Изобретение относится к измерению параметров углового движения в инерци- альном пространстве.
Целью изобретения является повышение точности выходных значений трех взаимно ортогональных проекций измеряемого произвольно направленного векторного параметра при использовании любой пары чувствительных элементов.
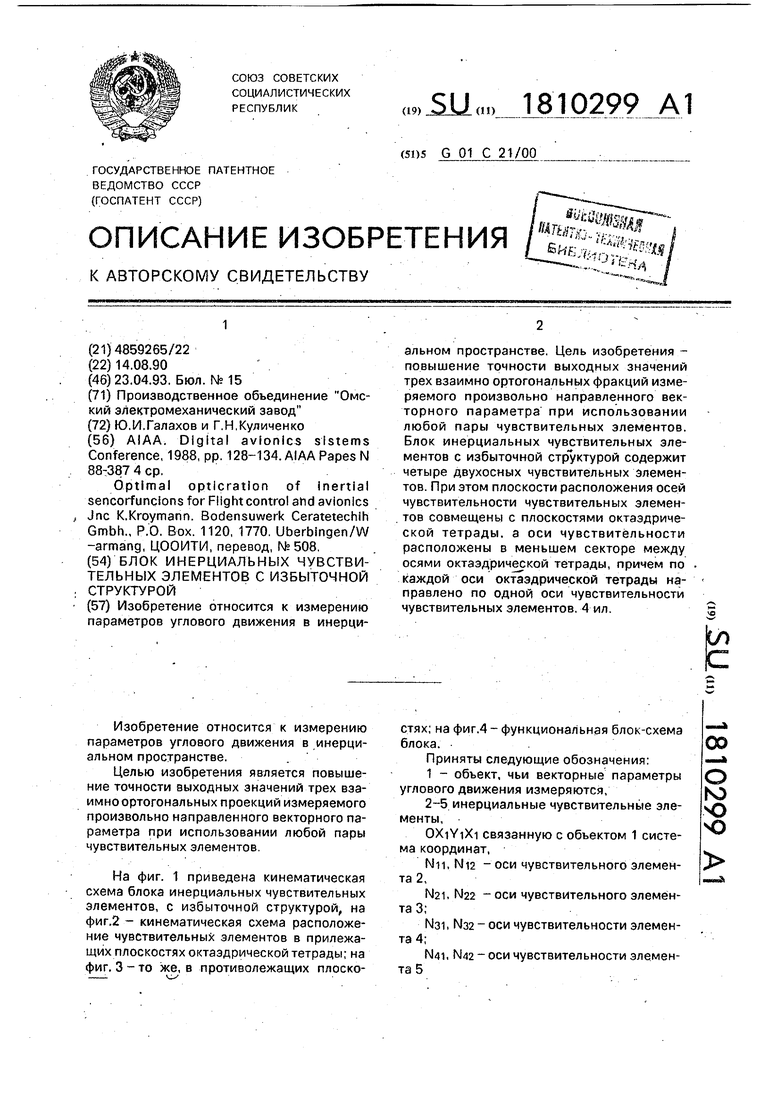
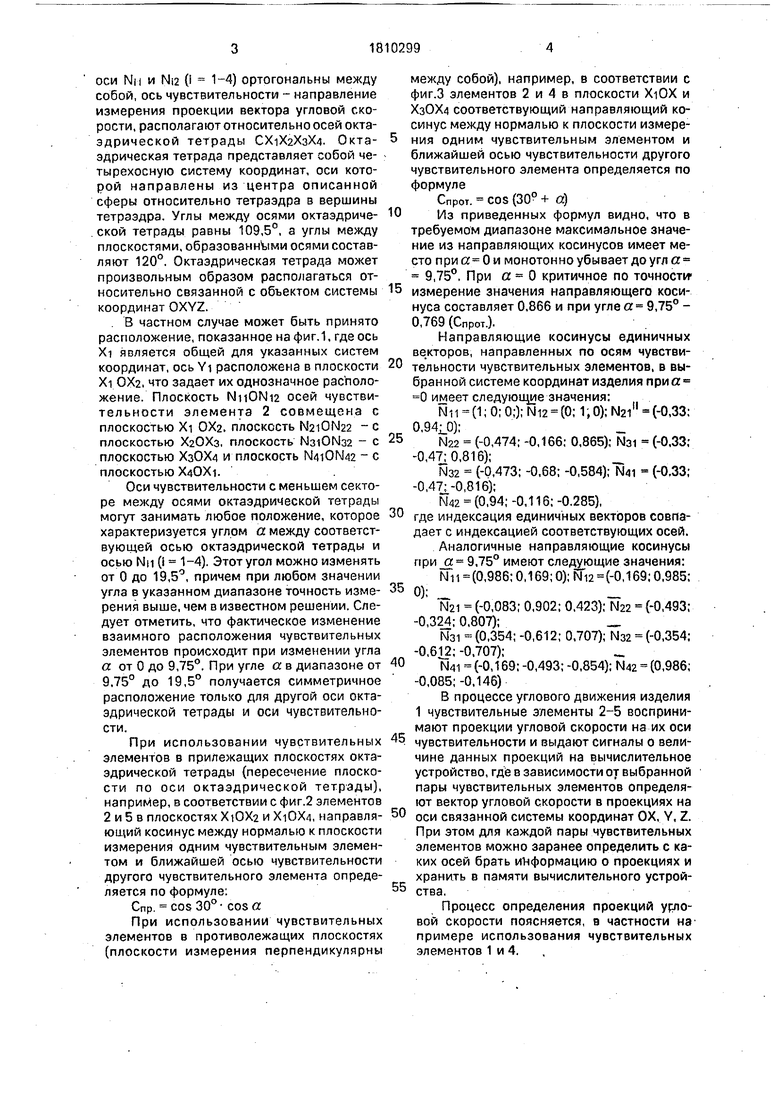
