S1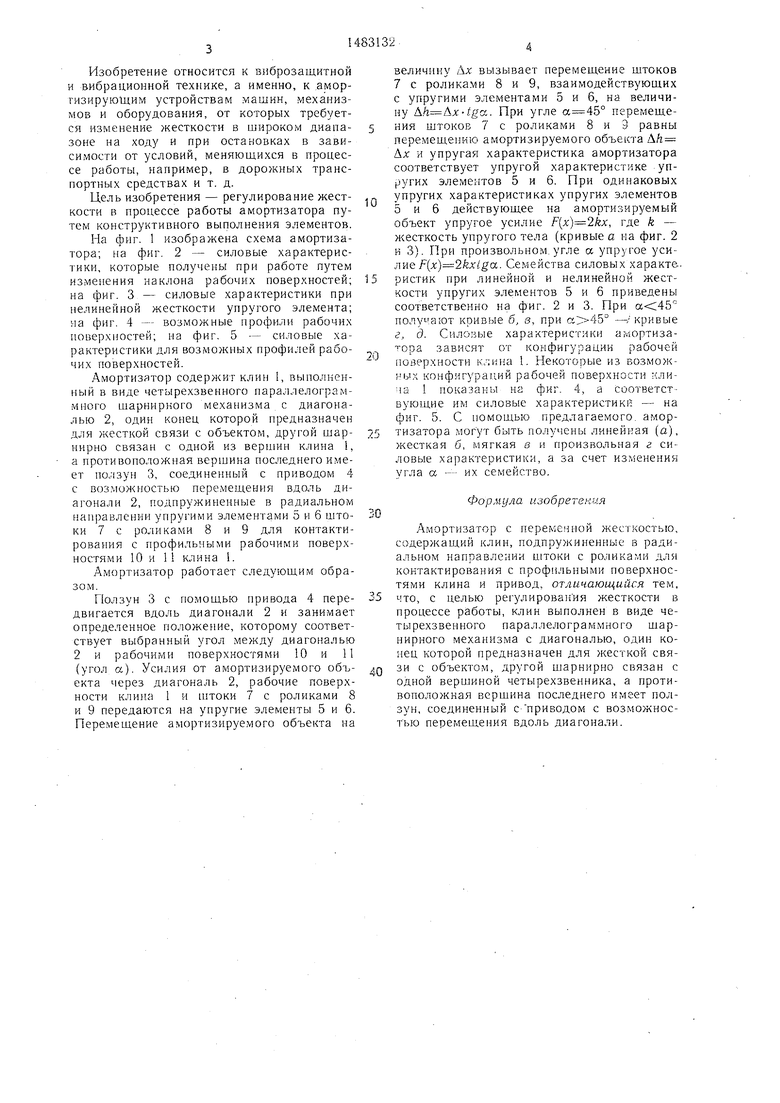
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424126C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2422295C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2422294C2 |
| Амортизационное устройство | 1972 |
|
SU446686A1 |
| РЕССОРНОЕ ПОДВЕШИВАНИЕ РАМЫ ТЕЛЕЖКИ СПЕЦИАЛИЗИРОВАННОГО ГРУЗОВОГО ВАГОНА | 2002 |
|
RU2224665C2 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424455C2 |
| РЕССОРНОЕ ПОДВЕШИВАНИЕ РАМЫ ТЕЛЕЖКИ ЖЕЛЕЗНОДОРОЖНОГО ЭКИПАЖА | 2002 |
|
RU2224664C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424128C2 |
| ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2009 |
|
RU2424125C2 |

Изобретение относится к виброзащитной и вибрационной технике, а именно к амортизирующим устройствам машин, механизмов и оборудования, от которых требуется изменение жесткости в широком диапазоне на ходу и при остановке. Целью изобретения является регулирование жесткости в процессе работы амортизатора за счет конструктивного выполнения элементов. Выполнение клина 1 в виде четырехзвенного параллелограмного шарнирного механизма с диагональю, один конец которой предназначен для жесткой связи объектом, а другой шарнирно связан с одной из вершин клина, а противоположная вершина имеет ползун 3, связанный с приводом 4, а его рабочих поверхностей 10,11 профильными позволили изменять при работе угол Α, т.е. регулировать жесткость амортизатора в процессе работы. 5 ил.
