рым входам первого и второго элементов ИЛИ, первый и второй выходы третьего
блока памяти соединены с третьими входами первого и второго элементов ИЛИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Электрофотометр для наблюдения движущихся объектов | 1991 |
|
SU1787264A3 |
| Система управления телескопом | 1978 |
|
SU805251A1 |
| Телескоп | 1983 |
|
SU1108379A1 |
| Устройство для полуавтоматической коррекции положения телескопа | 1974 |
|
SU601668A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕСКОПОМ, содержащая светоприемник, блок сравнения, блок коррекции, первый, второй, третий элементы И, первый счетчик, первый привод, вал которого кинематически связан с первым валом телескопа и с валом первого преобразователя угол-код, соединенного выходом с первым входом первого сумматора, вторым входом подключенного к выходу второго счетчика, соединенного первым входом с выходом четвертого элемента И, второй привод, вал которого кинематически связан с вторым валом телескопа и с валом второго преобразователя угол-код, соединенного выходом с первым входом второго сумматора, подключенного вторым входом к выходу третьего счетчика, соединенного первым входом с выходом пятого элемента И, отличающаяся тем, что, с целью повышения быстродействия системь, в ней дополнительно установлены первый, второй и третий блоки памяти, первый, второй, третий и четвертый элементы ИЛИ, дешифратор, первый и второй дискриминаторы, третий р четвертый сумматоры, четвертый и пятый счетчики и блок задержки, соединенный входом с выходом светоприемника и с первыми входами первого, второго и третьего блоков памяти, а выходом - с первыми входами первого, четвертого и пятого счетчиков, второй вход четвертого счетчика подключен к первому входу системы и к вторым входам первого, второго, третьего и пятого счетчиков, третий вход - к выходу второго элемента И, а выход - к первому входу третьего сумматора, соединенного вторым входом с выходом первого элемента ИЛИ, а выходом - с вторыми входами первого, второго и третьего блоков памяти и с первым входом блока сравнения, подключенного вторым входом к второму входу системы, а выходом - к третьему входу первого сумматора, третий вход пятого счетчика подключен к выходу третьего элемента И, а выход - к первому входу четвертого сумматора, соединенного вторым входом с выходом, второго элемента ИЛИ, а выходом - с третьим входом второго сумматора и третьими входами первого, второго и третьего блоков памяти, подключенных четвертыми входами соответственно i к первому, третьему и второму выходам дешифратора, соединенного входом с пер(Л вым выходом первого счетчика, подключенного третьим входом к третьему входу системы, а вторым выходом - к первому входу первого элемента И, соединенного вторым входом через первый дискриминатор с выходом первого сумматора и с входом первого привода, третьим входом через второй дискриминатор - с выходом второго сумматора и входом второго привода, а выхо00 СХ) дом - с первым входом третьего элемента ИЛИ, подключенного вторым входом к выходу четвертого элемента ИЛИ, а выхоО5 дом - к электрическому входу светоприсо со емника, оптический вход которого и оптический вход блока коррекции оптически связаны с наблюдаемой звездой, первый выход блока коррекции соединен с входом четвертого элемента ИЛИ и с первыми входами второго, третьего, четвертого и пятого элементов И, второй выход - с вторыми входами второго и четвертого элементов И, а третий выход - с вторыми входами третьего и пятого элементов И, первый.и второй выходы первого блока памяти подключены к первым входам первого и второго элементов И, первый н второй выходы второго блоков памяти подключены к вто
1
Изобретение относится к астроприборостроению и может быть использовано для управления оптическими телескопами и установленными на них приемниками.
Цель изобретения - повышение быстродействия системы.
