Изобретение относится к области измерительной техники и может быть использовано для создания средств измерения координат, скорости и угловых величин объекта в автоматических схемах управления в прецизионном машиностроении и приборостроении.
Известно устройство, реализующее способ дистанционного определения положения объекта (Смирнов Б.М. Магнитометрический метод определения углового положения объекта / М. : Измерительная техника. 1996. N12. С.34-37). Известное устройство состоит из двух катушек индуктивности с взаимно ортогональными осями, генератора переменных напряжений, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, а третий и четвертый выходы - к выводам второй катушки индуктивности, двух трехкомпонентных датчиков, шести усилителей переменных напряжений, вход каждого из которых подключен к соответствующему выходу одного из трехкомпонентных датчиков, и двенадцати преобразовательных блоков. Параллельно соединенные первые входы первого и седьмого, второго и восьмого, третьего и девятого, четвертого и десятого, пятого и одиннадцатого, шестого и двенадцатого преобразовательных блоков подключены соответственно к выходам первого, второго, третьего, четвертого, пятого и шестого усилителей переменных напряжений. Вторые входы первого, второго, третьего, четвертого, пятого и шестого преобразовательных блоков подключены к пятому, а вторые входы седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого преобразовательных блоков подключены к шестому выходу генератора переменных напряжений. При этом оба трехкомпонентных датчика размещены на объекте.
Известное устройство работает следующим образом. Генератор переменных напряжений создает переменные напряжения с частотами f1 и f2, одно из которых подводится на первую катушку индуктивности, а второе напряжение подается на вторую катушку индуктивности. Токи, протекающие в катушках индуктивности, создают переменные магнитные поля с соответствующими частотами f1 и f2. Магнитные поля индуктируют три переменные ЭДС в каждом из трехкомпонентных датчиков, пропорциональные составляющим векторов магнитной индукции. Эти ЭДС усиливаются усилителями переменных напряжений, которые одновременно выполняют роль согласующих узлов между датчиками и преобразовательными блоками. Каждый преобразовательный блок состоит из полосового фильтра и синхронного детектора. Полосовые фильтры первого, второго, третьего, четвертого, пятого и шестого преобразовательных блоков настроены на переменные напряжения с частотой f1, а на синхронные детекторы этих блоков подается переменное напряжение с частотой f1 с пятого выхода генератора переменных напряжений. Полосовые фильтры седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого преобразовательных блоков настроены на переменные напряжения с частотой f2, а на синхронные детекторы этих блоков подается переменное напряжение с частотой f2 с генератора переменных напряжений. В результате этого преобразовательные блоки выделяют сигналы, пропорциональные составляющим векторов магнитной индукции, созданной катушками индуктивности в местах размещения датчиков. По измеренным в двух точках пространства значениям составляющих векторов магнитной индукции и взаимному расположению трехкомпонентных датчиков определяют координаты датчиков относительно катушек индуктивности, а, значит, и координаты объекта и векторы дипольных магнитных моментов катушек индуктивности, например, по алгоритму, изложенному в работе (Смирнов Б. М. Метод определения координат и магнитного момента дипольного источника поля. /М.: Измерительная техника. 1988. N9. С.40-42). Угловое положение катушек индуктивности, а, значит, и объекта определяют по направляющим косинусам векторов магнитных моментов упомянутых катушек индуктивности.
В известном устройстве при наличии электропроводящих поверхностей вблизи катушек индуктивности и датчиков переменное магнитное поле, созданное катушками индуктивности, отражается от электропроводящих поверхностей (магнитное поле вихревых токов) и индуктирует в трехкомпонентных датчиках переменные ЭДС ложного сигнала, что снижает точность определения положения объекта. Кроме того, в известном устройстве определение положения объекта осуществляется численным методом с большими затратами времени на обработку информации, требующим от вычислительного устройства значительного объема памяти.
