фие2
Изобретение относится к машиностроению, в частности к модулям линейного перемещения роботов и манипуляторов.
Целью изобретения является улучшение динамических характеристик модуля. Эта цель достигается тем, что эксцентриковая ось одного из трех катков каждой обоймы, имеющая возможность свободного вращения в корпусе, выполнена полой и в ее внутренней полости расположен торсионный вал, один конец которого сопряжен с осью, а другой конец нагружен крутящим моментом и его положение зафиксировано относительно корпуса, причем вал расположен соосно опорным поверхностям оси, а остальные катки обоймы расположены на осях без эксцентриситета.
Новым в предлагаемой конструкции является выполнение эксцентриковой оси полой, расположение в ее внутренней полости торсионного вала, один конец которого сопряжен с осью, а другой конец нагружен крутящим моментом и его положение зафиксировано относительно корпуса, расположение вала соосно опорным поверхностям оси, расположение двух других катков обоймы ма осях эксцентриситета, что соответствует критерию существенные отличия.
Техническими преимуществами заявляемой конструкции по сравнению с прототипами, является простота конструкции, возможность увеличения быстродействия за счет уменьшения динамических процессов при износе пары рука - каток, отсутствие необходимости регулировки силы прижатия катков В руке в процессе эксплуатации робота.
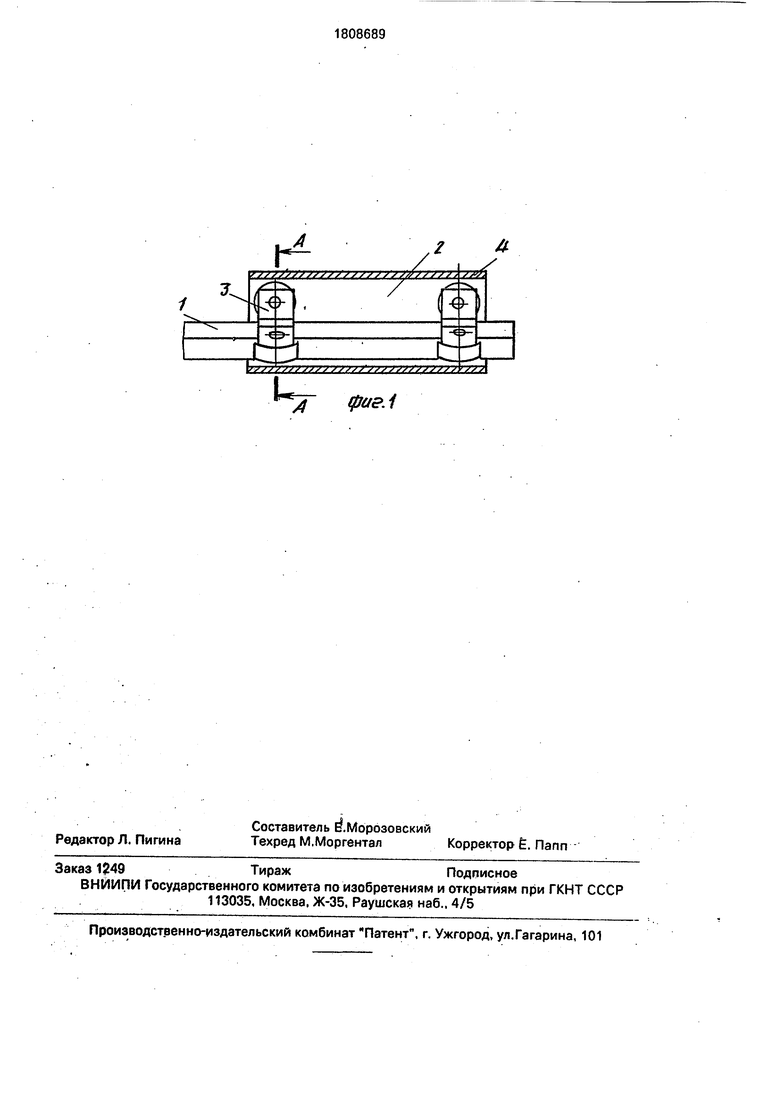
Конструкция модуля представлена на фиг.1. На фиг.2 показан разрез А-А на фиг.1, демонстрирующий конструкцию обоймы и эксцентрикового хагка. Модуль линейных перемещений (фиг. 1) состоит из руки 1, имеющей возможность перемещения относительно неподвижной части 2 модуля, которая крепится к промышленному роботу. Неподвижная часть 2 модуля представляет со.бой две обоймы 3 с катками, соединенные между собой кожухом 4.
На фиг.2 показано поперечное сечение обоймы 3. Обойма состоит из двух опорных катков 5, установленных при помощи подшипников 6 на осях, закрепленных в обойме 3 при помощи тангенциальных зажимов 8, а также прижимного катка 9, установленного в обойме 3 на эксцентриковой оси 10, свободно вращающейся в обойме, при помощи подшипников 11. Опорные части 12 оси расположены с эксцентриситетом еотносительно центральной части 13 оси, несущей каток 9. Ось 10 выполнена полой и в ее внутренней полости расположен торсионный вал 14, сопряженный с опорной частью 10 оси шлицевым либо профильным соединением. Фланцевая часть 1-5 торсионного вала повернута относительно сопряженного с осью 10 конца на угол р и зафиксирована в этом положении относительно обоймы 3 болтами 16.