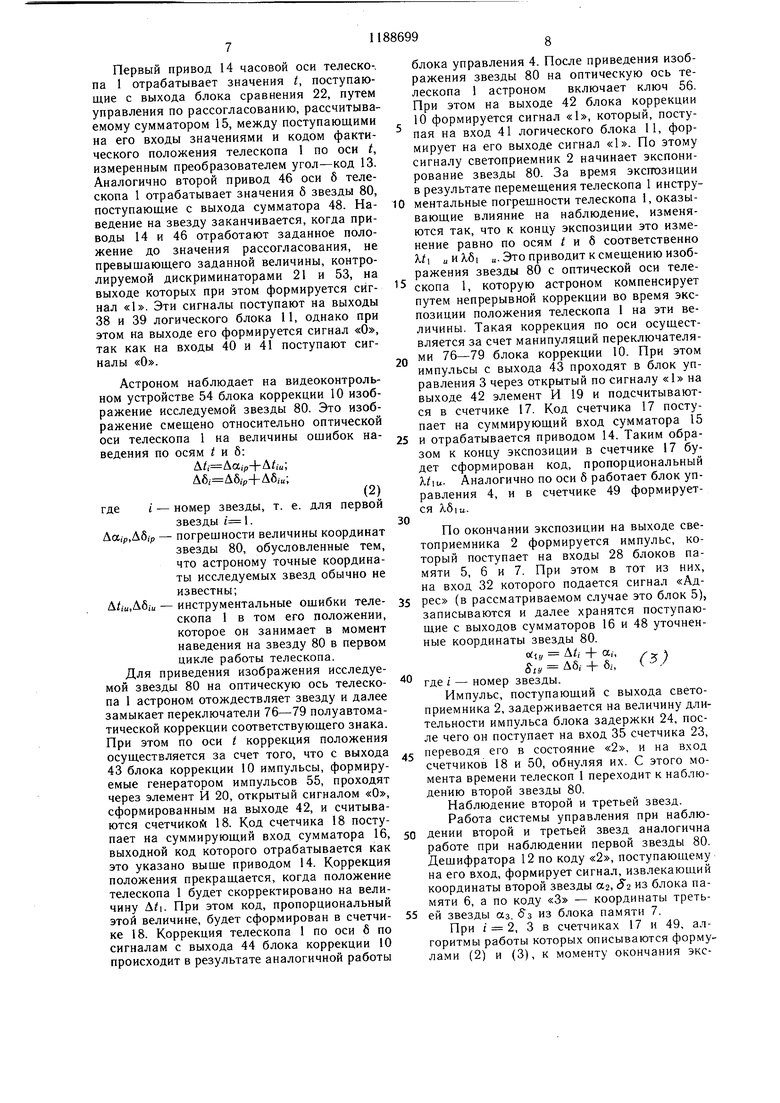
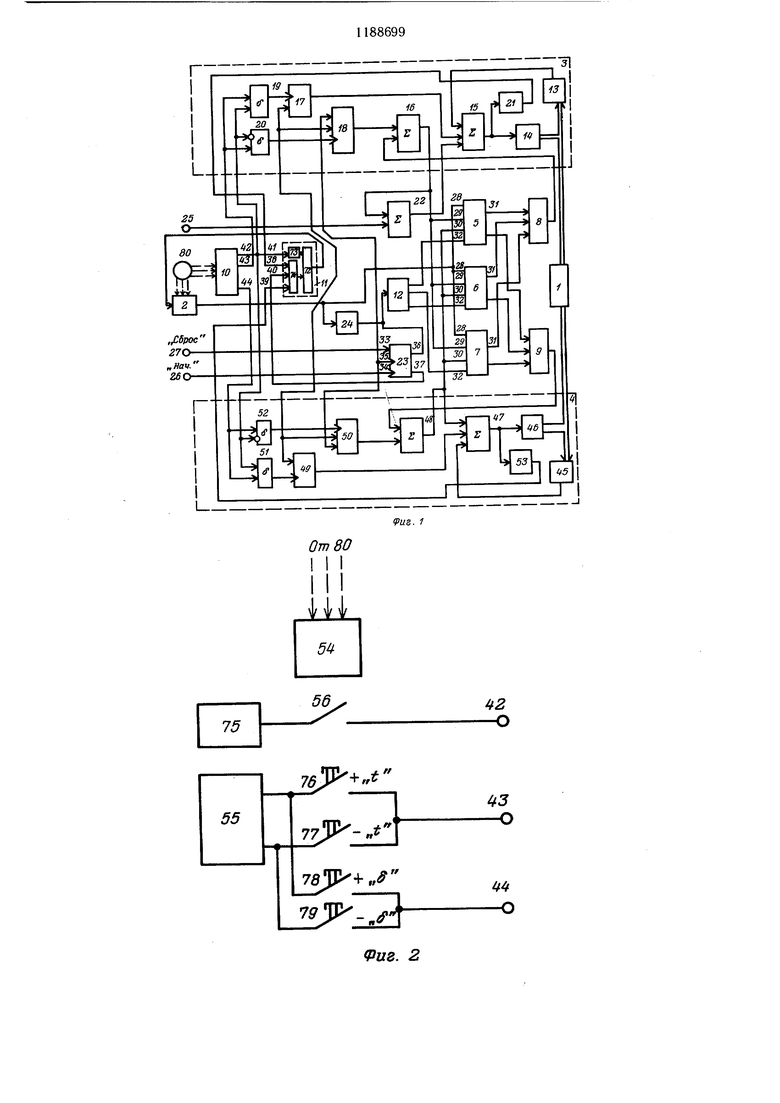
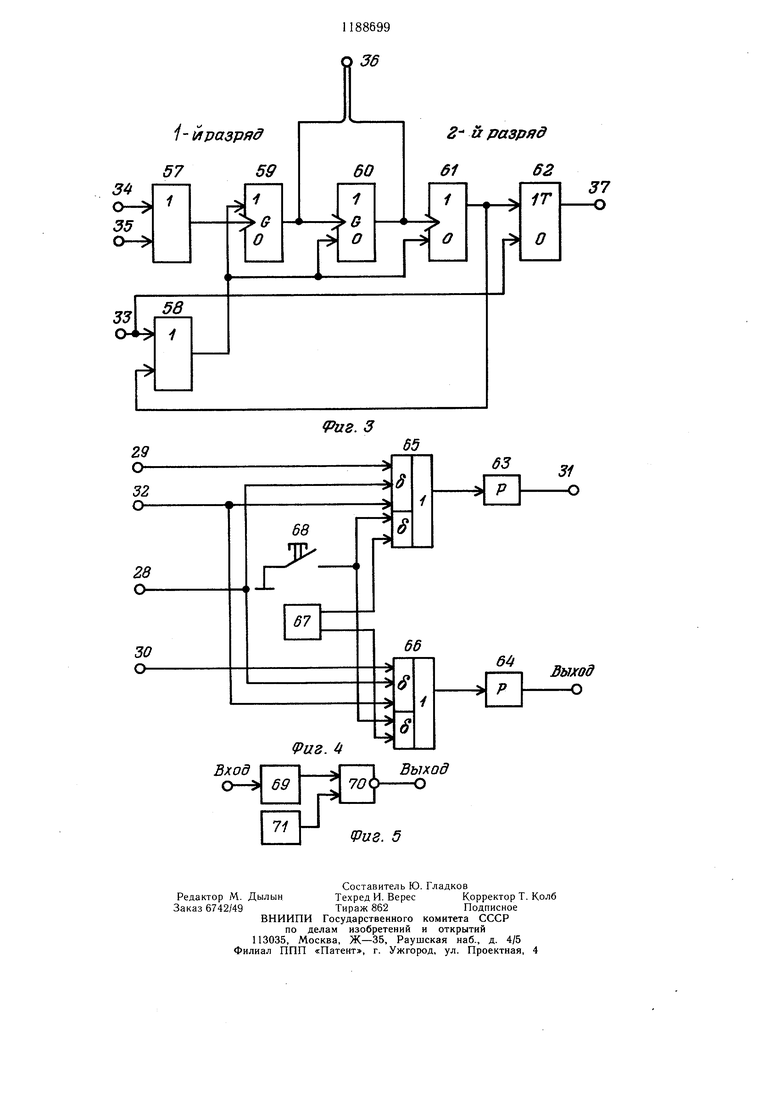
На фиг. 1 представлена функциональная схема систем,ы; на фиг. 2 - функциональная схема одного из вариантов выполнения блока коррекции; на фиг. 3 - функциональная схема счетчика; на фиг. 4 - функциональная схема одного из вариантов выполнения блоков памяти; на фиг. 5 - функциональная схема дискриминатора.
Система управления телескопом 1 содержит светоприемник 2, первый и второй блоки управления 3 и 4, первый, второй, третий блоки памяти 5, б и 7, первый и второй элементы ИЛИ 8 и 9, блок коррекции 10, логический блок 11, дешифратор 12, первый преобразователь угол-код 13, первый привод 14, первый сумматор 15, третий сумматор 16, второй и четвертый счетчики 17 и 18, четвертый и второй элементы И 19 и 20, первый дискриминатор 21, блок сравнения 22, первый счетчик 23, блок задержки 24, первый, третий и второй входы 25, 26 и 27 системы, первый, второй и третий входы, выход и четвертый вход 28, 29, 30, 31 и 32 блоков памяти 5, 6 и 7, второй, третий и первый входы, первый и второй выходы 33, 34, 35, 36 и 37 счетчика 23, второй, третий, первый и четвертый входы 38, 39, 40 и 41 логического блока 11, первый, второй и третий выходы 42, 43 и 44 блока коррекции 10, второй преобразователь угол-код 45, второй привод 