Известно устройство для дистанционного определения положения объекта (Смирнов Б.М. Определение координат и углового положения объекта при наличии и отсутствии контакта с ним. /М.: Измерительная техника. 1998. N2. С. 30-34), которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство состоит из трехкомпонентного источника магнитного поля (три катушки индуктивности с взаимно ортогональными осями), трехкомпонентного магниточувствительного датчика с взаимно ортогональными осями чувствительности, размещенного на объекте, генератора переменных напряжений и девяти усилительно-преобразовательных блоков, из которых первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к первому выходу магниточувствительного датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к второму выходу магниточувствительного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к третьему выходу магниточувствительного датчика, а выходы всех усилительно-преобразовательных блоков являются выходами устройства. Первый и второй выходы генератора переменных напряжений подключены к выводам первой катушки индуктивности, третий и четвертый выходы генератора переменных напряжений подключены к выводам второй катушки индуктивности, пятый и шестой выходы этого генератора подключены к выводам третей катушки индуктивности. При этом вторые входы первого, четвертого и седьмого усилительно-преобразовательных блоков подключены к седьмому выходу генератора переменных напряжений, вторые входы второго, пятого и восьмого усилительно-преобразовательных блоков подключены к восьмому выходу генератора переменных напряжений, а вторые входы третьего, шестого и девятого усилительно-преобразовательных блоков подключены к девятому выходу этого генератора.
Известное устройство работает следующим образом. В катушках индуктивности, подключенных к генератору переменных напряжений, протекают переменные токи разных частот f1, f2, f3. В результате этого катушки индуктивности воспроизводят переменные магнитные поля с частотами f1, f2 и f3. В трехкомпонентном магниточувствительном датчике индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками индуктивности с соответствующими частотами f1, f2, f3. Эти ЭДС усиливаются и детектируются девятью усилительно-преобразовательными блоками, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы первого, четвертого и седьмого усилительно-преобразовательных блоков подается опорное напряжение с частотой f1 с генератора переменных напряжений, на вторые входы второго, пятого и восьмого усилительно-преобразовательных блоков подается опорное напряжение с частотой f2 с генератора переменных напряжений, на вторые входы третьего, шестого и девятого усилительно-преобразовательных блоков подается опорное напряжение с частотой f3 с генератора переменных напряжений, при этом на первые входы первого, второго и третьего усилительно-преобразовательных блоков подается сигнал с первого выхода датчика, на первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подается сигнал с второго выхода датчика, а на первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подается сигнал с третьего выхода датчика. В результате этого на выходах первого, четвертого и седьмого усилительно-преобразовательных блоков будет сигнал, пропорциональный составляющим вектора магнитной индукции, созданной первой катушкой индуктивности, на выходах второго, пятого и восьмого усилительно-преобразовательных блоков будет сигнал, пропорциональный составляющим вектора магнитной индукции, созданной второй катушкой индуктивности, и на выходах третьего, шестого и девятого усилительно-преобразовательных блоков будет сигнал, пропорциональный составляющим вектора магнитной индукции, созданной третьей катушкой индуктивности. По известным магнитным моментам катушек индуктивности и измеренным составляющим векторов магнитной индукции определяют координаты и угловое положение датчика в системе координат, образованной взаимно ортогональными осями катушек индуктивности.
В известном устройстве при наличии электропроводящих поверхностей вблизи катушек индуктивности (трехкомпонентного источника магнитного поля) и датчика переменное магнитное поле, созданное катушками индуктивности, отражается от электропроводящих поверхностей (магнитное поле вихревых токов) и индуктирует в датчике переменные ЭДС ложного сигнала, что снижает точность определения положения объекта. Кроме того, известное устройство не обеспечивает определение углового положения объекта, когда плоскость, проходящая через трехкомпонентный датчик и трехкомпонентный источник магнитного поля, перпендикулярна любой оси катушки индуктивности источника магнитного поля. Это ограничивает область пространства возможного определения положения объекта.
Задачей предлагаемого изобретения является создание устройства для дистанционного определения положения объекта, отличающегося от прототипа существенным уменьшением зависимости определения положения объекта от магнитного поля вихревых токов электропроводящих поверхностей и более широкой областью пространства возможного определения положения объекта.
Поставленная задача дистанционного определения положения объекта решается за счет измерения трехкомпонентным магниточувствительным датчиком, размещенным на объекте, составляющих векторов магнитной индукции, воспроизводимой источником магнитного поля, в частности, тремя катушками индуктивности, а также измерении углов места и крена объекта с помощью трех акселерометрических датчиков и углов места и крена источника магнитного поля с помощью трех дополнительных акселерометрических датчиков. Кроме того, поставленная задача дистанционного определения положения объекта решается за счет измерения составляющих вектора магнитной индукции геомагнитного поля двумя трехкомпонентными магниточувствительными датчиками, углов места и крена первого трехкомпонентного датчика с помощью трех акселерометрических датчиков, размещенных с первым трехкомпонентным датчиком на объекте, и измерении углов места и крена второго трехкомпонентного датчика с помощью трех дополнительных акселерометрических датчиков.
