34 и коромысло 29 получает колебательное движение. Ползушка 37, связанная с тросом 30, совершает колебательное движение вдоль дополнительных направляющих 39 со смещенным по фазе направлением относительно такого же движения каретки 5 при одновременном синхронном с кареткой 5 перемещении (опускании или подъеме) за счет того, что тросы 17 и 30 запасованы на одном и том же барабане 16. Циклически изменяющееся расстояние между ползушкой 37 н кареткой 5 заставляет шатун 40 совершать сложное движение, результатом чего является поворот планшайбы 7 относительно оси 41, при этом другой замыкающий элемент между ползушкой 37 и кареткой 5 - пружина 42 растяжения-сжатия, периодически или растягивается при противоположных движениях каретки 5 и ползушки 37, или сжимается при встречных движениях их, а величина предварительно установленного усилия в пружинах 42, устанавливаемая механизмом 43 регулирования жесткости, определяет величину растягивающего усилия пружин 42 и равного ему сжимающего усилия при встречном движении каретки и ползушки. Это усилие должно быть не менее величины сопротивления поворота планшайбы 7, которое может быть различным для разных технологических процессов, в противном случае ползушка 37 не опускается (при встречном их движении), что является причиной нежелательного ослабления троса 30 в эти моменты. Чрезмерное установленное усилие в пружинах 42 является причиной дополнительной непроизводительно затрачиваемой мощности привода. Кроме того, предварительная
установка жесткости пружин 42 изменяет их линейную длину и, соответственно, предварительное расстояние между кареткой 5 и ползушкой 37, определяющими исходное положение шатуна 40 относительно, например, горизонтальной оси планшайбы 7, что при одном и том же радиусе кривошипа вращающегося диска 32 и при заданном исходном положении исполнительного органа 6 относип тельно указанной горизонтальной оси планшайбы 7 определяет различный характер его движения. Установка пружин 42 позволяет также компенсировать возможные несинхронности движения каретки и ползушки 37 как в колебательном их движении, так и в
5 поступательном.
При достижении кареткой 5 крайних положений по основным направляющим 2, вверху или внизу, сигналы от путевых датчиков 44 и 45 поступают на устройство пере0 движения конусной втулки 19, которая перемещается вправо и сопрягается с конусным диском 22 посредством конуса 20. В цепь управления двигателя 8 поступает сигнал на вращение его якоря через реле времени на заданный промежуток времени. Кру5 тящий момент с двигателя 8 передается через кинематическую цепь червячная передача - цепная передача на приводной верхний каток 4. Происходит перемещение всего автооператора на заданное определенное расстояние. После остановки двигателя 8 ко0 нусная втулка 19 также автоматически перемещается влево до сопряжения посредством конуса 21 с конусным диском 23, передающим вращение барабану 16 и диску 32, в цепь управления двигателя 8 поступает сигнал на включение его для вращения
5 якоря в необходимую сторону. Это является началом нового цикла перемещения каретки 5 со сложным движением исполнительного органа 6, установленного на планшайбе 7. Эти циклы повторяются вдоль всего
0 обрабатываемого объекта, относительно которого перемещается автооператор.
Таким образом, от одного привода осуществляются четыре вида движений: подъем или опускание каретки, колебание ее вдоль основной направляющей, колебание план5 шайбы с исполнительным органом и перемещение автооператора, причем первые три из них осуществляются одновременно.
Формула изобретения
1. Автооператор, содержащий основание
с основными направляющими, каретку, установленную на основных направляющих, и исполнительный орган с приводом его перемещения, включающий двигатель и меха5 низмы перемещений основания и каретки, отличающийся тем, что, с целью расширения технологических возможностей и повышения производительности за счет совмещения по времени перемещений, он снабжен планшайбой, ползушкой, дополнительной направляющей и механизмами колебательных перемещений каретки и планшайбы, причем планшайба установлена на каретке, а исполнительный орган закреплен на планшайбе, при этом ползушка установлена на дополнительных направляющих, размещенных на основании параллельно основным направляющим, и подпружинена относительно каретки посредством дополнительно введенных пружин, а механизм перемещения каретки выполнен в виде барабана, кинематически связанного с двигателем, и троса с блоком, закрепленного одним концом на барабане, а другим концом - на каретке, причем механизм колебательного перемещения каретки включает кривошипно- шатунный механизм с коромыслом, а механизм колебательного перемещения планшайбы выполнен в виде кривошипно-шатунного механизма с коромыслом и троса с блоком, закрепленного одним концом на барабане, а другим концом - на ползушке, при этом кривошипы кривошипно-шатун- ных механизмов каретки и планшайбы выполнены в виде диска, установленного соосно с барабаном механизма перемещения каретки, и посредством шатунов концы которых закреплены на диаметрально противоположных концах диска, связаны с соответствующими коромыслами, один из концов которых шарнирно закреплен на основании, а на другом конце каждого из коромысел установлены соответственно блок механизма перемещения каретки и блок меха- низма колебательного перемещения планшайбы.
