ел
С
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ОБЪЕКТА ЗАЩИТЫ | 2011 |
|
RU2522194C2 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1987 |
|
RU2031039C1 |
| ШАРНИРНЫЙ УЗЕЛ ШТАНГОВОЙ ПРОДОЛЬНОЙ СВЯЗИ ТЕЛЕЖКИ С КУЗОВОМ ЛОКОМОТИВА | 2007 |
|
RU2364537C1 |
| Амортизатор с переменной жесткостью | 1987 |
|
SU1483132A1 |
| ПРУЖИННЫЙ АМОРТИЗАТОР | 1992 |
|
RU2062920C1 |
| МЕХАНИЗМ ВКЛЮЧЕНИЯ-ВЫКЛЮЧЕНИЯ И ПЕРЕКЛЮЧЕНИЯ | 2013 |
|
RU2519956C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2190552C2 |
| МЕХАНИЗМ ШАРНИРА-ФИКСАТОРА | 2013 |
|
RU2511490C1 |
| Установка для снятия остаточных напряжений в литых и сварных деталях | 1980 |
|
SU903700A1 |
| ИЗМЕРИТЕЛЬНАЯ ВСТАВКА | 2011 |
|
RU2458326C1 |

Использование:машиностроение, сейс- мозащитные устройства. Сущность изобретения: амортизатор содержит шарнирный ромб-четырехзвеннйк. Скоба шарнирно закреплена снаружи по малой диагонали ромба на одном из шарниров. Наружная пружина установлена в скобе, один конец пружины закреплен на шарнире ромба, противоположным шарниру, на котором установлена скоба, а другой конец пружины поджат винтом в скобе. Другая пружина размещена и закреплена внутри ромба по его большой диагонали. Жесткость внутренней пружины равна или больше удвоенной жесткости внутренней пружины. 2 ил.
Изобретение относится к пружинным устройствам и может быть использовано как основная часть амортизатора или сейсмоза- щитногО устройства,
Цель изобретения - изменение жесткости в процессе работы.
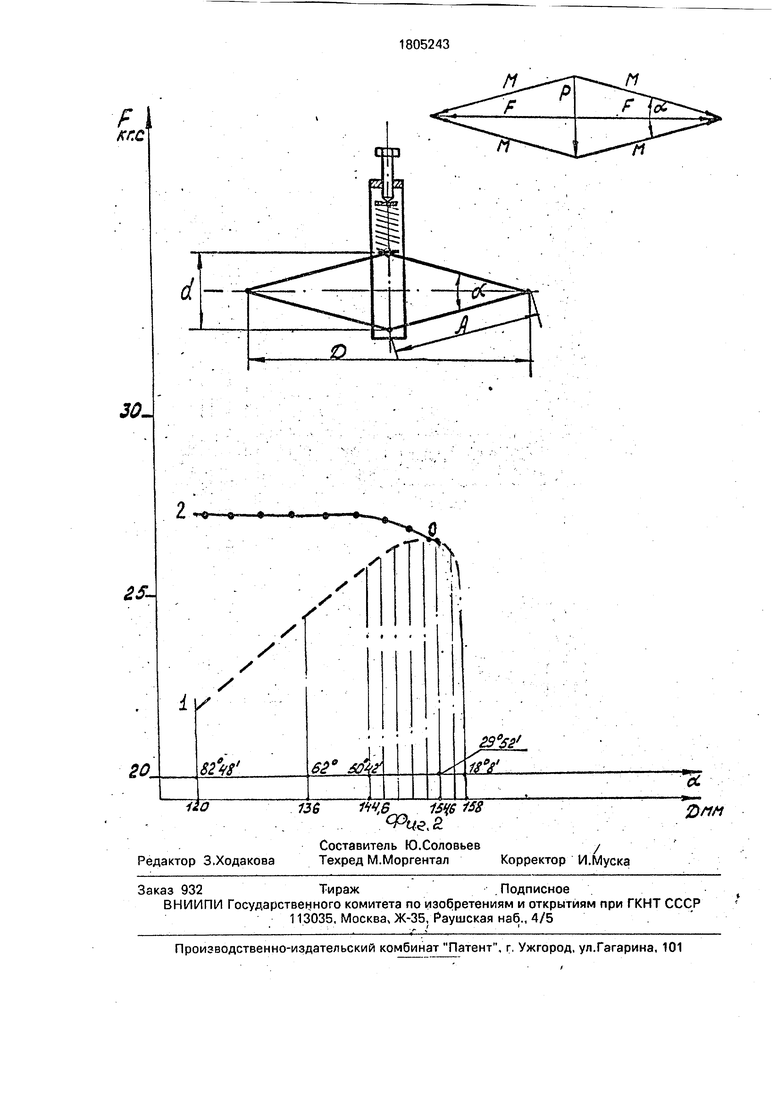
На фйг,1 показан упругий элемент, разрез.