Предлагаемое изобретение представляет собой два устройства для дистанционного определения положения объекта, связанных между собой настолько, что они образуют единый общий изобретательский замысел.
Предлагаемое устройство для дистанционного определения положения объекта (по первому варианту), включающее трехкомпонентный источник магнитного поля, состоящий из трех катушек индуктивности с взаимно ортогональными осями, трехкомпонентный магниточувствительный датчик с взаимно ортогональными осями чувствительности, размещенный на объекте, девять усилительно-преобразовательных блоков, из которых первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к первому выходу магниточувствительного датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к второму выходу магниточувствительного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к третьему выходу магниточувствительного датчика, а выходы всех усилительно-преобразовательных блоков являются выходами устройства, и генератор переменных напряжений, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, третий и четвертый выходы подключены к выводам второй катушки индуктивности, пятый и шестой выходы подключены к выводам третьей катушки индуктивности, седьмой выход подключен к вторым входам первого, четвертого и седьмого усилительно-преобразовательных блоков, восьмой выход подключен к вторым входам второго, пятого и восьмого усилительно-преобразовательных блоков и девятый выход - к вторым входам третьего, шестого и девятого усилительно-преобразовательных блоков, снабжено тремя основными акселерометрическими датчиками с взаимно ортогональными осями чувствительности, размещенными на объекте, тремя дополнительными акселерометрическими датчиками с взаимно ортогональными осями чувствительности и блоком усиления разностных сигналов, входы которого подключены к выходам основных и дополнительных акселерометрических датчиков, а три выхода этого блока являются выходами устройства, при этом оси чувствительности основных акселерометрических датчиков коллинеарны соответствующим осям чувствительности магниточувствительного датчика, а оси чувствительности дополнительных акселерометрических датчиков коллинеарны соответствующим осям трех катушек индуктивности.
Предлагаемое устройство для дистанционного определения положения объекта (по второму варианту), включающее трехкомпонентный магниточувствительный датчик с взаимно ортогональными осями чувствительности, размещенный на объекте, генератор переменных напряжений и шесть усилительно-преобразовательных блоков, у которых первый вход первого усилительно-преобразовательного блока подключен к первому выходу магниточувствительного датчика, первый вход второго усилительно-преобразовательного блока подключен к второму выходу магниточувствительного датчика, первый вход третьего усилительно-преобразовательного блока подключен к третьему выходу магниточувствительного датчика, вторые входы всех усилительно-преобразовательных блоков подключены к первому выходу генератора переменных напряжений, а выходы упомянутых усилительно- преобразовательных блоков являются выходами устройства, снабжено тремя основными акселерометрическими датчиками с взаимно ортогональными осями чувствительности, размещенными на объекте, тремя дополнительными акселерометрическими датчиками с взаимно ортогональными осями чувствительности, блоком усиления разностных сигналов, входы которого подключены к выходам основных и дополнительных акселерометрических датчиков, а три выхода этого блока являются выходами устройства, и дополнительным трехкомпонентным магниточувствительным датчиком, у которого первый выход подключен к первому входу четвертого усилительно- преобразовательного блока, второй выход подключен к первому входу пятого усилительно-преобразовательного блока, третий выход подключен к первому входу шестого усилительно-преобразовательного блока, при этом оси чувствительности основных акселерометрических датчиков коллинеарны соответствующим осям чувствительности основного магниточувствительного датчика, оси чувствительности дополнительных акселерометрических датчиков коллинеарны соответствующим осям чувствительности дополнительного магниточувствительного датчика, а входы основного и дополнительного магниточувствительных датчиков подключены к второму выходу генератора переменных напряжений.