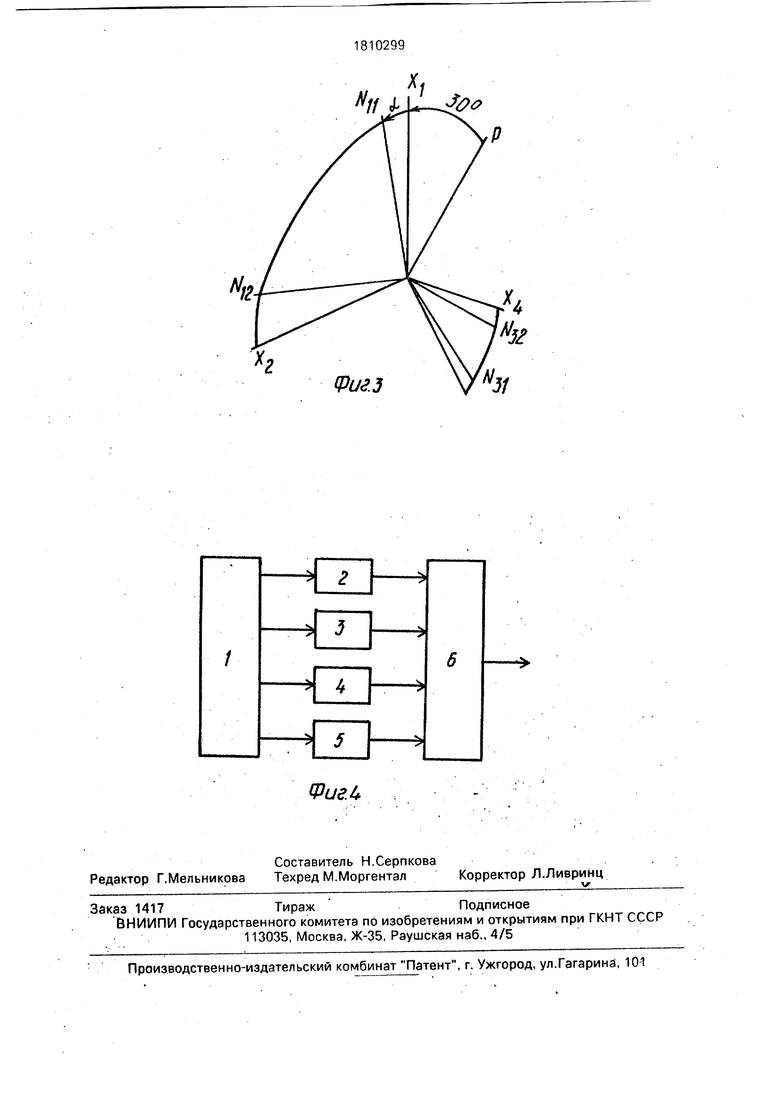
На фиг. 1 приведена кинематическая схема блока инерциальных чувствительных элементов, с избыточной структурой, на фиг.2 - кинематическая схема расположение чувствительных элементов в прилежащих плоскостях октаэдрической тетрады; на фиг. 3 - то же, в противолежащих плоскостях; на фиг.4 - функциональная блок-схема блока.