Рычаги 1 с помощью осей 2-5, шарнирно соединены между собой в форме ромба четырехзвенника. На этих же осях по большой диагонали ромба закреплены упорные скобы б и 7, На продолжении малой диагонали ромба установлена наружная пружина сжатия 8, которую поджимают винтом 9, ввернутом в скобу 10. Последняя насажена на левую ось 5, а пружина 8 упирается в правую ось 4, на которой предусмотрен хвостовик 11с винтовой канавкой hofl пружину 8, Наворачивая пружину 8 на хвостовик 11, регулируют ее жесткость. В выбранном положении пружину 8 фиксируют винтом 12. . По большой диагонали ромба между осями 2 и-3 установлена внутренняя пружина сжатия 13,
Для регулирования жесткости пружину 13 наворачивают на хвостовик 14, являющийся частью оси 2. В хвостовике 14 просверлено отверстие, в которое входит направляющая 15, образуя телескопическое соединение. Для выхода воздуха предусмотрено.отверстие 16. Пружину 13 поджимают гайками 17 навернутыми на резьбу 18. Начальный угол между рычагами 1 в зэвиси-. мости от диаметра пружины 13 и диаметров осей 4, 5 составляет около 10 .
На фиг.2 показана характеристика упругого элемента, которую строят сложением приведенных характеристик двух пружин.
Из параллелограмма сил видно, что сиРла F tn r-r/i усилие пружины Р kd. В
со о
СП
кэ
СА
любом ромбе d а/2, отсюда Р 2КА sin а/2, а приведенная характеристика ромба-четырехзвенника F 2KA cos all или в координатах F - х; F -fox, т.е. прямая линия где K2f 2K.Если отрегулировать жес- 5 ткость внутренней пружины равной удвоенной жесткости наружной КВн 2 Кнар, сложением характеристик получим идеальную характеристику упругого элемента Fa Const, В реальной конструкции устанавли- Ю вают жесткость внутренней пружины несколько большей, чем удвоенная жесткость внутренней Кнар 2КВн, с тем чтобы получить характеристику упругого элемента с небольшой положительной жесткостью Рз Кзх. 15
Упругий элемент работает следующим образом;
Упругий элемент устанавливают в жесткую скобу, один из упоров которой укреплен на винте. Под упорные скобы 6 и 7 устанав- 20 ливают минидинамометры. Передвигая винтом упор скобы, снимают характеристику F f(x). При необходимости регулируют жесткость пружины 8, наворачивая ее на хвостовик 11 и поджимая ее винтом 9.25
Наворачивая пружину 13 на хвостовик 14, изменяют ее жесткость таким образом, чтобы характеристика соответствовала идеальной, т.е. F Const. При необходимости получения характеристики с небольшой же- 30 сткостью К2 увеличивают жесткость пружины 13. В амортизаторах и сейсмозащитных устройствах кроме упругого элемента должны быть предусмотрены упругие фиксаторы крайних положений, промежуточные опоры 35 или рычаги и т.п.
В амортизаторах и сейсмозащитных; устройствах уп ру гий элемент нагружа сом защищаемого оборудования так, чтобы размер Б телескопического соединения со- 40 ответствовал амплитуде колебаний опоры. Если вес превышал несущую способность
упругого элемента, то их соединяют по несколько штук в параллель. При вибрации опоры или сейсмоколебаниях и величине амплитуды А, не превышающей половины
хода упругого элемента А при идеапьной
характеристики F Сопзт защищаемое оборудование остается на месте. Так как жесткость амортизатора равна нулю, то и его собственная частота равна нулю
а)соь /57 -/СГ 0. В реальной конструк- М М
ции РЗ Кзх, собственная частота ftfc06 0 и
1
коэффициент изоляции Ки
( Wctf
о
((Оь - вынужденная частота вибрации).
Упругий элемент может быть использован также для создания постоянного усилия на металловедческие образцы, испытания которых проводятся при некоторых колебаниях температуры и при изменении высот ы образца за счет его ползучести. Формула изобретен и я Амортизатор, содержащий шарнирный ромб-четырехзвенник и пружины, одна из которых расположена с наружной поверхности ромба,, отличающийся тем, что, с целью улучшения амортизирующей способности, он снабжен установленной на малой диагонали ромба скобой с винтом, один конец которой шарнирно закреплен на наружной поверхности на шарнире ромба, наружная пружина установлена в скобе, один конец наружной пружины закреплен на противоположном от закрепленного конца скобы шарнира ромба, а другой поджат витом в скобе, другая пружина размещена внутри ромба и закреплена по большой диагонали, а жесткость ее равна или больше удвоенной, жесткости наружной,пружины.
. /
| Способ изготовления виброизолятора | 1986 |
|
SU1442739A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Амортизатор с переменной жесткостью | 1987 |
|
SU1483132A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
