ел
с

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления выбором инструментов со свободным кодированием | 1989 |
|
SU1675848A1 |
| Устройство для автоматического управления вращением объекта | 1991 |
|
SU1774309A1 |
| Устройство для автоматического управления инструментальным магазином | 1988 |
|
SU1593913A1 |
| Способ определения направления вращения инструментального магазина и устройство для его осуществления | 1988 |
|
SU1703265A1 |
| Система программного управления выбором инструмента | 1980 |
|
SU954944A1 |
| Способ управления вентильным преобразователем | 1985 |
|
SU1319200A1 |
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Устройство для контроля электрических параметров полупроводниковых диодов | 1983 |
|
SU1138768A1 |
| Система управления гидроагрегатом правки цилиндрических заготовок | 1981 |
|
SU1009555A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |

Использование: станкостроение, устройства автоматической смены инструментов. Сущность изобретения: устройство в дополнение к уже имеющимся блокам имеет преобразователь кода, схему задержки, блок памяти и элемент И, Вход преобразователя кодов подключен к выходу блока задания программы, а выход преобразователя кодов - ко второму входу сумматора. Четвертый выход сумматора посредством схемы задержки соединен со входом блока памяти, выход которого соединен с четвертым входом схемы управления приводом вращения и первым входом элемента И. Второй вход элемента И соединен с датчиком контроля остановки, а выход - с пятым входом схемы управления. 3 ил.
Изобретение относится к управлению промышленными механизмами и может быть использовано, в частности, для автомат тического определения направления вращения инструментальных магазинов станков с ЧПУ по кратчайшему пути.
Целью изобретения является повышение надежности за счет снижения ди- на мических нагрузок путем обеспечения формирования сигнала замедленного вращения магазина при подходе к позиции остановки для смены инструмента, а также за счет упрощения структуры устройства.
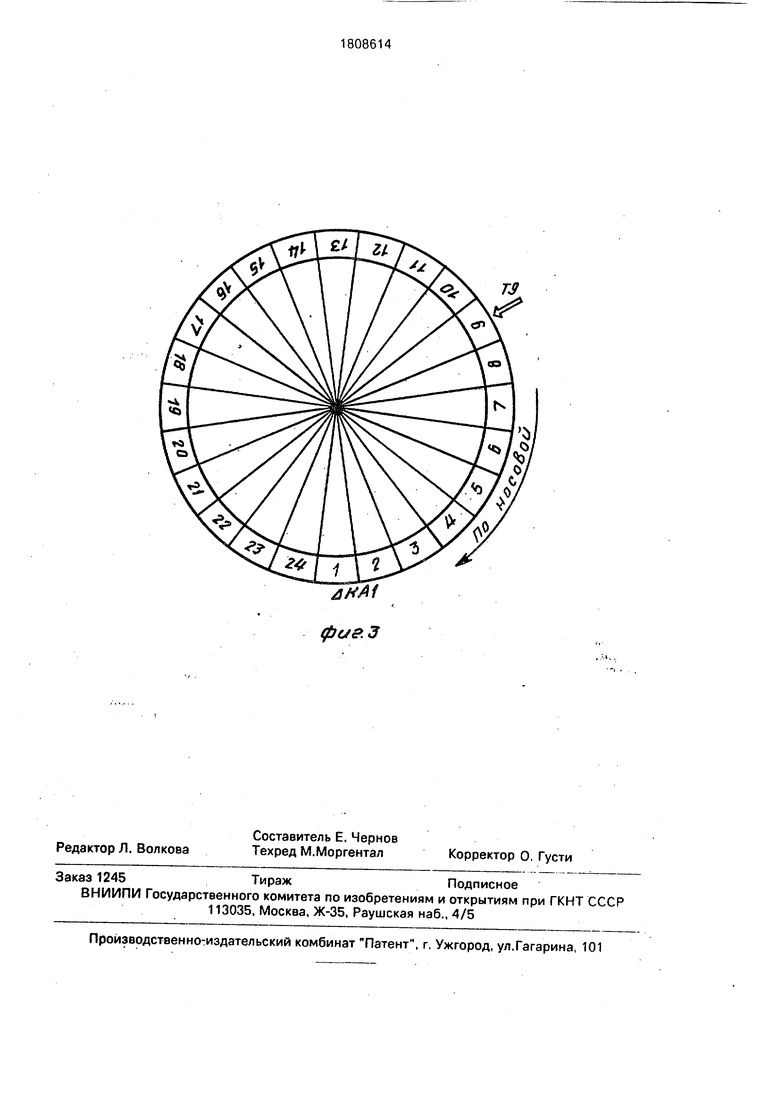
На фиг. 1 дана структурная схема устройства; на фиг. 2 - диаграмма работы устройства; на фиг. 3 -аппликация магазина и принцип определения кратчайшего направления вращением.