Применение в предлагаемом техническом решении по первому варианту трехкомпонентного источника магнитного поля, состоящего из трех катушек индуктивности с взаимно ортогональными осями, трехкомпонентного магниточувствительного датчика с взаимно ортогональными осями чувствительности, размещенного на объекте, девяти усилительно-преобразовательных блоков и генератора переменных напряжений, включенных между собой определенным образом, в совокупности с тремя основными и тремя дополнительными акселерометрическими датчиками и блоком усиления разностных сигналов, подключенного к основным и дополнительным акселерометрическим датчикам, обеспечивает определение координат и углового положения объекта при существенном уменьшении зависимости определения углового положения объекта от магнитного поля, созданного вихревыми токами электропроводящих поверхностей, размещенных вблизи трехкомпонентного источника магнитного поля и трехкомпонентного магниточувствительного датчика, и при уменьшении ограничений по взаимному расположению относительно друг друга источника магнитного поля и датчика, что увеличивает область пространства возможного определения положения объекта.
Применение в предлагаемом техническом решении по второму варианту трехкомпонентного магниточувствительного датчика, размещенного на объекте, генератора переменных напряжений и шести усилительно-преобразовательных блоков в совокупности с тремя основными акселерометрическими датчиками, размещенными на объекте, у которых оси чувствительности коллинеарны соответствующим осям чувствительности основного магниточувствительного датчика, тремя дополнительными акселерометрическими датчиками, дополнительным трехкомпонентным магниточувствительным датчиком с взаимно ортогональными осями чувствительности, коллинеарными соответствующим осям чувствительности дополнительных акселерометрических датчиков, и блоком усиления разностных сигналов, включенных между собой определенным образом, обеспечивает определение положения объекта при существенном уменьшении зависимости определения углового положения объекта от магнитного поля вихревых токов электропроводящих поверхностей и при любом местоположении основного магниточувствительного датчика, а, значит, и объекта относительно дополнительного магниточувствительного датчика, за исключением только случая, когда устройство находится на магнитном полюсе, что увеличивает область пространства возможного определения положения объекта.
Таким образом, технический результат предлагаемого устройства для дистанционного определения положения объекта выражается в существенном уменьшении зависимости определения положения объекта от магнитного поля вихревых токов электропроводящих поверхностей, что повышает точность определения положения объекта. Кроме того, технический результат предлагаемого устройства выражается в увеличении области пространства возможного определения положения объекта.
Сущность предлагаемого изобретения поясняется следующими графическими материалами.
На фиг.1 изображена структурная схема устройства для дистанционного определения положения объекта по первому варианту.
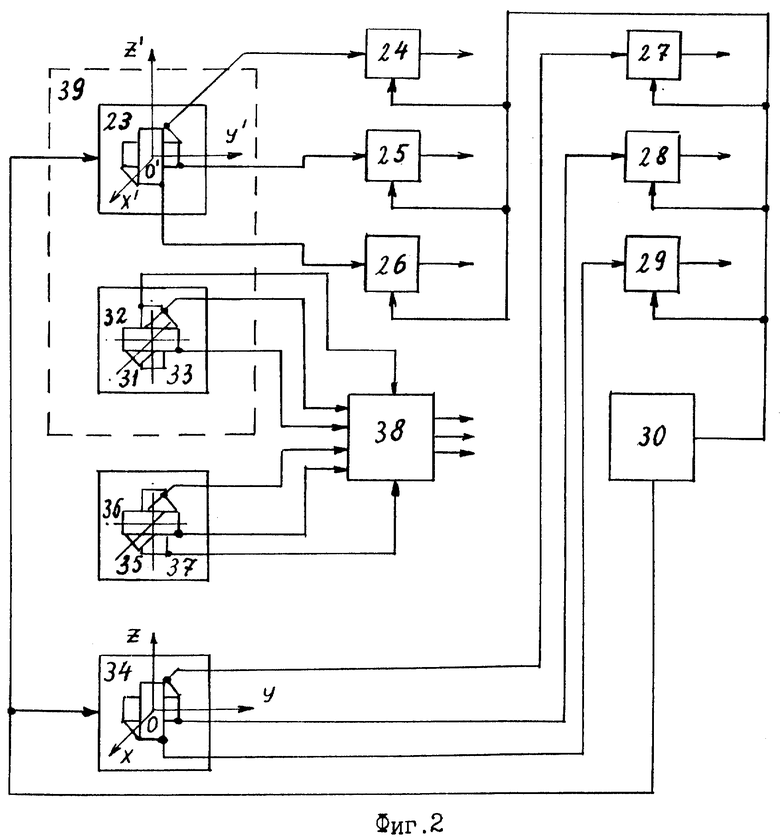
На фиг.2 изображена структурная схема устройства для дистанционного определения положения объекта по второму варианту.