Приняты следующие обозначения:
1 - объект, чьи векторные параметры углового движения измеряются,
2-5 инерциальные чувствительные элементы,
OXiYiXi связанную с объектом 1 система координат,
NH, N12 - оси чувствительного элемента 2,
N21, N22 - оси чувствительного элемента 3;
N31, N32 - оси чувствительности элемента 4;
N41, N42 - оси чувствительности элемента 5
00
о
ю
Ч)
ю
оси NH и N12 (i 1-4) ортогональны между собой, ось чувствительности - направление измерения проекции вектора угловой скорости, располагают относительно осей окта- эдрической тетрады 0X1X2X3X4. Окта- эдрическая тетрада представляет собой четырехосную систему координат, оси которой направлены из центра описанной сферы относительно тетраэдра в вершины тетраэдра. Углы между осями октаэдриче- . ской тетрады равны 109,5°, а углы между плоскостями, образованными осями составляют 120°. Октаэдрическая тетрада может произвольным образом располагаться относительно связанной с объектом системы координат OXYZ.
. В частном случае может быть принято расположение, показанное нафиг.1. где ось Xi является общей для указанных систем координат, ось YI расположена в плоскости Xi 0X2, что задает их однозначное расположение. Плоскость NnONi2 осей чувствительности элемента 2 совмещена с
ПЛОСКОСТЬЮ Xi 0X2. ПЛОСКОСТЬ N210N22 - С
плоскостью Х20Хз, плоскость NaiONaa - с
ПЛОСКОСТЬЮ ХзОХ4 И ПЛОСКОСТЬ N410N42 - С ПЛОСКОСТЬЮ Х40Х1..
Оси чувствительности с меньшем секторе между осями октаэдрической тетрады могут занимать любое положение, которое характеризуется углом а между соответствующей осью октаэдрической тетрады и осью Nn (i 1-4). Этот угол можно изменять от 0 до 19,5°, причем при любом значении угла в указанном диапазоне точность измерения выше, чем в известном решении. Следует отметить, что фактическое изменение взаимного расположения чувствительных элементов происходит при изменении угла а от 0 до 9,75°. При угле а в диапазоне от 9.75° до 19,5° получается симметричное расположение только для другой оси октаэдрической тетрады и оси чувствительности.
При использовании чувствительных элементов в прилежащих плоскостях октаэдрической тетрады (пересечение плоскости по оси октаэдрической тетрады), например, в соответствии с фиг.2 элементов 2 и 5 в плоскостях XiOX2 и XiOX4, направляющий косинус между нормалью к плоскости измерения одним чувствительным элементом и ближайшей осью чувствительности другого чувствительного элемента определяется по формуле:
СПр. cos30°- cos a
При использовании чувствительных элементов в противолежащих плоскостях (плоскости измерения перпендикулярны
0
5
0
5
0
5
0
5
0
5
между собой), например, в соответствии с фиг.З элементов 2 и 4 в плоскости XiOX и ХзОХ4 соответствующий направляющий косинус между нормалью к плоскости измерения одним чувствительным элементом и ближайшей осью чувствительности другого чувствительного элемента определяется по формуле
Спрот. cos (309 + а)
Из приведенных формул видно, что в требуемом диапазоне максимальное значение из направляющих косинусов имеет место монотонно убывает до угл а 9,75°, При а - 0 критичное по точности измерение значения направляющего косинуса составляет 0,866 и при угле а 9,75° - 0,769 (Спрот.).
