00
о
4 Ю СЛ
которой соединен с линиями 5, 6 размыкания тормозов через центральный коллектор. Линия 14 и 15 уменьшения рабочего объема гидромоторов 1, 2 соединены с линиями 5, б растормаживания тормозов 3, 4. Давление, необходимое для размыкания тормозов, выбрано ниже диапазона редуцированного
давления регулирования положения силовых золотников, а давление, необходимое для .переключений гидромоторое с полного рабочего объема на уменьшенный, выбрано выше диапазона редуцированного давления регулирования положения силовых золотников. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод механизма передвижения гусеничного экскаватора | 1990 |
|
SU1758294A1 |
| Система сервоуправления гидроприводом экскаватора | 1983 |
|
SU1079780A1 |
| Гидропривод одноковшового экскаватора | 1989 |
|
SU1691485A1 |
| Система сервоуправления гидроприводом экскаватора | 1975 |
|
SU610950A1 |
| ГИДРОПРИВОД ЭКСКАВАТОРА | 1990 |
|
RU2041323C1 |
| Механизм натяжения гусеничной ленты экскаватора | 1991 |
|
SU1836529A3 |
| Система сервоуправления гидроприводом экскаватора | 1977 |
|
SU763539A1 |
| Гидропривод одноковшового экскаватора с рекуперацией энергии | 1986 |
|
SU1382920A1 |
| Гидравлический привод экскаватора | 1982 |
|
SU1105578A1 |
| ПНЕВМОКОЛЕСНЫЙ ЭКСКАВАТОР | 2000 |
|
RU2184193C2 |
Изобретение относится к гидроприводам строительно-дорожных и горных машин, а именно экскаваторов, и может быть использовано в качестве привода их ходовых систем. Цель изобретения - увеличение скорости диапазона передвижения экскаватора. Гидропривод механизма передвижения содержит ступенчато регулируемые гидромоторы 1,2с нормально замкнутыми тормозами 3,4, расположенные на редукторах правой и левой гусениц. Гидролинии 5, 6 управления размыканием тормозов 3, 4 объединены гидролинией и выведены через канал центрального коллектора на поворотную платформу, где расположёны силовые золотники 7 и 8 питания гидромоторов со своими гидролиниями 9, 10, 11 и 12 серво- управления. Эти гидролинии соединены с пирамидой 13 из трех клапанов ИЛИ, отвод . .4 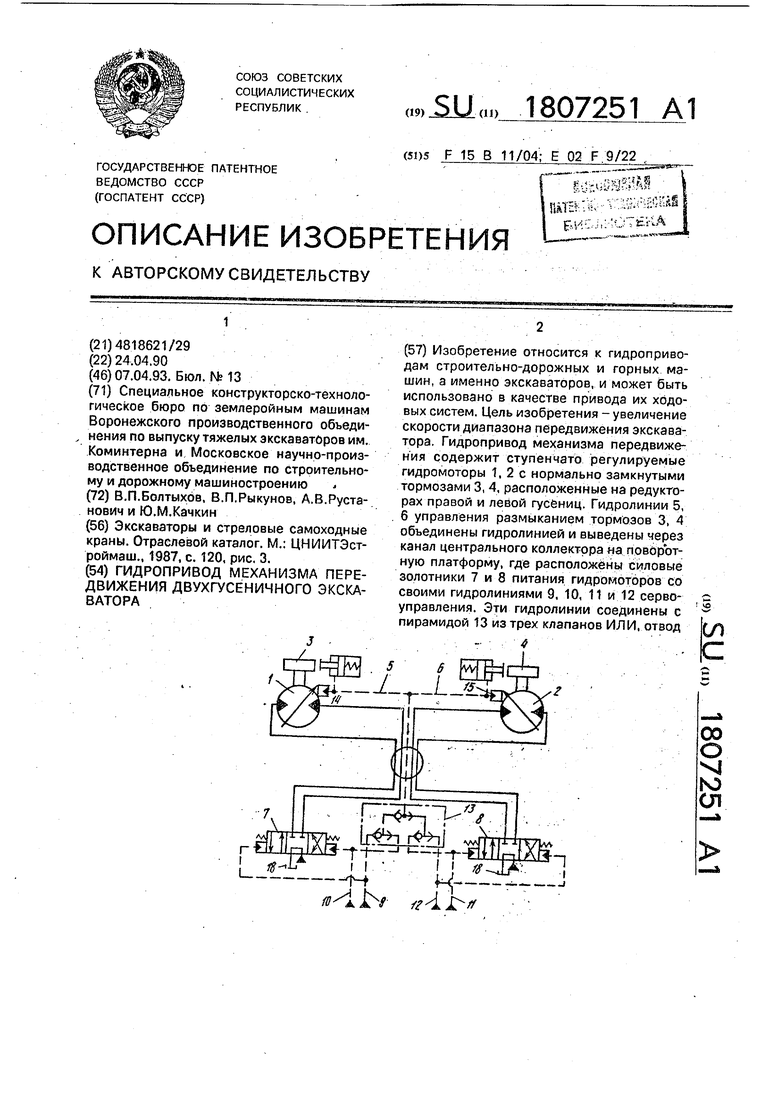
Изобретение относится к гидроприводам строительно-дорожных машин, в частности экскаваторов, и может быть использовано в качестве привода их ходовых систем.
