Изобретение относится к приводам строительных и дорожных машин и может быть использовано, в частности для машин по обслуживанию и ремонту дорожных покрытий.
Целью изобретения является расширение функциональных возможностей гидропривода путем обеспечения плавающего положения рабочего органа при одновременном уравновешивании его веса.
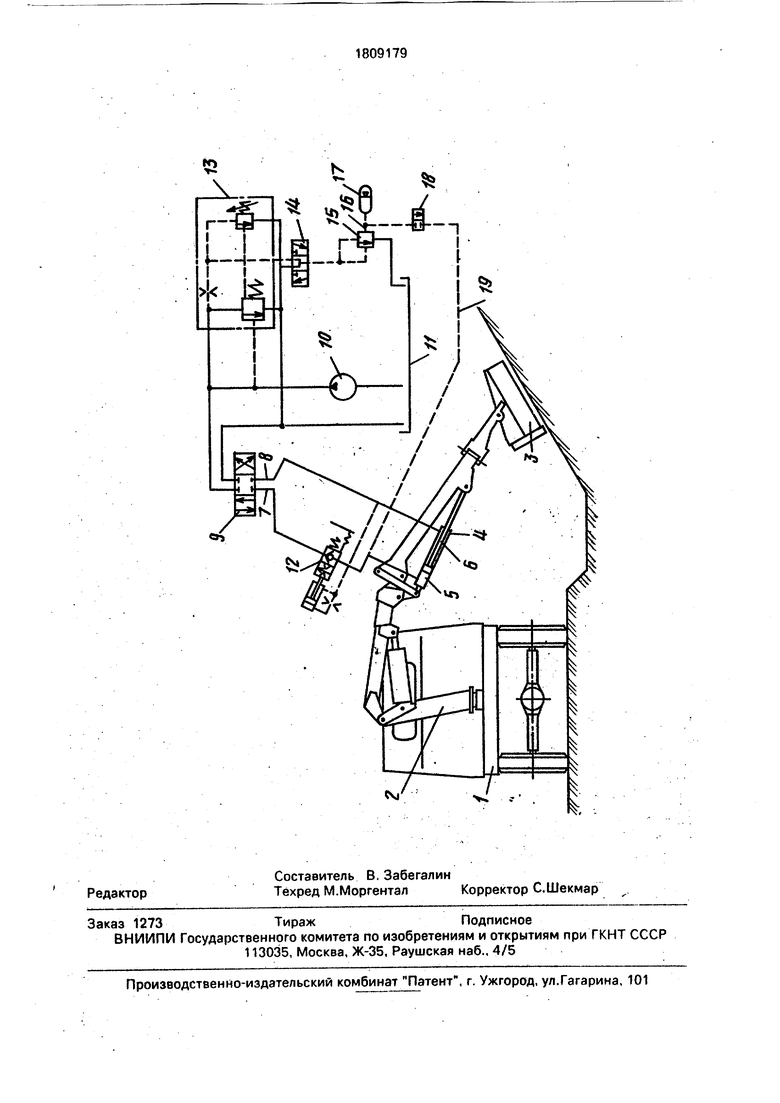
На чертеже представлен гидропривод рабочего оборудования дорожной машины.
Гидропривод рабочего оборудования дорожной машины содержит соединенный с рамой 1 манипулятор 2 с рабочим органом. 3 (напримерг щетка, косилка).
Привод манипулятора осуществляется от гидроцилиндров, в частности привод рабочего органа 3 манипулятора осуществляется от гидроцилиндра 4, подъема и опускания полости которого 5 и 6 соединены с рабочими отводами 7 и 8 первого трехпози- ционного гидрораспределителя 9, подключенного к гидронасосу 1.0 и к гидробаку 11, причем полость 5 гидроцилиндра 4 сообщена с рабочим отводом 7 гидрораспределителя 9 через гидрозамок 12 со встроенным в него тормозным клапаном.
Рабочее оборудование кроме того снабжено предохранительно-разгрузочным клапаном 131/вход которого параллельно соединен с насосом 10 и гидрораспределителем 9, а выход с гидробаком 11.
Кроме того к задроссельной полости предохранительно-разгрузочного клапана 13 подсоединен один из входов второго трехпо00
о ю
4
чэ
зиционного трехлинейного гидрораспредё- лителя И/к рабочему отводу которого подсоединен клапан давления 15 с двумя полостями управления вторая полость 16 которого, противоположная первой полости управления, соединена с гидропневмоакку- мулятором 17 и через управляемый нормально-закрытый клапан 18 гидролинией 19 с полостью 5 гидроцилиндра 4.
Предлагаемое гидрооборудование дорожной машины может работать в режимах: разгрузки, рабочем и предохранительном.