Направляющие косинусы единичных векторов, направленных по осям чувствительности чувствительных элементов, в выбранной системе координат изделия приа 0 имеет следующее значения:
Nn (1; 0; 0;); Ni2 (0; 1,0); N21 (-0,33: 0.941.0):
N22 (-0,474; -0,166; 0,865); N31 (-0,33;
-0,47:0,816);
N32 (-0,473; -0,68; -0,584); N41 - (-0.33;
-0,47;-0,816);
N« (0,94;-0,116;-0.285), где индексация единичных векторов совпадает с индексацией соответствующих осей.
Аналогичные направляющие косинусы при а 9,75° имеют следующие значения:
Nn (0,986; 0,169; 0);Ni2 (-0,169; 0,985;
0):
N21 (-0,083; 0,902; 0.423); N22 (-0,493;
-0,324; 0,807);„
N31 (0,354; -0,612; 0,707); N32 (-0,354;
-0,612;-0.707);
N41 (-0,169; -0,493; -0,854); N42 (0,986;
-0,085;-0,146)
В процессе углового движения изделия 1 чувствительные элементы 2-5 воспринимают проекции угловой скорости на их оси чувствительности и выдают сигналы о величине данных проекций на вычислительное устройство, где в зависимости от выбранной пары чувствительных элементов определяют вектор угловой скорости в проекциях на оси связанной системы координат OX, Y, Z. При этом для каждой пары чувствительных элементов можно заранее определить с каких осей брать информацию о проекциях и хранить в памяти вычислительного устройства.
Процесс определения проекций ужовой скорости поясняется, в частности на примере использования чувствительных элементов 1 и 4.
Выбирают вариант расчета, в котором используют информацию по обеим осям чувствительности элемента 1 (Nn и N12) и по оси (N41) элемента 2, имеющей максимальный направляющий косинус с плоскостью NiiONiz осей чувствительности элемента 1.
По направляющим косинусам осей чувствительности N и и N12 в связанной системе координат на основе векторного произведения направляющие косинусы единичного вектора, направленного по нормали к плоскости NjiONjg, по формуле
. .Ni NH N12 Определяют направляющий косинус между нормалью Ni и осью N41 на основе скалярного произведения подформуле
а Ni N41
и одновременно находят тангенс угла между указанными осями по формуле
tg а
Определяют синус и косинус Угла у между осью Nn и проекцией оси N41 на плоскость NnONi2 на основе векторного произведения, нормировки вектора и скалярных произведений по формулам
- X NixN4; хп -г|г .
cosy Nn N12; slny Xn N11 Указанные выше вычисления не зависят от величины вектора угловой скорости и конечные величины могут быть вычислены предварительно для каждой пары чувствительных элементов и храниться в памяти вычислительного устройства.
Далее на основе полученных расчетных данных и измерений проекций угловой скорости на оси.чувствительности элементов 1 и 4 определяют проекции угловой скорости в связанной системе координат следующим образом.
По информации о скорости относительно осей Nn и N12 определяют проекцию вектора скорости на плоскость NiON4i по формуле
0)1 0)11 COS у +CW12 ; Sin у
где: 0)11, G)i2 - проекции угловых скоростей по осям Nn и N12 соответственно. По полученному значению и проекции скорости на ось N41 определяют проекцию угловой скорости по оси Ni no формуле:
UJ41
G))n -tg , .а
где охц - проекция угловой скорости на ось N41.
По полученному и измеренным значениям юн, , а)13, являющимся ортогональными проекциями в системе
0
5
0
5
0
5
0
5
0
5
координат, связанной с элементом 1, через направляющие косинусы осей Nn; N12; N1 определяют проекции вектора на оси связанной системы координат по формулам о аи1 -юн+ам2 0)12+ам о)
(L,y.z) при N11 (ахц; ауц; агц)
N12 (3x12. аУ 12- 3Z12)
Ni(axi;ay11;az1)
где ад - проекция вектора угловой скорости на i-ю ось связанной системы координат.
aijk - направляющий косинус между 1-й осью связанной системы координат и к-й осью j-ro чувствительного элемента.
aij - направляющий косинус между 1-й осью связанной системы координат и нормалью к плоскости осей чувствительности j-ro чувствительного элемента.