Фиг.1
(Л
3
оь
СО СО
к
Изобретение относится к виброзащитной и вибрационной технике, а именно, к амор- гизируюгцим устройствам машин, механизмов и оборудования, от которых требуется изменение жесткости в широком диапазоне на ходу и при остановках в зависимости от условий, меняющихся в процессе работы, например, в дорожных транспортных средствах и т. д.
Цель изобретения - регулирование жесткости в процессе работы амортизатора путем конструктивного выполнения элементов.
На фиг. 1 изображена схема амортизатора; на фиг. 2 - силовые характеристики, которые получены при работе путем изменения наклона рабочих поверхностей; на фиг. 3 - силовые характеристики при нелинейной жесткости упругого элемента; на фиг. 4 -- возможные профили рабочих поверхностей; па фиг. 5 - силовые характеристики для возможных профилей рабочих поверхностей.
Амортизатор содержит клин 1, выполненный в виде четырехзвенного параллелограм- миого шарнирного механизма с диагональю 2, один конец которой предназначен для жесткой связи с объектом, другой шар- нирно связан с одной из вершин клина 1, а противоположная вершина последнего имеет ползун 3, соединенный с приводом 4 с возможностью перемещения вдоль диагонали 2, подпружиненные в радиальном направлении упругими элементами 5 и 6 штоки 7 с роликами 8 и 8 для контактирования с профильными рабочими поверхностями 10 и 1 клина 1.
Амортизатор работает следующим образом.
Ползун 3 с помощью привода 4 передвигается вдоль диагонали 2 и занимает определенное положение, которому соответствует выбранный угол между диагональю 2 и рабочими поверхностями 10 и 11 (угол а). Усилия от амортизируемого объекта через диагональ 2, рабочие поверхности клипа 1 и штоки 7 с роликами 8 и 9 передаются на упругие элементы 5 и 6. Перемещение амортизируемого объекта на
0
величину Ах вызывает перемещение штоков 7 с роликами 8 и 9, взаимодействующих с упругими элементами 5 и 6, на величину &h &x-tga. При угле перемещения штоков 7 с роликами 8 и Э равны перемещению амортизируемого объекта Дй Дх и упругая характеристика амортизатора соответствует упругой характеристике упругих элементов 5 и 6. При одинаковых упругих характеристиках упругих элементов 5 и 6 действующее на амортизируемый объект упругое усилие F(x)2kx, где k - жесткость упругого тела (кривые а па фиг. 2 к 3). При произвольном угле а упругое усилие F(x)2kxiga. Семейства силовых характе. ристик при линейной и нелинейной жесткости упругих элементов 5 и 6 приведены соответственно на фиг. 2 и 3. При получают кривые б, в, при -/кривые г, д. Силозые характеристики амортиза- тсра зависят от конфигурации рабочей поверхности ь,-;ина 1. Некоторые из возможных конфигураций рабочей поверхности :сли- ю 1 показаны на фиг. 4, а соответст ьующие им силовые характеристики - на фиг. 5. С помощью предлагаемого амортизатора могут быть получены линейная (а), жесткая б, мягкая в и произвольная г силовые характеристики, а за счет изменения угла а - их семейство.
Формула изобретения
Амортизатор с перемсчпой жее костью, содержащий клин, подпружиненные в радиальном направлении штоки с роликами для контактирования с профильными поверхностями клина и привод, отличающийся тем, что, с целью регулирования жесткости в процессе работы, клин выполнен в виде четырехзвенного параллелограммного шарнирного механизма с диагональю, один конец которой предназначен для жесткой связи с объектом, другой шарнирно связан с одной вершиной четырехзвенника, а противоположная вершина последнего имеет ползун, соединенный с приводом с возможностью перемещения вдоль диагонали.
Фаг. I
л f / г F(x)
iл. i
Фаг.Ч
а
Фаг. 5
а
Фиг. 5
| Кожевников С | |||
| Н | |||
| и др | |||
| Механизмы | |||
| М.: Машиностроение, 1976, с | |||
| ПРИСПОСОБЛЕНИЕ ПРОТИВ УГОНА РЕЛЬСОВ | 1923 |
|
SU708A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