Цель изобретения - увеличение скоростного диапазона передвижения экскаватора без усложнения работы машиниста и конструкций системы сервоуправления и центрального коллектора.
На чертеже представлена схема предложенного гидропривода.
Гидропривод механизма передвижения двухгусеничного экскаватора содержит два гидромотора 1 и 2, два нормально замкнутых тормоза 3 и 4 с линиями 5 и 6 управления их размыканием, два силовых золотника 7 и 8 гидрораспределителей с линиями 9,10,11 и 12 из пропорционального сервоуправления, соединенными через пирамиду 13 клапанов ИЛИ с линиями 5 и 6 управления размыканием тормозов 3 и 4.
Гидромоторы 1 и 2 выполнены регулируемыми с линиями 14 и 15 управления их рабочим органом, которые соединены с соответствующими линиями 5 и б управления размыканием тормозов 3 и 4.
Давление, необходимое для размыкания тормозов 3 и 4, выбрано ниже диапазона редуцированного давления для регулирования положения золотников 7 и 8, а давление, необходимое для переключения рабочих объемов гидромоторов 1 и 2, выбрано выше.
Гидропривод работает следующим образом.
В исходном положении гидролинии 9, 10, 11 и 12 сервоуправления соединены с баком, и давление в них отсутствует. Поэтому оба силовых золотника 7 и 8 под действием установочных пружин занимают нейтральное положение, показанное на чертеже, т.е. подводимые к ним силовые потоки (условно показаны черным треугольником) направляются на слив, а рабочие линии гидромоторов 1,2 запреты. Гидролинии 5, б управления растормаживанием тормозов 3, 4 и соединенные с ними гидролинии 14 и 15 управления уменьшения рабочего объема
гидромоторов 1, 2 через центральный коллектор и пирамиду 13 клапанов ИЛИ соединены также с гидробаком, т.к. с гидробаком соединены гидролинии 9, 10, 11 и 12 сервоуправления, выведенные ко все четырем входам пирамиды 13 клапанов ИЛИ. Это означает, что тормоза 3 и 4 заторможены, а рабочие объемы гидромоторов 1, 2 имеют максимальное значение.
.При подаче небольшого (например, 1,0 .,. 1,6 МПа) давления сервоуправления в какую-либо из гидролиний 9,10,11 и 12 сервоуправления силовыми золотниками 7 и 8, например гидролинию 9, золотник 7 сдвинется вправо, и один из силовых потоков поступает через центральный коллектор к гидромотору 1 и от него основа через центральный коллектор и силовой золотник 7 в гидробак. При этом давление сервоуправления от линии 9 через пирамиду 13 клапанов ИЛИ и центральный коллектор поступает к линиям 5, б и растормаживает тормоза 3 и 4, что позволяет гидромотору 1 начать вращение, т.е. одна из гусениц приходит в движение. Это движение происходит с малой скоростью, соответствующей максимальному значению рабочего объема гидромотора, т.к. давление в гидролинии 14 управления его рабочим объемом равно давлению в гидролинии 5 (1,0 ... 1,6 МПа), т.е. не достигло давления, выбранного для срабатывания переключения рабочего объема, например, 2,0 МПа, заведомо большего, чем необходимо для растормаживзния тормоза (0,6 МПа)
и полного включения силового золотника (1,6 МПа). При дальнейшем воздействии-на командоаппарат сервоуправления, питающий гидролинию 9, машинист может увеличить давление в ней до максимальной
величины (25 ... 3,0 МПа), что вызовет соответствующее увеличение давления в линиях 5, б, 14 и 15, и тогда рабочие объемы гидромоторов 1, 2 уменьшатся до минимального значения, а движение гусеницы, связанной
с гидромотором 1, ускорится до максимальной скорости.
Аналогично при подаче пропорционального давления в одну из линий сервоуправления золотником 8 происходит
растормаживание тормозов 3, 4 и включение с увеличенной или уменьшенной скоростью гидр омотора 2, т.е. вторая гусеница происходит в движение с увеличенной или с уменьшенной скоростью.
Таким образом машинист получает возможность теми же командоаппаратами, которыми он управляет включением силовых золотников, т.е. включением и направлением движения гусениц, производить не толь- ко автоматическое растормаживание тормозов, но и принудительное (произвольное) изменение рабочего объема гидромоторов, т.е. ступенчатое объемное регулирование скорости гусениц, тем са- мым расширяется скоростной диапазон механизма передвижения экскаватора без изменения пульта управления, центрального коллектора и практически без изменения разводки гидролиний.
При использовании в народном хозяйстве объекта изобретения достигается увеличение скоростного диапазона механизма передвижения экскаватора наиболее дешевыми средствами, что позволяет увеличить производительность машины без значительного увеличения затрат на усложнение управления и без увеличения психофизической нагрузки машиниста.
Формула изобретения
| Экскаваторы и стреловые самоходные краны | |||
| Отраслевой каталог | |||
| М.: ЦНИИТЭст- роймаш., 1987, с | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