. Следует отметить, что возможны и другие алгоритмы обработки информации, например, по четырем осям чувствительности с двух чувствительных элементов, на основе информации с трех или четырех чувствительных элементов, а также на основе кватернионов или других математических аппаратов.
Таким образом в предлагаемом блоке двухканальных инерциальных чувствительных элементов обеспечивается определение требуемого вектора в системе координат, связанной с объектом, по любой паре из четырех чувствительных элементов, что обеспечивает требуемую надежность функционирования блока. При этом повышается точность измерения за счет прибли- жения используемых измерительных осей к ортогональной системе координат. Уменьшение погрешности видно из анализа фор- мулы по определению проекции .измеряемого вектора по нормали к плоскости расположения осей чувствительного элемента. При уменьшении угла между указанной нормалью и осью чувствительности другого элемента уменьшается влияние погрешностей по последней оси чувствительности за счет того, что возрастает знаменатель и приближается к единице, и уменьшается влияние погрешностей от измерения проекций в плоскости расположения осей чувствительности первого чувствительного элемента за счет уменьшения слагаемого, содержимого тангенс угла между нормалью и осью чувствительности второго датчика. Принимая, как отмечено ранее, что количественной характеристикой точности и чувствительности измерения является направляющий косинус между указанными нормалью и осью чувствительности по сравнению с прототипом она увеличивается с 0,5 до 0,866 или с 50 % до 86,6 % на 36,6%, если брать за базу идеальное расположение.
Формула изобретения 1. Блок инерциальных чувствительных элементов с избыточной структурой, содер- жащий четыре чувствительных элемента с двумя взаимно ортогональными осями чувствительности каждый, отличающий- с я тем, что, с целью повышения точности выходных значений трех взаимно ортогональных проекций измеряемого произвольно направленного векторного параметра, при использовании любой пары чувствительных элементов, плоскость, проходящая через оси чувствительности каждого из чувствительных элементов, совмещена с одной из четырех плоскостей, образован /V
ных осями октаэдр ической тетрады, причем каждая из осей октаэдрической тетрады совпадает с одной линией пересечения двух из четырех плоскостей, образованных осями чувствительности чувствительных элементов, а оси чувствительности каждого из чувствительных элементов расположены внутри меньшего из двух секторов, образованных осями октаэдрической тетрады, лежащими в плоскости, образованной осями чувствительности данного чувствительного элемента.
2. Блок поп. 1, отличаю щи йся-тем, что одна из осей чувствительности каждого
из чувствительных элементов направлена
по оси октаэдрической тетрады, при этом по каждой оси октаэдрической тетрады направлена одна ось чувствительности.
% 
Изобретение относится к измерению параметров углового движения в инерциальном пространстве. Цель изобретения - повышение точности выходных значений трех взаимно ортогональных фракций измеряемого произвольно направленного векторного параметра при использовании любой пары чувствительных элементов. Блок инерциальных чувствительных элементов с избыточной структурой содержит четыре двухосных чувствительных элементов. При этом плоскости расположения осей чувствительности чувствительных элементов совмещены с плоскостями октаэдриче- ской тетрады, а оси чувствительности расположены в меньшем секторе между осями октаэдрической тетрады, причем по каждой оси октаэдрической тетрады направлено по одной оси чувствительности чувствительных элементов. 4 ил.
| AIAA | |||
| Digital avionics sistems Conference, 1988, pp | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| Optimal optlcration of inertial sencorfuncions for Flight control and avionics Jnc K.Kroymann | |||
| Bodensuwerk Ceratetechih Gmbh., P.O | |||
| Box | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ КОПИРОВАНИЯ | 1923 |
|
SU1120A1 |
| Uberbingen/W -armang, ЦООИТИ, перевод, № 508 | |||