46, второй и четвертый сумматоры 47 и 48, третий и пятый счетчики 49 и 50, пятый и третий элемент И 51 и 52, второй дискриминатор 53, видеоконтрольное устройство 54, генератор импульсов 55, ключ 56, элемент ИЛИ 57 и 58, триггеры 59, 60, 61 и 62, регистры 63 и 64, элементы ЗИ-2И-2ИЛИ 65 и 66, блок 67 задания двоичного кода, переключатель 68, блок 69 формирования абсолютной величины кода, элемент сравнения 70, элемент 71 формирования константы, третий и четвертый элементы ИЛИ 72 и 73, первый элемент И 74, источник постоянного напряжения 75, переключатели 76-79, звезду 80; б - координаты телескопа 1; S - звездное время.
Система управления телескопом 1 с установленным на нем светоприемником 2 содержит два идентичных блока управления 3 и 4, (в рассматриваемом случае на экваториальной монтировке первый блок управления 3 управляет телескопом 1 по оси t, второй блок управления 4 - по оси б), блоки памяти 5, 6 и 7, количество которых (в рассматриваемом случае 3) определяется системой звезд, а также первый элемент ИЛИ 8, второй элемент ИЛИ 9, блок коррекции 10, логический блок И, дешифратор 12.
Первый блок управления 3 содержит первый преобразователь угод-код 13, первый привод 14, первый сумматор 15, третий сумматор 16, второй счетчик 17, четвертый счетчик 18, четвертый элемент И 19, второй элемент И 20, первый дискриминатор 21.
