Изобретение относится к кривошипно- тюлзунным преобразователям движения и найдет применение в устройствах с непрямолинейной траекторией перемещения выходного звена.
Целью изобретения является расширение кинематических возможностей механизма за счет наложения на прямолинейное возвратно-поступательное перемещение ползуна в плоскости вращения кривошипа (или в плоскости, параллельной ей) дополнительного поперечного перемещения.
На фиг.1 показана структурная схема предложенного механизма; на фиг.2-то же, при выполнении ползуна из двух цилиндрических частей; на фиг.З - то же, из трех связанных шаровых частей.
Кривошипно-шатунный механизм содержит стойку с шарнирно закрепленным на ней входным кривошипом, шарниром 3 связанным с шатуном 4. С концом последнего жестко связана поперечная втулка 5, в круглом отверстии которой с возможностью поворота и осевого перемещения размещен первый выступ 6 ползуна. Второй выступ 7 ползуна 8 введен в профилированный паз 9 стойки. Ползун 8 установлен в направляющей 10, 11 стойки. Со вторым выступом 7 кроме того соединен рабочий орган 12. На фиг.2 показан вариант, в котором ползун выполнен в виде скрепленных друг с другом двух поперечных цилиндрических элементов, а на фиг.З - трех не лежащих на одной прямой шаровых элементов.
Механизм работает следующим образом.
При вращении относительно стойки 1 входного кривошипа 2 втулка 5 шатуна 4 . воздействует на первый выступ 6 ползуна 8 и, поворачиваясь относительно этого высту0
5
0
5
0
5
0
па, смещает последний по направляющей 10, 11 в продольном направлении. При этом второй выступ 7 ползуна с рабочим органом 12, взаимодействуя с профилированным пазом 9 стойки, обуславливает дополнительное поперечное смещение ползуна соответственно профилю паза. 8 итоге ползун 8 совершает возвратно- фигурное движение в направляющей 10,11 с траекторией движения, соответствующей очертанию (профилю) паза 9.
Механизм при выполнении по фиг.2 работает аналогично описанному с той лишь разницей, что цилиндрические элементы ползуна 8 обеспечивают лучшее соприкосновение последнего с направляющей и слежение за продольными ее неровностями, которые окажут влияние на перемещение рабочего органа. При выполнении механизма по фиг.З обеспечивается сяежёние и за поперечными неровностями направляющей, что еще больше расширяет кинематические возможности устройства.
Формула изобретения Кривошипно-шатунный механизм, включающий стойку с направляющей, шарнирно закрепленный на стойке кривошип, ползун, установленный в направляющей стойки, шатун, шарнирно соединенный с кривошипом, и втулку, жестко связанную с шатуном, отличающийся тем, что, с целью расширения кинематических возможностей; в стойке выполнен профилированный паз, на ползуне выполнены два выступа, один из которых размещен в отверстии втулки с возможностью поворота и осевого перемещения, а другой предназначен для взаимодействия с профилированным пазом стойки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1990 |
|
RU2017038C1 |
| Кривошипно-ползунный механизм | 1989 |
|
SU1656247A1 |
| Реверсивный кривошипно-ползунный механизм | 1986 |
|
SU1404712A1 |
| РЕВЕРСИВНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2011 |
|
RU2479768C1 |
| КОСТЫЛЕЗАБИВЩИК ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ | 2005 |
|
RU2284387C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2534107C2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ НЕПРЕРЫВНО ДВИЖУЩИХСЯ ТРУБ | 1992 |
|
RU2056981C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |

Изобретение относится к машиностроению и может найти применение в устройствах с непрямолинейной траекторией перемещения выходного звена. Цель изобретения - расширение кинематических возможностей механизма. Механизм содержит стойку 1 с шарнирно закрепленным на ней кривошипом 2, соединенным с шатуном 4, на котором жестко установлена втулка 5. Ползун 9 установлен в направляющей 10,11 стойки 1 и имеет два выступа 6, 7, один из которых взаимодействует с профилированным пазом 9, а другой - с втулкой 5. Расширение кинематических возможностей механизма достигается за счет тогр, что на прямолинейное возвратно-поступательное перемещение ползуна в плоскости, параллельной плоскости вращения кривошипа, накладывается перемещение в поперечном направлении, которое определяется формой профилированного паза. 3 ил.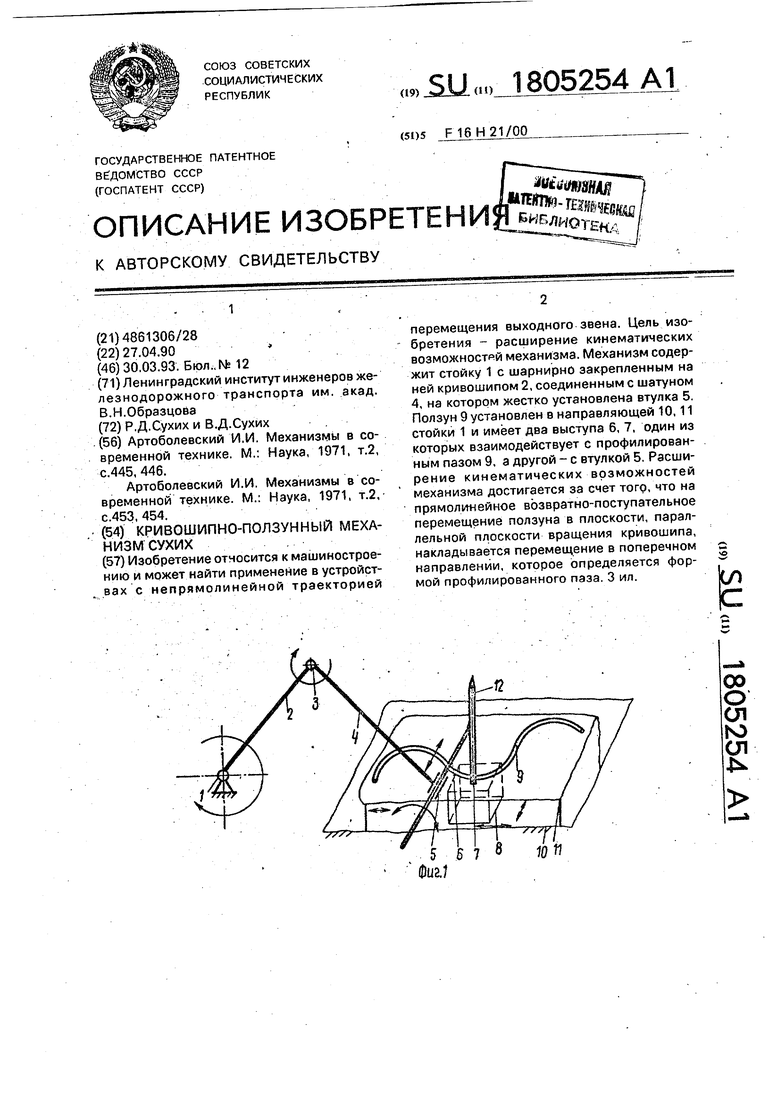
| Артоболевский И.И | |||
| Механизмы в современной технике, М.: Наука, 1971, т.2, с.445,446 | |||
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| М.: Наука, 1971, т.2, с.453, 454. |
