ю
VzSx
114047
Изобретение относится к машиностроению, а именно к кривошипно-пол- зунным преобразователям вращательного движения в возвратно-поступательное, в частности к устройствам со смещаемой амплитудой движения выходного звена.
Цель изобретения - расширение кинематических возможностей механизма
за счет смещения амплитуды на ходу и обеспечения реверса выходного звена.
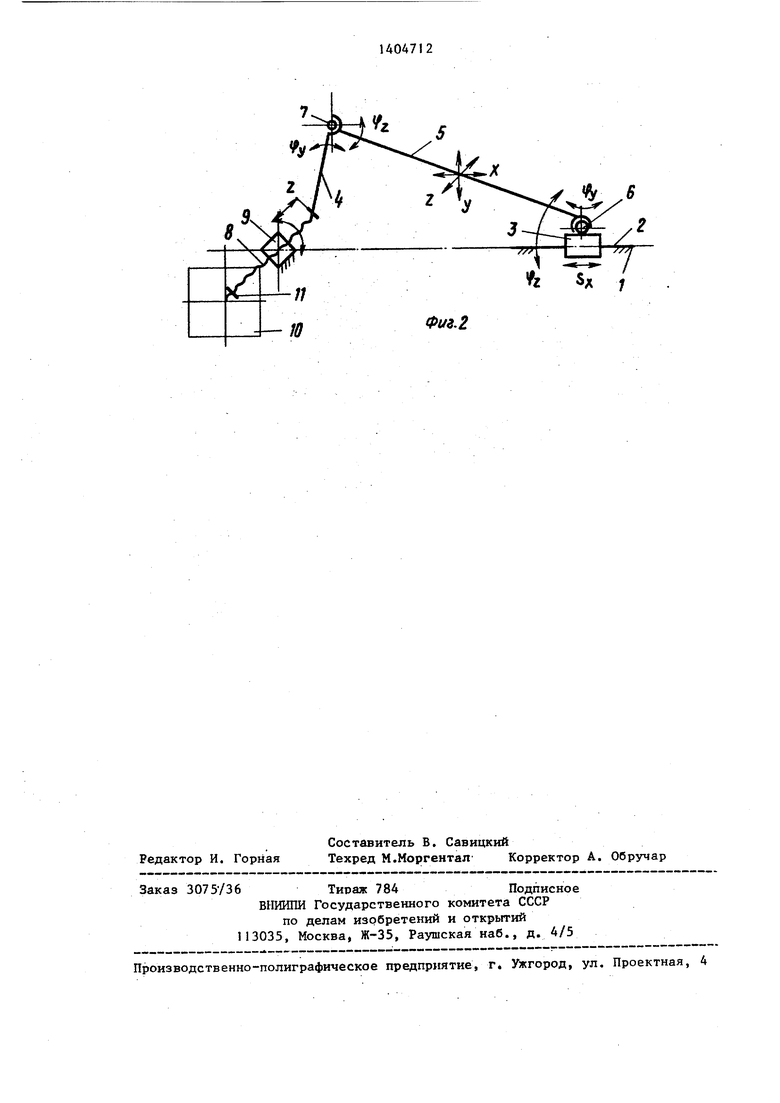
На фиг. 1 показана кинематическая схема предлагаемого механизма; на фиг. 2 - то же, с закрепленной на основании гайкой устройства регулировки хода ползуна.
Механизм содержит основание 1 с выполненной в нем прямолинейной на- правляющей 2, установленный в последней ползун 3, установленные на основании 1 кривошип 4 и шатун 5, связанный с ползуном 3 шарниром бис кривошипом 4 шарниром 7. Устройство смещения начальной точки хода ползуна 3 выполнено в виде винтовой пары, винт 8 которой жестко связан с кривошипом 4, Ось винта 8 - параллельна оси вращения .кривошипа 4, а на гайке 9 установлен шарнир 7, связьтающий кривошип 4 и шатун 5. На фиг. 2 показан вариант механизма, в котором гайка 9 жестко связана с основанием 1, а ось винта 8 совмещена с осью вращения кривошипа 4. Привод 10 слу- жит для сообщения кривошипу 4 вращательного движения, а установленный на винте 8 переключатель П - для изменения направления этого вращения, взаимодействует с гайкой 9 и функционально связан с приводом 10.