На первый вход 25 системы поступает
величина звездного времени S, на третий
вход 26 - команда «Начало наблюдения,
на второй вход 27 - команда «Сброс.
Второй блок управления 4 содержит второй преобразователь угол-код 45, второй привод 46, второй сумматор 46, четвертый сумматор 48, третий счетчик 49, пятый счетчик 50, пятый элемент И 51,. третий элемент И 52, второй дискриминатор 53.
Светоприемник 2, в качестве которого может быть применен фотометр, спектрофотометр и т. п., установлен на телескоп и воспринимает свет звезды, на которую наведен телескоп 1. По сигналу «1, поступающему с выхода логического блока 11 на вход светоприемника 2, последний начинает экспонирование звезды 80. По окончании экспонирования звезды на выходе светоприемника 2 формируется импульсный сигнал.
Логический блок 11 представляет собой цифровой двоичный элемент, в состав которого входят первый элемент И 74, третий и четвертый элементы ИЛИ 72 и 73. Логический блок 11 формирует функциональную зависимость вида
t/38Xt/39Xf/4o4-f/4b
гдеА - выходной сигнал логического блока 11;
t/38,t/39,L40,L4i -сигналы на входах 38, 39, 40 и 41 логического блока 11.
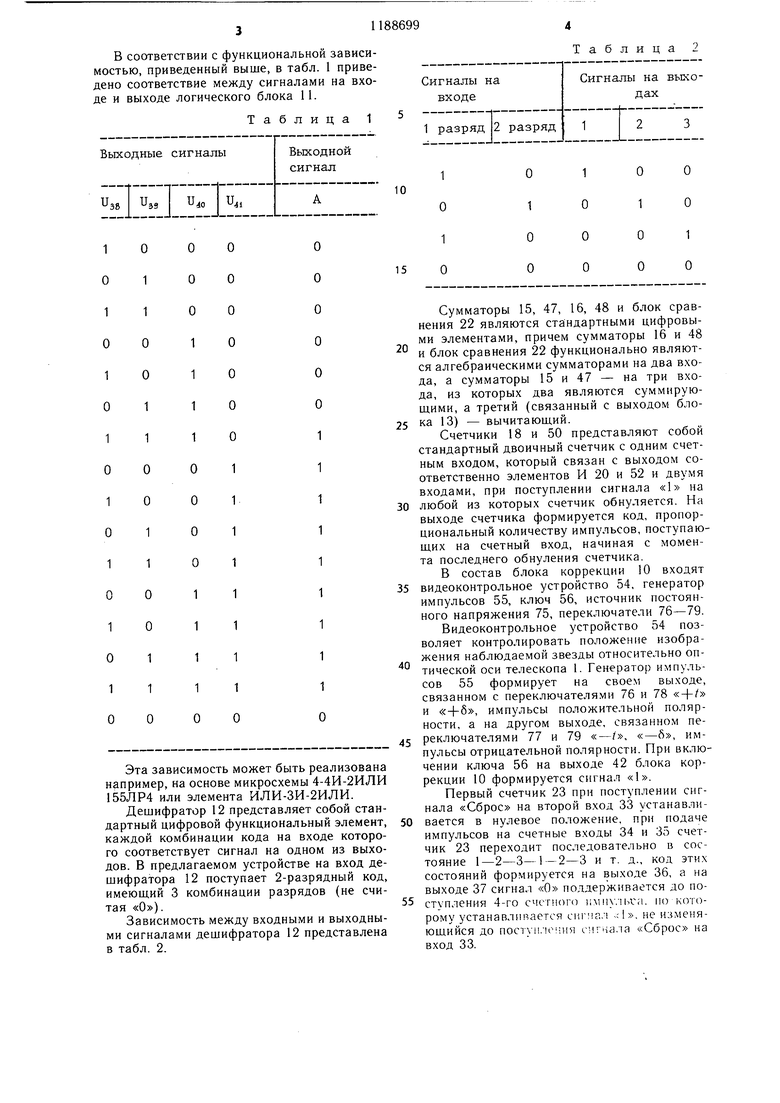
В соответствии с функциональной зависимостью, приведенный выше, в табл. 1 приведено соответствие между сигналами на входе и выходе логического блока 11.
Таблица 1
Эта зависимость может быть реализована например, на основе микросхемы 4-4И-2ИЛИ 155ЛР4 или элемента ИЛИ-ЗИ-2ИЛИ.
Дешифратор 12 представляет собой стандартный цифровой функциональный элемент, каждой комбинации кода на входе которого соответствует сигнал на одном из выходов. В предлагаемом устройстве на вход дешифратора 12 поступает 2-разрядный код, имеющий 3 комбинации разрядов (не считая «О).
Зависимость между входными и выходными сигналами дешифратора 12 представлена в табл. 2.
