Изобретение относится к кривошипно-ползунным преобразователям движения и найдет применение в устройствах, у которых на возвратно-поступательное движение ведомого ползуна накладывается его непрерывное поступательное смещение.
Известен кривошипно-ползунный механизм [1], содержащий стойку с прямолинейной направляющей, установленный в направляющей ползун, кривошип, соединенный со стойкой вращательной парой, и шатун, шарнирно связанный с кривошипом и ползуном. Кинематические возможности этого механизма крайне ограничены лишь прямолинейным возвратно-поступательным характером движения выходного ползуна.
Известен также кривошипно-ползунный механизм [2], содержащий стойку с прямолинейной направляющей, установленный в направляющей ползун, кривошип, соединенный со стойкой с помощью винтовой пары, и шатун, шарнирно связанный с кривошипом и ползуном принят за прототип. Кинематические возможности этого механизма расширены за счет наложения на прямолинейное возвратно-поступательное перемещение выходного ползуна поступательного перемещения с постоянной скоростью. Однако это расширение относительно невелико, скорости составляющих движения нерегулируемы.
Цель изобретения - расширение кинематических возможностей механизма за счет реализации регулируемости хода возвратно-поступательного движения ползуна с наложением на него непрерывного поступательного движения.
Поставленная цель достигается тем, что кривошипно-ползунный механизм, содержащий стойку с прямолинейной направляющей, установленный в направляющей ползун, кривошип, соединенный со стойкой с помощью винтовой пары, и шатун, шарнирно связанный с кривошипом и ползуном, снабжен двумя дополнительными стойками с соответствующими направляющими, установленными перпендикулярно основной стойке на ее концах, двумя парами губок, установленными в соответствующих направляющих дополнительных стоек с возможностью вращения и последующей фиксации, предназначенными для взаимодействия соответственно с концом винта винтовой пары и основной стойки, а ось винта наклонена под острым углом к оси основной стойки.