Поворот на угол р фланцевой части торсионного вала осуществляется после сборки обойм и установки в них руки путем приложения к фланцу 15 крутящего момента Мкр. При этом прижимной каток 9 воздействует
на руку силой F. При эксплуатации модуля будет происходить износ катков и рабочих поверхностей руки, что приводит к образованию зазоров между ними и ухудшит паспортные характеристики. Однако бла
годаря наличию крутящего момента на валу торсиона, созданного при сборке, передающегося на эксцентриковую ось и разворачивающую ее относительно обоймы с прижатием прижимного катка в руке, зазоры выбираются. Величина первоначального угла закручивания р выбирается таким образом, чтобы была гарантирована компенсация износа катков и руки на протяжении расчетного срока эксплуатации.
Формул а изобретени я Модуль линейного перемещения промышленного робота, содержащий руку, обоймы с катками, по меньшей мере один из
которых расположен на эксцентриковой оси. имеющей опорные поверхности, сопряженные с опорными поверхностями обоймы, отличающийся тем, что, с целью улучшения динамических характеристик,
эксцентриковые оси обойм имеют возможность свободного вращения и выполнены полыми, при этом в полости эксцентриковой оси расположен дополнительно введенный торсионный вал, один конец которого сопряжен с осью, а другой конец закручен и зафиксирован относительно обоймы, причем геометрическая ось торсионного вала совпадает с геометрической осью опорной поверхности эксцентриковой оси.
Чг
фаг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовая часть гусеничного транспортного средства | 1987 |
|
SU1504145A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 1991 |
|
RU2023117C1 |
| Эксцентриковый механизм подъема-опускания подвижной рамы шагающего конвейера | 1990 |
|
SU1795953A3 |
| УСТРОЙСТВО ДЛЯ РАСКАТКИ СКВАЖИН В ГРУНТЕ | 1997 |
|
RU2121546C1 |
| ПРОХОДЧЕСКИЙ РОБОТ | 1989 |
|
SU1637394A1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2365726C1 |
| Вертикальный механический пресс | 1988 |
|
SU1636250A1 |
| Подвеска гусеничного транспортного средства | 1978 |
|
SU740589A1 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ГРАЖДАНСКОГО НАЗНАЧЕНИЯ | 2017 |
|
RU2681821C2 |
Изобретение относится к машиностроению, в частности к модулям линейного перемещения роботов и манипуляторов. Эксцентриковая ось 10 одного из трех катков каждой обоймы 3 имеет возможность свободного вращения в корпусе 4, выполнена полой, а в ее внутренней полости расположен торсионный вал 14, один конец которого сопряжен с осью 10, а другой нагружен крутящим моментом и его положение зафиксировано относительно корпуса. Остальные катки 5 обоймы расположены на осях без эксцентриситета. 2 ил.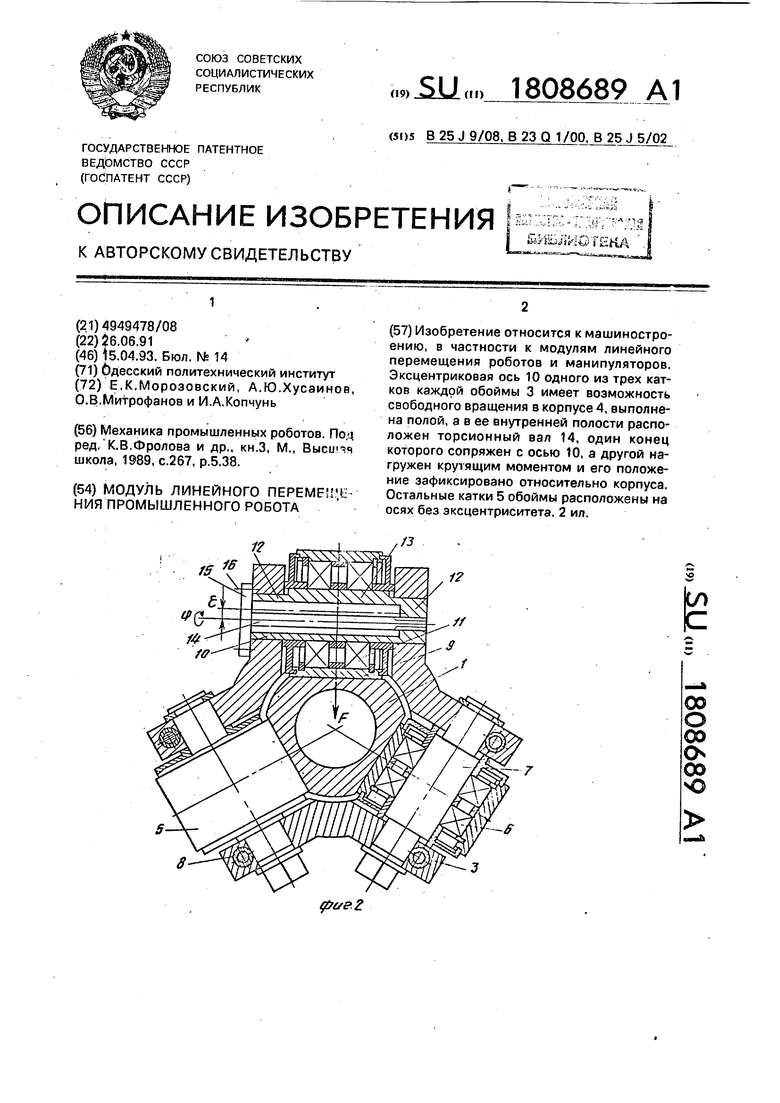
| Механика промышленных роботов | |||
| Под ред.К.В.Фролова и др., кн.З, М., Высшая школа, 1989, с.267, р.5.38. |