Механизм работает следующим образом.
Привод 10 сообщает кривошипу 4 вращательное движение. При этом винт 8, жестко связанный с кривошипом 4, совершает вращение относительно гайки 9, удерживаемой от проворота шатуном 5. В то же время гайка 9 совершает плоскопараллельное движение по окружности, описываемой винтом 8 вокруг оси кривошип 4.
Одновременно в результате относи- тельного вращения винта 8 и гайки 9 последняя вместе с шарниром 7 смеща-
0
0
c
0 5 5
0
5
122
ется вдоль винта 8. Шатун 5 располагается под углом к продольной оси направляющей 2, и расстояние между осью винта 8 и центром шарнира 6 становится меньше длины шатуна 5. В итоге ползун 3 совершает возвратно-пос- пательное движение в направляющей 2 с постоянной амплитудой и с изменяющимся расстоянием до оси вращения кривошипа 4. В конце своего перемещения вдоль винта 8 гайка 9 воздействует на переключатель I1, который изменяет направление вращения привода 10. Гайка 9 смещается в обратную сторону, точно также в обратную сторону смещается и амплитуда движения
ползуна 3. (
Механизм в варианте на фиг. 2 работает аналогично с той лишь разницей, что гайка 9 неподвижно закреплена на основании 1, а кривошип 4 и установленный на его конце шарнир 7 совершают реверсивное винтовое движение.
Формула изобретения
1.Реверсивный кривошипно-ползун- ный механизм, содержащий основание с прямолинейной направляющей, .установленный в направляющей -ползун, установленный на основании кривошип, шатун, шарнирно связанный с кривошипом и ползуном, и устройство смеще- , ния начальной точки хода ползуна в виде винтовой пары, на поступатель-; но движущемся элементе которой зак- реплен шарнир, связывающий кривошип
с шатуном, отличающийся тем, что, с целью расширения кинематических возможностей, винт устройства смещения начальной точки хода ползуна жестко связан с кривошипом, ось винта параллельна оси вращения кривошипа, а механизм снабжен переключателем направления вращения кривошипа, предназначенным для взаимодействия с поступательно движущимся элементом винтовой пары.
2.Механизм по п. 1,отлича- ю щ и и с я тем, что гайка винтовой пары связана с основанием, а ось винта совмещена с осью вращения кривошипа.
5д ;
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1990 |
|
RU2017038C1 |
| Кривошипно-ползунный механизм | 1989 |
|
SU1656247A1 |
| Кривошипно-ползунный механизм Сухих | 1990 |
|
SU1805254A1 |
| РЕВЕРСИВНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2011 |
|
RU2479768C1 |
| Шарнирно-рычажный механизм прерывистой подачи | 1986 |
|
SU1364797A1 |
| Механизм преобразования вращательного движения в возвратно-поступательное | 1986 |
|
SU1379533A1 |
| Устройство для резки | 1973 |
|
SU515600A1 |
| Кривошипно-кулисный механизм с равномерным ходом ползуна | 1984 |
|
SU1186874A1 |
| КОНЦЕНТРАЦИОННЫЙ СТОЛ | 1999 |
|
RU2162016C2 |
| КОСТЫЛЕЗАБИВЩИК ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ | 2005 |
|
RU2284387C1 |
Изобретение относится к криво- шипно-ползунным преобразователям движения и найдет применение в устройствах со смещаемой амплитудой возвратно-поступательного движения выходного звена. Цель изобретения расширение кинематических возможностей механизма за счет смещения амплитуды на ходу и обеспечения реверса выходного звена. При вращении кривошипа 4 жестко связанный с ним винт 8, ось которого.параллельна оси вращения кривошипа, вращается относительно гайки 9. Гайка 9 и установленный на ней щарнир 7 смещаются вдоль винта 8. В результате шатун 5 располагается под углом к продольной оси направляющей 2, и расстояние между осью винта 8 и центром шарнира 6 становится меньше длины шатуна 5. В итоге ползун 3 совершает возвратно- поступательное движение в направля- i ющей 2 с постоянной амплитудой и с изменяющимся расстоянием до оси вращения кривошипа 4. 1 з.п. ф-лы, 2 ил. i Ш
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Фальцовая черепица | 0 |
|
SU75A1 |
| Бетонный столб с металлической оболочкой | 1925 |
|
SU976A1 |