Таблица
Сумматоры 15, 47, 16, 48 и блок сравнения 22 являются стандартными цифровыми элементами, причем сумматоры 16 и 48 и блок сравнения 22 функционально являются алгебраическими сумматорами на два входа, а сумматоры 15 и 47 - на три входа, из которых два являются суммнруюшими, а третий (связанный с выходом бло5 ка 13) - вычитающий.
Счетчики 18 и 50 представляют собой стандартный двоичный счетчик с одним счетным входом, который связан с выходом соответственно элементов И 20 и 52 и двумя входами, при поступлении сигнала «1 на 0 любой из которых счетчик обнуляется. На выходе счетчика формируется код, пропорциональный количеству импульсов, поступающих на счетный вход, начиная с момента последнего обнуления счетчика.
В состав блока коррекции 10 входят 5 видеоконтрольное устройство 54, генератор импульсов 55, ключ 56, источник постоянного напряжения 75, переключатели 76-79.
Видеокоптрольное устройство 54 позволяет контролировать положение изображения наблюдаемой звезды относительно оптической оси телескопа 1. Генератор импульсов 55 формирует на своем выходе, связанном с переключателями 76 и 78 « + / и «+б, импульсы положительной полярности, а на другом выходе, связанном переключателями 77 и 79 «-/, «-6, импульсы отрицательной полярности. При включении ключа 56 на выходе 42 блока коррекции 10 формируется сигнал «1.
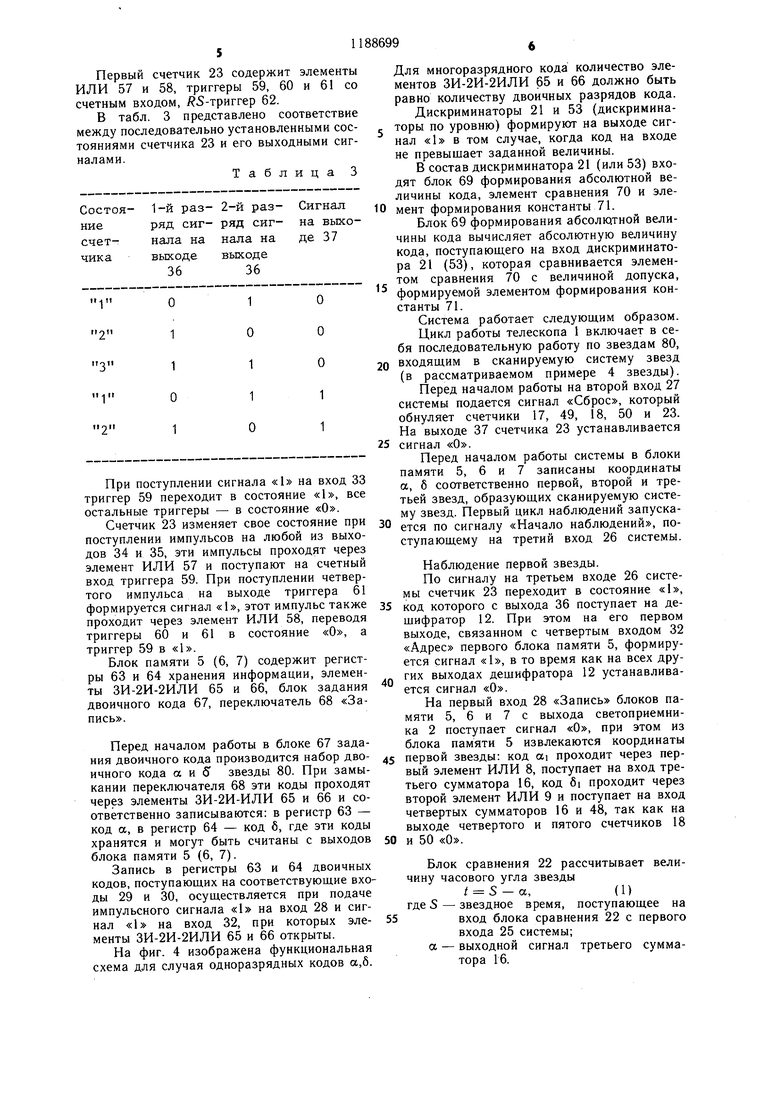
Первый счетчик 23 при поступлении сигнала «Сброс на второй вход 33 устанавли0вается в нулевое положение, при подаче импульсов на счетные входы 34 и 35 счетчик 23 переходит последовательно в состояние 1-2-3-Ь-2-3 и т. д., код этих состояний формируется на выходе 36, а на выходе 37 сигнал «О поддерживается до по5ступления 4-го счетного импч.пл;. по которому устанавливается cni-ia.i -d, не изменяющийся до nocTyii.-ioiuisi сигнала «Сброс на вход 33.
Первый счетчик 23 содержит элементы ИЛИ 57 и 58, триггеры 59, 60 и 61 со счетным входом, 5-триггер 62.
В табл. 3 представлено соответствие между последовательно установленными состояниями счетчика 23 и его выходными сигналами.