Режим разгрузки достигается нейтральной позицией второго гидрораспределителя 14, которая обеспечив ает связь задрос- сельного пространства клапана 13 с гидробаком 11.
Указанная связь обеспечивает слив потока насоса 10 в гидробак 11 через затвор второй ступени клапана 13 с минимальным перепадом, обусловленного позиционной пружиной клапана 13.
Рабочий режим достигается переводом гидрораспределителей 14 и 9 в любую рабочую позицию.
В результате отключения задроссель- ной полости клапана 13 от гидробака 11, затвор второй ступени клапана 13 закроется под действием позиционной пружины и из- за отсутствия перепада давления на дроссели клапана 13.
В итоге поток от насоса 10 начнет поступать к потребителю.
Предохранительный режим наступает в том случае, когда давление в гидросистеме достигает уровня, который будет создавать усилие, действующее на затвор первой ступени клапана 13с силой большей усилия его пружины, а также и в случае когда оно превысит усилие, развиваемое гидропневмоак- кумулятором 17 на полость 16 клапана 15.
Усилие, развиваемое гидропневмоакку- мулятором 17 на затвор клапана 15 зависит от уровня давления зарядки газовой полости.
Предварительная зарядка газовой полости гидропневмоаккумулятора 17 производится до давления, которое возникает в полости 5 гидроцилиндра 4 от сил веса элементов конструкции рабочего органа.
Таким образом в предохранительном режиме после открытия одного из клапанов на дросселе возникает перепад давления, который откроет затвор второй ступени клапана 13, чем будет обеспечен проход потока от насоса 10 на слив в гидробак 11с возможным максимальным перепадом давления.
1. Работа оборудования при выполнении операции Подъем. Для выполнения операции гидрораспределители 9 и 17 из
нейтральной позиции переводятся в левую позицию.
В результате этого насос 10 переходит из режима разгрузки в рабочий режим с ограничением уровня давления в гидросистеме на уровне, определяемом усилием регулировочной пружины клапана 13 и направлением потока насоса 10 через рабочую позицию, гидрораспределителя 9 и об- ратный клапан гидрозамка 12 в полость 5 гидроцилиндра 4.
Под действием возникшего перепада давления на поршне, шток гидроцилиндра 4 начнёт выдвигаться. Происходит подъем ра- бочего органа 3.
Операция прекращается после установки гидрораспределителей 9 и 14 в нейтральную позицию.
2. Работа оборудования при выполнении операции Опускание. Операция может выполняться в двух режимах - принудительный, с потреблением энергии от насоса 10 и без потребления энергии внешнего источника, т.е. под действием сиды веса конструкции.
При выполнении операции Опускание гидрораспределитель 9 устанавливается в первую позицию, а гидрораспределитель 14 в левую позицию. В результате поток от
насоса 10 будет поступать через гидрорасп- ределитель 9 в полость гидроцилиндра 4. Давлением, которое возникает в полости б, гидрозамок 12 вскрывается и поток из полости 5 начинает вытесняться через дроссель
гидрозамка 12 на слив в гидробак 11.
Операция прекращается переводом гидрораспределителей 9 и 14 в нейтральную позицию.
Операция Опускание под действием
силы веса производится установкой гидрораспределителя 9 в правую позицию и принудительным открытием гидрозамка 12 от внешнего усилия.
3. Работа оборудования при выполне
нии операции снятия весовой нагрузки конструкции на обслуживаемую поверхность.
Операция производится в следующей последовательности: рабочий орган ориентируется в пространстве в требуемом поло0 жении и фиксируется в этом положении с некоторым зазором над обслуживаемой поверхностью. После этого клапан 18 переводится в открытое положение и полость 5 соединяется с полостью 16 и гидропневмо5 аккумулятором 17.
Под воздействием давления в полости 5, созданного весом конструкции, гидропнев- моаккумулятор 17 зарядится до указанного уровня давления и таким образом клапан 15 будет настроен на давление, определенное
моментом силы веса конструкции в заданном положении рабочего органа 3.
Затем происходит установка гидрораспределителя 14 в левую позицию, чем обеспечивается соединение задроссельной полости клапана 13 с входом клапана 13 с входом клапана 15 и в результате насос 10 переводится из режима разгрузки в рабочий режим с максимальным возможным давлением потока, определяемого давлением зарядки гидропневмоаккумулятора 17.
После установки гидрораспреДл делите- ля 9 в левую позицию поток насоса 10 будет поступать в полость 5 гидроцилиндра 4. Так как давление, развиваемое насосом 10, и давление в полости 5, определяемое весом конструкции, равны, то рабочий орган 3 свое- . го положения не измени/. Затем, принудительно открывают гидрозамок 12. Если теперь к рабочему органу 3 приложить внешнюю силу (например, при наличии препятствия), то под действием ее состэвляюще действующей в вертикальной плоскости, рабочий орган 3 бу- дб изменять свое положение в пространстве, причем этой силе не придется преодолевать полностью силу веса конструкции при подъеме органа 3, т.к. вес конструкции уравновешен силой давления потока насоса 10.