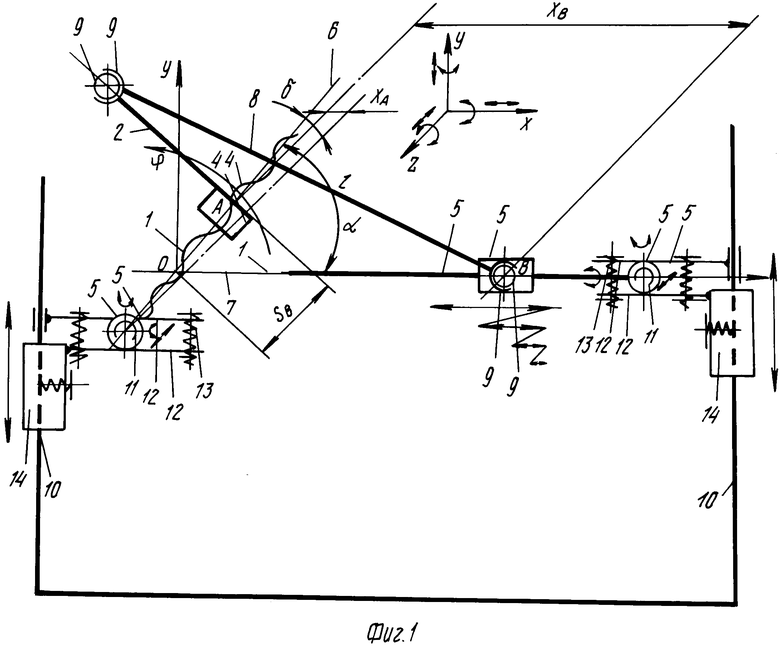
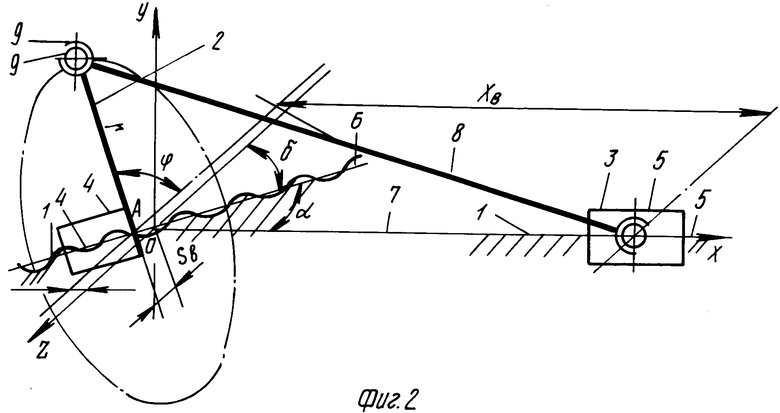
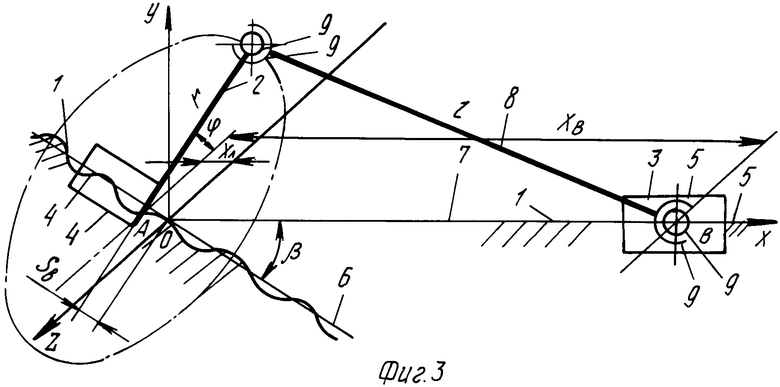
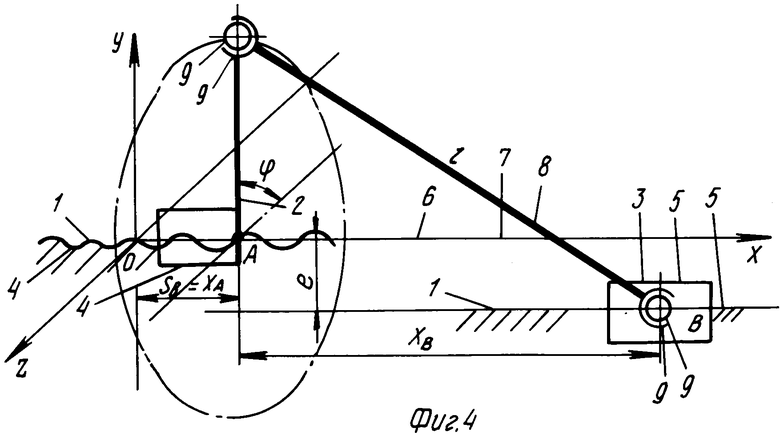
На фиг. 1 показана структурная схема кривошипно-ползунного механизма; на фиг. 2 - то же, в сборке с перекрещивающимися осями соединения кривошипа и ползуна со стойкой; на фиг. 3 - то же, с пересекающимися осями; на фиг. 4 - то же, с параллельными осями.
Кривошипно-ползунный механизм содержит стойку 1 с прямолинейной направляющей, установленной в направляющей ползун 3, кривошип 2, соединенный со стойкой с помощью винтовой пары 4, и шатун, шарнирно связанный с кривошипом и ползуном. Последний со стойкой образует поступательную кинематическую пару 5. Винтовая пара 4 и поступательная пара 5 выполнены с возможностью поступательного смещения по трем координатным осям декартовой системы координат и поворота относительно этих осей так, что ось 6 винтовой пары и ось 7 поступательной пары устанавливают или соосно друг другу или параллельно друг другу несоосно, или пересекающимися (ортогонально или неортогонально). Шатун 8 соединен с кривошипом и ползуном сферическим 9 или сферическим с пальцем шарниром. Для реализации вышеуказанной возможности механизм снабжен двумя дополнительными стойками 10 с соответствующими направляющими, установленными перпендикулярно основной стойке на ее концах. Конец винта винтовой пары и конец основной стойки снабжены шаровыми элементами 11. Механизм снабжен двумя парами губок 12, установленных в соответствующих направляющих дополнительных стоек с возможностью вращения и последующей фиксации фиксаторами 13 и 14. Пары губок предназначены для взаимодействия с концом 11 винта винтовой пары 4 и основной стойкой 1. Ось винта наклонена под острым углом к оси основной стойки. При ослабленных фиксаторах 14 элементы 10, 11 и 12 образуют поступательную и вращательную многоподвижную пару.
Кривошипно-ползунный механизм работает следующим образом.