Таблица 3
При поступлении сигнала «1 на вход 33 триггер 59 переходит в состояние «1, все остальные триггеры - в состояние «О.
Счетчик 23 изменяет свое состояние при поступлении импульсов на любой из выходов 34 и 35, эти импульсы проходят через элемент ИЛИ 57 и поступают на счетный вход триггера 59. При поступлении четвертого импульса на выходе триггера 61 формируется сигнал «1, этот импульс также проходит через элемент ИЛИ 58, переводя триггеры 60 и 61 в состояние «О, а триггер 59 в «1.
Блок памяти 5 (6, 7) содержит регистры 63 и 64 хранения информации, элементы ЗИ-2И-2ИЛИ 65 и 66, блок задания двоичного кода 67, переключатель 68 «Запись.
Перед началом работы в блоке 67 задания двоичного кода производится набор двоичного кода а и 5 звезды 80. При замыкании переключателя 68 эти коды проходят через элементы ЗИ-2И-ИЛИ 65 и 66 и соответственно записываются: в регистр 63 - код а, в регистр 64 - код б, где эти коды хранятся и могут быть считаны с выходов блока памяти 5 (6, 7).
Запись в регистры 63 и 64 двоичных кодов, поступающих на соответствующие входы 29 и 30, осуществляется при подаче импульсного сигнала «1 на вход 28 и сигнал «1 на вход 32, при которых элементы ЗИ-2И-2ИЛИ 65 и 66 открыты.
На фиг. 4 изображена функциональная схема для случая одноразрядных кодов а,б.
Для многоразрядного кода количество элементов ЗИ-2И-2ИЛИ 65 и 66 должно быть равно количеству двоичных разрядов кода.
Дискриминаторы 21 и 53 (дискриминаторы по уровню) формируют на выходе сигнал «1 в том случае, когда код на входе не превышает заданной величины.
В состав дискриминатора 21 (или 53) входят блок 69 формирования абсолютной величины кода, элемент сравнения 70 и элемент формирования константы 71.
Блок 69 формирования абсолю.тной величины кода вычисляет абсолютную величину кода, поступающего на вход дискриминатора 21 (53), которая сравнивается элементом сравнения 70 с величиной допуска, формируемой элементом формирования константы 71.
Система работает следующим образом.
Цикл работы телескопа 1 включает в себя последовательную работу по звездам 80, входящим в сканируемую систему звезд (в рассматриваемом примере 4 звезды).
Перед началом работы на второй вход 27 системы подается сигнал «Сброс, который обнуляет счетчики 17, 49, 18, 50 и 23. На выходе 37 счетчика 23 устанавливается сигнал «О.
Перед началом работы системы в блоки памяти 5, 6 и 7 записаны координаты а, б соответственно первой, второй и третьей звезд, образующих сканируемую систему звезд. Первый цикл наблюдений запускается по сигналу «Начало наблюдений, поступающему на третий вход 26 системы.
Наблюдение первой звезды.
По сигналу на третьем входе 26 системы счетчик 23 переходит в состояние «1, код которого с выхода 36 поступает на дещифратор 12. При этом на его первом выходе, связанном с четвертым входом 32 «Адрес первого блока памяти 5, формируется сигнал «1, в то время как на всех других выходах дещифратора 12 устанавливается сигнал «О.
На первый вход 28 «Запись блоков памяти 5, 6 и 7 с выхода светоприемника 2 поступает сигнал «О, при этом из блока памяти 5 извлекаются координаты первой звезды: код «i проходит через первый элемент ИЛИ 8, поступает на вход третьего сумматора 16, код 6i проходит через второй элемент ИЛИ 9 и поступает на вход четвертых сумматоров 16 и 48, так как на выходе четвертого и пятого счетчиков 18 и 50 «О.
Блок сравнения 22 рассчитывает величину часового угла звезды
/ S -а,(1)
где S - звездное время, поступающее на вход блока сравнения 22 с первого входа 25 системы;
а - выходной сигнал третьего сумматора 16.
Первый привод 14 часовой оси телесно-, па 1 отрабатывает значения t, поступающие с выхода блока сравнения 22, путем управления по рассогласованию, рассчитываемому сумматором 15, между поступающими на его входы значениями и кодом фактического положения телескопа 1 по оси t, измеренным преобразователем угол-код 13. Аналогично второй привод 46 оси б телескопа 1 отрабатывает значения б звезды 80, поступающие с выхода сумматора 48. Наведение на звезду заканчивается, когда приводы 14 и 46 отработают заданное положение до значения рассогласования, не превыщающего заданной величины, контролируемой дискриминаторами 21 и 53, на выходе которых при этом формируется сигнал «1. Эти сигналы поступают на выходы 38 и 39 логического блока И, однако при этом на выходе его формируется сигнал «О, так как на входы 40 и 41 поступают сигналы «О.