Если эта силу будет снята, то рабочий орган 3 автоматически возвратится в исходное положение, т.к. исходное положение рабочего органа соответствует устойчивому равновесию системы.
Например, если внешней силой рабочий орган 3 будет поднят, то после снятия этой силы, чтобы органу остаться в этом положении в полости 5 должно быть больше давление, т.к. оно должно в этом новом положении уравновесить больший момент сил, который возрос из-за увеличения плеча, на котором приложена сила веса. Но так как давление, развиваемое потоком насоса 10, остается постоянным, на уровне, который определяется моментом от сил веса конструкции, который соответствует заданному положению рабочего органа 3.
Таким образом после снятия внешней силы рабочий орган вернется в исходное положение,
- Аналогично будет протекать процесс, если внешняя сила будет направлена вниз.
При обслуживании какой-либо дорожной поверхности щеткой или косилкой такой внешней силой будут являться всякая неровность, которая будет пытаться поднять 5 рабочий орган.
Как отмечалось раньше, усилие, которое потребуется для смещения рабочего органа вверх, не будет преодолевать полностью веса конструкции, что приведет к снижению
0 сил трения между рабочим органом и обслуживаемой поверхностью, а тем самым к снижению боковых нагрузок на конструкцию манипулятора. . Формула изобретения
5Гидропривод рабочего оборудования дорожной машины, содержащий гидроцилиндр подъема и опускания рабочего органа, полости которого сообщены через первый трехпозиционный распределитель с насосом
0 и баком, гидрозамок, установленный в гидролинии сообщения полости подъема гидроцилиндра с первым трехпозиционным распределителем, второй трехпозиционный распределитель, клапан давления и предо5 хранительно-разгрузочный кллпан, через который насос сообщен с баком, отличающийся тем, что, с целью расширения функциональных возможностей гидропривода путем обеспечения плавающего поло0 жения рабочего органа при одновременном уравновешивании его веса, он снабжен пнев- могидроаккумулятором и управляемым норма ль но закрытым клапаном, клапан давления выполнен с двумя полостями уп5 равления, второй трехпозиционный распределитель выполнен трехлинейным, а предохранительный клапан выполнен двухступенчатым и его задроссельная полость подключена к одному из входов второго
0 трехпозиционного распределителя, второй вход которого сообщен с баком, а выход - с входом и с одной из полостей управления клапана давления, выход которого сообщен с баком, причем другая полость управления
5 клапана давления подключена к гидропнев- моаккумулятору, который через управляемый нормально закрытый клапан сообщен с полостью подъема гидроцилиндра, при этом второй трехпозиционный распределитель
0 выполнен в одной из позиций с возможностью соединения между собой всех его трех линий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод рабочего оборудования дорожной машины | 1989 |
|
SU1758178A1 |
| Гидропривод рабочего оборудования дорожной машины | 1988 |
|
SU1666665A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО КАНТОВАТЕЛЯ С ПОВОРОТНОЙ ПОДЪЕМНОЙ ПЛАТФОРМОЙ | 2008 |
|
RU2356829C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидравлический привод лебедки | 1990 |
|
SU1763350A1 |
| Гидравлический привод автомобильного подъемника | 1991 |
|
SU1789787A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ | 2014 |
|
RU2553620C1 |
| Гидропривод грузовой лебедки стрелового крана | 1984 |
|
SU1294760A1 |
Сущность изобретения: полости гидроцилиндра подъема и опускания рабочегоорга- на сообщены через первый трехпозиционный распределитель с насосом и баком. Гидрозамок установлен в гидролинии сообщения полости подъема с первым трехпозиционным распределителем. Через предохранительно-разгрузочный клапан насос сообщен с баком. Клапан давления выполнен с двумя полостями управления. Второй трехпозиционный распределитель выполнен трехлинейным, предохранительный клапан-двухступенчатым, и его задроссельная полость подключена к одному из входов второго распределителя, второй вход которого сообщен с баком, выход - с входом и с одной из полостей управления клапана давления, выход которого сообщен с баком. Другая полость управления клапана давления подключена к гидропневмоаккуму- лятору, который через управляемый нормально закрытый клапан сообщен с полостью подъема. Второй распределитель выполнен в одной из позиций с возможностью соединения между собой всех трех линий. 1 ил. СО
| Гидропривод рабочего оборудования дорожной машины | 1988 |
|
SU1666665A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