Устройство для автоматического выбора наименьшего угла поворота вращающегося узла станка содержит задатчик 1, формирующий двоично-десятичный (ВСД) код задания инструмента, подлежащего поиску, и сигнал считывания То. В соответствии с международными стандартами кодирование .осуществляется по адресу Т; командо- аппарат .2 КА, также выполненный в ВСД-коде и предназначенный для идентификации гнезд магазина; преобразователь 3 кода задания, формирующий в зависимости от направления вращения код (Tn ± 1), позволяющий синтезировать сигнал совпадения кодов за один шаг до остановки; сумматор 4, формирующий абсолютную разность сигналов задания и идентификации Д IТ-КА I, а также сигналы Т КА, Т КА и Т КА (СОВП); память 5 числа инструментальных гнезд в магазине; блок 5 сравнения на большее и меньшее значение,
со
О
оо о
ормирующий выходные сигналы
-IT-; логический элемент 7 И-ИЛИ-НЕ;
S-триггер 8; схему 9 задержки А т; память 10 сигнала совпадения кодов задания и дентификации СОВП; логический 11 элеент И; схему 12 управления приводом вращения магазина; инструментальный 13 агазин; датчик 14 контроля остановки.
Перечисленные элементы устройства в статическом положении связаны между со- бой следуюи им образом.
Первый выход блока задания 1 формирует задающий сигнал быстрого вращения (БВ) для схемы 12 управления приводом вращения инструментального 13 магазина, ВСД-код задатчика 1 поступает на первый вход схемы 4 сумматора, а так же на схему 3 преобразования кодов, управляемую сигналами триггера 8, выход преобразователя 3 кодов соединен со вторым входом схемы А сумматора, на третий вход которого поступает ВСД-код командоаппарата 2, идентифицирующего фактическое положение
,/ N магазина. Код числа инструментальных
гнезд магазина из памяти 5 поступает на первый вход блока 6 сравнения, на второй вход которого поступает модуль разности кодов задания и идентификации А 1T-KAI со схемы 4 сумматора, сигналы результатов
сравнения А -тт- л А -п- поступают на
первые входы А элемента 7 И-ИЛИ-НЕ, на вторые входы которых подаются, соответственно, выходные сигналы и схемы 4 сумматора, а на третьи входы внешний сигнал разрешения ВРАЩ. Выход элемента 7 И-ИЛИ-НЕ. формирующий рабочий сигнал вращения против часовой стрелки поступает из вход установки RS-триггера 8, выхоДы которого, формируя сигналы ПРОТИВ и ПО, поступают на второй и третий входы схемы 12 управления приводом вращения, соответственно; четвертый выход схемы 4 сумматора, формирующий сигнал совпадения кодов задания и идентифика- .ции СОВП (Тп ± 1) н КА через схему 9 задержки At соединен с блоком 10 памяти сигнала совпадения, выход которого формирует сигнал замедления ЗАМ и поступает на четвертый вход схемы 12 управления привода вращения, а так же на первый вход логического 11 элемента И, на второй вход которого подается сигнал датчика 14 контроля остановки, а выход логического 11 элемента И формирует сигнал остановки ОСТ и подается на пятый вход схемы 12 управлеN ..
ния приводом вращения инструментального 13 магазина.
Устройство работает следующим обра5 зом.
При включении питания сигнал начальной установки НУ сбрасывает триггер памяти 10 сигнала совпадения, формируя . Триггер 8 устанавливается в состо10 Яние , ПРОТИВ 1. Поскольку сигналы ПО и ПРОТИВ являются чисто информационными, а сигнал Т0 (БВ)0, то они не приводят к вращению магазина 13. По команде управляющей программы или в наладочном
15 режиме задатчик 1 формирует ВСД-код задания инструмента, подлежащего поиску Т1, Т2, Т4, Т8, Т10, Т20, Т40 и Т80, а также через выдержку времени сигнал считывания То. При этом задатчик-1, командоаппарат 2,
20 сумматор 4, память 5, блок сравнения 6, элемент И-ИЛИ-НЕ 7 при условии наличия сигнала разрешения ВРАЩ 1 формирует сигнал вращения по кратчайшему пути в соответствии с алгоритмом (см. фиг. 3);
25 - Вращение по часовой стрелке ПО,
N 2
если ТЖА и Т-КА
КА0
5
0
5
0
5
,т.е.
;-),)-(),
ПО (Т КА)-(А гдеД |Т-КА|.