Вначале ослабляют фиксаторы 13 и 14 и смещением и поворотом шаровых элементов 11 винта и основной стойки 1 относительно губок 12 и губок относительно направляющих дополнительных стоек устанавливают требуемое относительное положение звеньев, требуемый острый угол наклона оси винта 6 к оси 7 основной стойки. Далее вращение кривошипа 2 через шатун 8 преобразуют в рабочее движение ведомого ползуна 3. Возвратно-поступательное перемещения последнего изменится за счет поступательного перемещения (естественно ограниченного длиной винта) гайки по винту. Рабочее перемещение ползуна зависит от угла α - угла перекрещивания или пересечения вышеуказанных осей. Так, при сборке по фиг. 2, когда оси перекрещиваются, перемещение ползуна в функции угла поворота кривошипа определится по следующей формуле:
X
 ϕPsinδ·cosβ;;
ϕPsinδ·cosβ;; , где Р - шаг винта; Z - число его заходов; δ - угол, который ось 6 в горизонтальной плоскости XZ составляет с осью Z; β- угол, который в вертикальной плоскости XY проекции оси 6 на эту плоскость составляет с осью Х; r и l - длины кривошипа и шатуна; е - величина эксцентриситета. При сборке по фиг. 3, когда оси пересекаются:
, где Р - шаг винта; Z - число его заходов; δ - угол, который ось 6 в горизонтальной плоскости XZ составляет с осью Z; β- угол, который в вертикальной плоскости XY проекции оси 6 на эту плоскость составляет с осью Х; r и l - длины кривошипа и шатуна; е - величина эксцентриситета. При сборке по фиг. 3, когда оси пересекаются:
X P·cosβ
P·cosβ  ;;
;;
X r·sinβ+
r·sinβ+ .
.
Для сравнения - при сборке, когда оси 6 и 7 перпендикулярны:
XA = 0;
X r·cosϕ+
r·cosϕ+ ;;
;;
при сборке, когда оси параллельны и несоосны (фиг. 4):
X
 ·
·  ;;
;;
X ;;
;;
при сборке, когда оси расположены на одной прямой (соосны):
XA=XB=  ·
·  ..
..
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный кривошипно-ползунный механизм | 1986 |
|
SU1404712A1 |
| Кривошипно-ползунный механизм | 1989 |
|
SU1656247A1 |
| РЕВЕРСИВНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2011 |
|
RU2479768C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
| Кривошипно-ползунный механизм Сухих | 1990 |
|
SU1805254A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| СПОСОБ ФРЕЗЕРОВАНИЯ ВИНТОВ С КРУГЛОЙ ВИНТОВОЙ ПОВЕРХНОСТЬЮ | 2006 |
|
RU2306199C1 |
| СПОСОБ ОБРАБОТКИ КОМПЛЕКТА ВИНТОВ | 2008 |
|
RU2381877C1 |
| УСТРОЙСТВО ДЛЯ ФРЕЗЕРОВАНИЯ ВИНТОВ С КРУГЛОЙ ВИНТОВОЙ ПОВЕРХНОСТЬЮ | 2006 |
|
RU2306200C1 |
Использование: в прессах и транспортных средствах. Цель изобретения - расширение кинематических возможностей. Механизм снабжается двумя дополнительными стойками с соответствующими направляющими, установленными перпендикулярно стойке, двумя парами губок, установленными на соответствующих направляющих с возможностью вращения и последующей фиксации, предназначенными для взаимодействия с концом винта винтовой пары и основной стойки, а ось винта наклонена под острым углом к оси основной стойки. Вращение кривошипа через шатун преобразуют в рабочее движение ведомого ползуна. 4 ил.
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ, содержащий стойку с прямолинейной направляющей, установленный в направляющей ползун, кривошип, соединенный со стойкой с помощью винтовой пары, и шатун, шарнирно связанный с кривошипом и ползуном, отличающийся тем, что, с целью расширения кинематических возможностей, механизм снабжен двумя дополнительными стойками с соответствующими направляющими, установленными перпендикулярно к основной стойке на ее концах, двумя парами губок, установленными в соответствующих направляющих дополнительных стоек с возможностью вращения и последующей фиксации, предназначенных для взаимодействия соответственно с концом винта винтовой пары и основной стойки, а ось винта наклонена под острым углом к оси основной стойки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Реверсивный кривошипно-ползунный механизм | 1986 |
|
SU1404712A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