Астроном наблюдает на видеоконтрольном устройстве 54 блока коррекции 10 изображение исследуемой звезды 80. Это изображение смещено относительно оптической оси телескопа 1 на величины ошибок наведения по осям t и б:
Д/(Да,р+А/ш;
,-р+Абт; где i - номер звезды, т. е. для первой
звезды .
Аа,р,Аб,р - погрешности величины координат звезды 80, обусловленные тем, что астроному точные координаты исследуемых звезд обычно не известны;
А/ш,Абш - инструментальные ошибки телескопа 1 в том его положении, которое он занимает в момент наведения на звезду 80 в первом цикле работы телескопа. Для приведения изображения исследуемой звезды 80 на оптическую ось телескопа 1 астроном отождествляет звезду и далее замыкает переключатели 76-79 полуавтоматической коррекции соответствующего знака. При этом по оси t коррекция положения осуществляется за счет того, что с выхода 43 блока коррекции 10 импульсы, формируемые генератором импульсов 55, проходят через элемент И 20, открытый сигналом «О, сформированным на выходе 42, и считываются счетчикой 18. Код счетчика 18 поступает на суммирующий вход сумматора 16, выходной код которого отрабатывается как это указано выше приводом 14. Коррекция положения прекращается, когда положение телескопа 1 будет скорректировано на величину . При этом код, пропорциональный этой величине, будет сформирован в счетчике 18. Коррекция телескопа 1 по оси б по сигналам с выхода 44 блока коррекции 10 происходит в результате аналогичной работы
блока управления 4. После приведения изображения звезды 80 на оптическую ось телескопа 1 астроном включает ключ 56. При этом на выходе 42 блока коррекции 10 формируется сигнал «1, который, поступая на вход 41 логического блока 11, формирует на его выходе сигнал «1. По этому сигналу светоприемник 2 начинает экспонирование звезды 80. За время экстозиции в результате перемещения телескопа 1 инструментальные погрешности телескопа Доказывающие влияние на наблюдение, изменяются так, что к концу экспозиции это изменение равно по осям i и б соответственно Wi аИ.б1 „.Это приводит к смещению изображения звезды 80 с оптической оси телескопа 1, которую астроном компенсирует путем непрерывной коррекции во время экспозиции положения телескопа 1 на эти величины. Такая коррекция по оси осуществляется за счет манипуляций переключателяQ ми 76-79 блока коррекции 10. При этом импульсы с выхода 43 проходят в блок управления 3 через открытый по сигналу «1 на выходе 42 элемент И 19 и подсчитываются в счетчике 17. Код счетчика 17 поступает на суммирующий вход сумматора 15
5 и отрабатывается приводом 14. Таким образом к концу экспозиции в счетчике 17 будет сформирован код, пропорциональный . Аналогично по оси б работает блок уп(2) равления 4, и в счетчике 49 формируется X6iu.
0
По окончании экспозиции на выходе светоприемника 2 формируется импульс, который поступает на входы 28 блоков памяти 5, 6 и 7. При этом в тот из них, на вход 32 которого подается сигнал «Ад5 рее (в рассматриваемом случае это блок 5), записываются и далее хранятся поступающие с выходов сумматоров 16 и 48 уточненные координаты звезды 80.
fiiy Mi + а,-, . ч .. Дб,- + бь /
где L - номер звезды.
Импульс, поступающий с выхода светоприемника 2, задерживается на величину длительности импульса блока задержки 24, после чего он поступает на вход 35 счетчика 23,
5 переводя его в состояние «2, и на вход счетчиков 18 и 50, обнуляя их. С этого момента времени телескоп 1 переходит к наблюдению второй звезды 80.
Наблюдение второй и третьей звезд. Работа системы управления при наблюдении второй и третьей звезд аналогична работе при наблюдении первой звезды 80. Дещифратора 12 по коду «2, поступающему на его вход, формирует сигнал, извлекающий координаты второй звезды as, сУа из блока памяти 6, а по коду «3 - координаты треть5 ей звезды аз. &з из блока памяти 7.
При / 2, 3 в счетчиках 17 и 49, алгоритмы работы которых описываются форму.лами (2) и (3), к моменту окончания экспозиции каждой звезды накопится суммарная величина изменения инструментальных ошибок за время экснозиции, начиная с начала сеанса наблюдений. По окончании наблюдения уточненные координаты 2-й и 3-й звезд хранятся соответственно в блоках памяти 6 и 7.