- Вращение против часовой стрелки ПРОТИВ ПО, ПРОТИВ
ПО - (Т КА) N,
(
+ () -(А 4), что дает возможность применить стандартную микросхему И-ИЛИ- НЕ. Таким образом, если логический 7 элемент И-ИЛИ-НЕ формирует сигнал , то состояние триггера 8 не изменяется и ПРОТИВ 1, вращение против часовой стрелки. Если же элемент И-ИЛИ- НЕ формирует сигнал , то триггер 8 изменяет свое состояние , ПРОТИВ 0, вращение по часовой стрелке. По сигналу То(БВ) схема 12 управления приводом вращения при наличии разрешающих блокировок расфиксирует (сигнал РАСФ) магазин и при наличии сигнала контроля расфикса- ции Красф включает быстрое вращение (см. фиг. 2), Тип привода вращения, элек-- трический или гидравлический, принци- пиэльного значения не имеет. Сигнал вращения ВРАЩ - 0 блокирует выход элемента 7 И-ИЛИ-НЕ, исключая возможное изменение состояния триггера 8. На каждом шаге магазина 13 при его вращении схемой 4 сумматора-сравнения осуществляется
сравнение кода командоаппарата КА и выходного кода преобразователя 3 кодов, формирующего ВСД-код, вес которого в зависимости от направления вращения на единицу больше пли меньше кода задатчика 1, Это необ- ходимо для формирования сигнала совпадения кодов за один шаг до остановки магазина, т.е.
COBn-{(KA|STi-t)-nO+
+ (КА|5Пн-1)-ПРОТИВ1-ВРАЩ.
Здесь сигнал ВРАЩ - вспомогательный блокировочный сигнал, формируемый схе- мой 12 управления приводом вращения. При совпадении кодов сигнал СОВП-1 и через выдержку времени Аг включается память 10 сигнала совпадения, формируя сигнал замедления ЗАМ 1 для схемы 12 управления приводом вращения. Выдержка времени Аг необходима для исключения действия сигнала датчика 14 контроля остановки в момент сравнения. Магазин замедляется и на следующем шаге схема 11 элемента И формирует сигнал остановки ОСТ-ЗАМ -Кост. Магазин останавливается и фиксируется (Кфикс). При этом снимается сигнал вращения, сбрасываются триггеры 8 формирования сигналов направления вращения и 9 памяти сигнала совпадения кодов. Устройство готово к новому циклу работы.
Все блоки устройства выполнены на типовых известных элементах, принципы по- строения которых шарнирно описаны в специальной технической литературе и учебниках, поэтому нет необходимости приводить их принципиальные схемы. 1) Блок задания 1 - это наборное поле из коммутационных элементов, например, промышленного галетного переключателя в ВСД-коде или устройство числового программного управления, .
2) Командоа ппарат 2 - это набор контак- тных или бесконтактных выключателей.
3) Преобразователь кода 3, сумматор 4, блок сравнения 6 выполнены по классическим описанным принципам.
4) Память 5 числа гнезд в магазине - это набор типовых RS-триггеров или других коммутационных аппаратов, например, перемычек на логические ноль и единицу.
5) Логический элемент 7 И-ИЛИ-НЕ - типовая микросхема.
6) Памяти 8 и 10 - типовые RS-триггеры,
7) Временной элемент 9 - типовая схема задержки переднего фронта, основанная на заряде конденсатора.
5
0
5 0 5 0
5
0
5
0
5
8) Логический 11 элемент И - типовая микросхема..
9) Схема управления приводом вращения в предмет изобретения не входит, её построение зависит от конкретной конструкции инструментального магазина и типа привода, электрического или гидравлического. Схемы стыковки промышленных электроприводов также подробно описаны.
10) Датчик 14 контроля остановки -микропереключатель или любой бесконтактный промышленный датчик.
Экономический эффект от внедрения заявляемого изобретения по сравнению с прототипом достигается за счет снижения требований по жесткости конструкции инструментального магазина, увеличения сроков его работы и повышения надежности, что объясняется введение замедленной подачи при подходе к позиции остановки, обеспечивающий точный останов и снижение динамических нагрузок. Итоговый результат - повышение надежности и производительности работы. Ориентировочная потребность народного хозяйства в подобных устройствах составляет тысячи штук в год.
Формул а изо б ре те ни я
Устройство для автоматического выбора наименьшего угла поворота вращающегося узла станка, преимущественно магазина инструментов станков с ЧПУ, содержащее электрически связанные блок памяти, блоки задания программы и идентификации фактического положения магазина, последовательно соединенные сумматор, блок сравнения, элемент И-ИЛИ-НЕ и схему управления приводом,вращения, о т л и ч а ю Щ е вся тем, что, с целью повышения надежности за счет снижения динамических нагрузок путем обеспечения формирования сигнала замедленного вращения магазина при подходе к позиций остановки для смены инструмента, оно снабжено преобразователем кода, схемой задержки, блоком памяти и элементом И, причем вход преобразователя кодов подключен к выходу блока задания программы, а выход преобразователя кодов - к второму входу сумматора, а четвертый выход сумматора посредством схемы задержки соединен с входом блока памяти, выход которого соединён с четвертым входом схемы управления приводом вращения и первым входом элемента И, торой вход которого соединен с дополнительно введенным датчиком контроля остановки, а выход - с пятым входом упомянутой схемы управления.
13 &
щ.
| Устройство для выбора наименьшего угла поворота вращающегося узла станка | 1976 |
|
SU643837A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