2. Автооператор по п. 1, отличающийся тем, что пружины, связывающие каретку с ползуном, снабжены устройством регулирования жесткости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1991 |
|
SU1805030A1 |
| Автооператор | 1991 |
|
SU1805031A1 |
| Автооператор | 1989 |
|
SU1710338A1 |
| Установка для полирования плоских поверхностей | 1991 |
|
SU1779550A1 |
| Автооператор | 1989 |
|
SU1634436A2 |
| Установка для окраски крупногабаритных изделий | 1990 |
|
SU1720739A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Устройство для подачи длинномерного материала в рабочую зону пресса | 1987 |
|
SU1503948A1 |
| Устройство для разбраковки п-образных ферритовых сердечников | 1972 |
|
SU449374A1 |
| Устройство для наматывания и разматывания рулонов | 1984 |
|
SU1196063A1 |
Изобретение относится к оборудованию, предназначенному автоматизировать и механизировать различные технологические процессы, а именно для нанесения покрытий на изделия и обработки различных изделий. Целью изобретения является расширение технологических возможностей и повышение производительности за счет совмещения по времени различных перемещений. Это достигается за счет осуществления от одного двигателя возвратно-поступательного и колебательного перемещений каретки, колебательного перемещения планшайбы и перемещения всего автооператора, причем первые три движения осуществляются одновременно. Одновременность перемещений обеспечивается за счет вращения барабана, который вращаясь, передает движение тросу, жестко связанному с кареткой 5, и вращения диска 32, который через шатун 33 передает качательное движение коромыслу 28 и блоку 18, обеспечивая дополнительное колебательное перемещение каретки 5 вместе с планшайбой и исполнительным органом. За счет вращения блока 18, кинематически связанного посредством кривошипно-шатунных механизмов и коромысел 28 и 29 с блоком 31, имеющим противоположное направление качания, и перемещения троса, связывающего ползушку 37 с барабаном, обеспечивается колебательное перемещение ползушки. Циклически изменяющееся расстояние между ползушкой 37 и кареткой 5, связанными между собой пружиной 42 и шатуном 40, обеспечивается колебательное перемещение планшайбы с исполнительным органом. Регулировка жесткости пружины обеспечивается устройством регулирования жесткости. 1 з.п. ф-лы, 3 ил.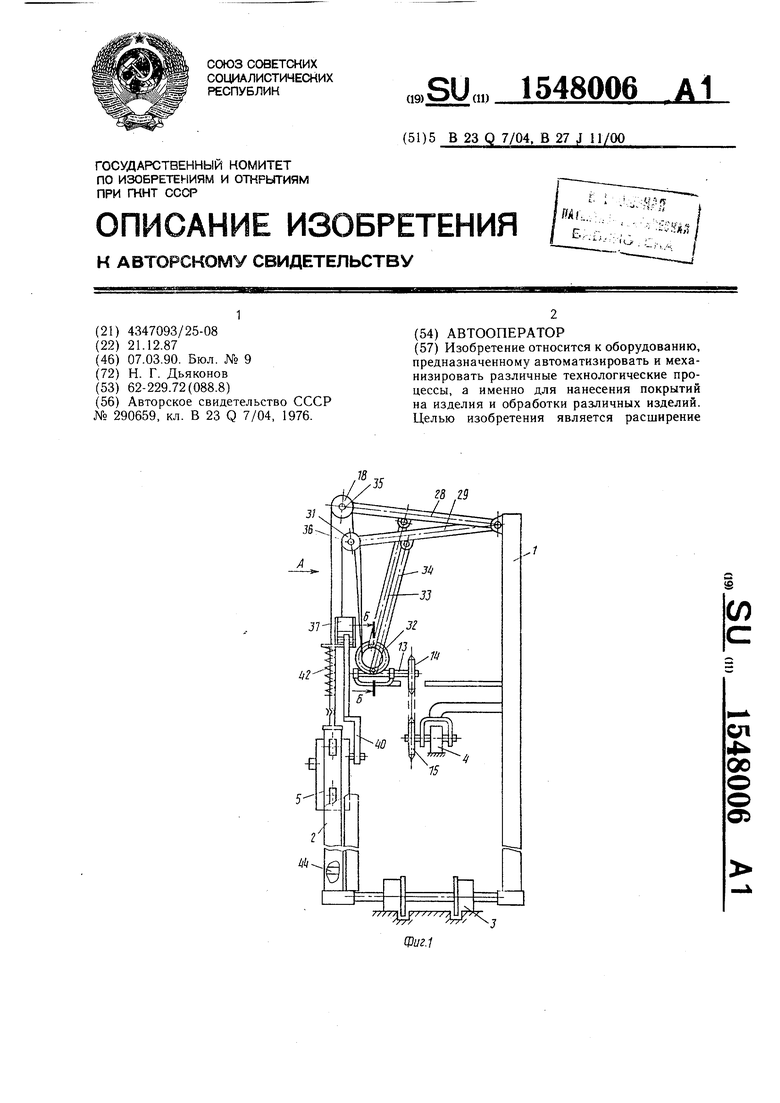
Лид А
К
фиг. г
6
б В
27
26
| Загрузочное устройство | 1970 |
|
SU290659A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