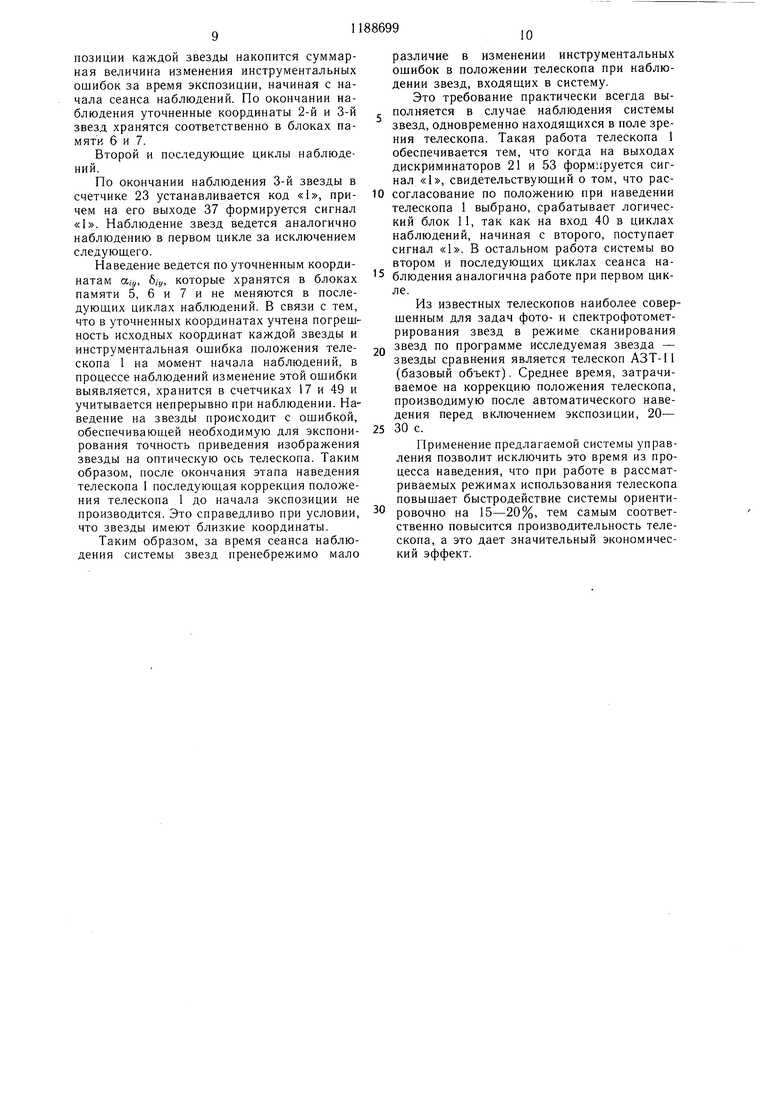
Второй и последующие циклы наблюдений.
По окончании наблюдения 3-й звезды в счетчике 23 устанавливается код «1, причем на его выходе 37 формируется сигнал «1. Наблюдение звезд ведется аналогично наблюдению в первом цикле за исключением следующего.
Наведение ведется по уточненным координатам а.1у, diy, которые хранятся в блоках памяти 5, 6 и 7 и не меняются в последующих циклах наблюдений. В связи с тем, что в уточненных координатах учтена погрешность исходных координат каждой звезды и инструментальная ощибка положения телескопа 1 на момент начала наблюдений, в процессе наблюдений изменение этой ошибки выявляется, хранится в счетчиках 17 и 49 и учитывается непрерывно при наблюдении. Наведение на звезды происходит с ощибкой, обеспечивающей необходимую для экспонирования точность приведения изображения звезды на оптическую ось телескопа. Таким образом, после окончания этапа наведения телескопа 1 последующая коррекция положения телескопа 1 до начала экспозиции не производится. Это справедливо при условии, что звезды имеют близкие координаты.
Таким образом, за время сеанса наблюдения системы звезд пренебрежимо мало
различие в изменении инструментальных ошибок в положении телескопа при наблюдении звезд, входящих в систему.
Это требование практически всегда выполняется в случае наблюдения системы звезд, одновременно находящихся в ноле зрения телескопа. Такая работа телескопа 1 обеспечивается тем, что когда на выходах дискриминаторов 21 и 53 формируется сигнал «1, свидетельствующий о том, что рассогласование по положению при наведении телескопа 1 выбрано, срабатывает логический блок 11, так как на вход 40 в циклах наблюдений, начиная с второго, поступает сигнал «1. Б остальном работа системы во втором и последующих циклах сеанса наблюдения аналогична работе при первом цикле.
Из известных телескопов наиболее соверщенным для задач фото- и спектрофотометрирования звезд в режиме сканирования
звезд по программе исследуемая звезда - звезды сравнения является телескоп АЗТ-П (базовый объект). Среднее время, затрачиваемое на коррекцию положения телескопа, производимую после автоматического наведения перед включением экспозиции, 20-
30 с.
Применение предлагаемой системы управления позволит исключить это время из процесса наведения, что при работе в рассматриваемых режимах использования телескопа повыщает быстродействие системы ориентировочно на 15-20%, тем самым соответственно повысится производительность телескопа, а это дает значительный экономический эффект.
От 80
56
75
76
55 J9j
2 -О
«5 -О
4 -О
Риг. 2 i- i/i разряд 5759 orUО-
sL Г
58
Pu8. 3
О 3d 2 и разряд 6162 rt
| Устройство для полуавтоматической коррекции положения азимутального телескопа | 1973 |
|
SU481022A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