Предлагаемое устройство для дистанционного определения положения объекта по первому варианту состоит (фиг. 1) из трехкомпонентного магниточувствительного датчика 1 с взаимно ортогональными осями чувствительности, являющимися осями декартовой системы координат О'X'Y'Z', девяти усилительно-преобразовательных блоков 2-10, выходы которых являются выходами устройства, генератора переменных напряжений 11, источника магнитного поля, выполненного в виде трех катушек индуктивности 12-14 с взаимно ортогональными осями, совпадающими с осями декартовой системы координат OXYZ, трех основных акселерометрических датчиков 15-17, оси чувствительности которых коллинеарны соответствующим осям O'X', O'Y' и O'Z' датчика 1, трех дополнительных акселерометрических датчиков 18-20, оси чувствительности которых коллинеарны соответствующим осям OX, OY, OZ катушек индуктивности 13, 12, 14, блока усиления разностных сигналов 21, входы которого подключены к выходам акселерометрических датчиков 15-20, а выходы являются выходами устройства, и подвижного объекта 22, на котором размещены датчики 1, 15-17. При этом первые входы блоков 2-4 подключены к первому выходу датчика 1, первые входы блоков 5-7 подключены к второму выходу датчика 1, первые входы блоков 8-10 подключены к третьему выходу датчика 1, первый и второй выходы генератора 11 подключены к выводам катушки 13, третий и четвертый выходы генератора 11 подключены к выводам катушки 12, пятый и шестой выходы генератора 11 подключены к выводам катушки 14, седьмой выход генератора 11 подключен к вторым входам блоков 2, 5 и 8, восьмой выход генератора 11 подключен к вторым входам блоков 3, 6 и 9, а девятый выход генератора 11 подключен к вторым входам блоков 4, 7 и 10.
Предлагаемое устройство для дистанционного определения положения объекта по второму варианту состоит (фиг.2) из трехкомпонентного магниточувствительного датчика 23 с взаимно ортогональными осями чувствительности, являющимися осями декартовой системы координат O'X'Y'Z', шести усилительно-преобразовательных блоков 24-29, выходы которых являются выходами устройства, генератора переменных напряжений 30, трех основных акселерометрических датчиков 31-33, оси чувствительности которых коллинеарны соответствующим осям O'X', O'Y', O'Z' датчика 23, трехкомпонентного магниточувствительного датчика 34 с взаимно ортогональными осями чувствительности, являющимися осями декартовой системы координат OXYZ, трех дополнительных акселерометрических датчиков 35-37, оси чувствительности которых коллинеарны соответствующим осям OX, OY, OZ датчика 34, блока усиления разностных сигналов 38, входы которого подключены к выходам акселерометрических датчиков 31-33 и 35-37, а выходы являются выходами устройства, и подвижного объекта 39, на котором размещены датчики 23, 31-33. При этом первый вход блока 24 подключен к первому выходу датчика 23, первый вход блока 25 подключен к второму выходу датчика 23, первый вход блока 26 подключен к третьему выходу датчика 23, первый вход блока 27 подключен к первому выходу датчика 34, первый вход блока 28 подключен к второму выходу датчика 34, первый вход блока 29 подключен к третьему выходу датчика 34, первый выход генератора 30 подключен к вторым входам блоков 24-29, а второй выход - к входам датчиков 23 и 34.
Предлагаемое устройство для дистанционного определения положения объекта по первому варианту работает следующим образом. В катушках 12-14 (фиг. 1), подключенных к генератору 11, протекают переменные токи разных частот. В результате этого катушки 12-14 воспроизводят переменные магнитные поля с частотами f1, f2, f3. В трехкомпонентном датчике 1 (например, в пассивном индукционном датчике) индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 12-14 с соответствующими частотами f1, f2, f3. Эти ЭДС усиливаются и детектируются блоками 2-10, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы блоков 2-10 подаются опорные напряжения с соответствующими частотами f1, f2, f3 с генератора 11, а на первые входы этих блоков 2-10 подаются с соответствующих выходов датчика 1 переменные ЭДС. В результате этого на выходах блоков 2-10 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданной катушками 12-14: проекциям векторов магнитной индукции B'x1, B'x2, B'x3 на ось O'X' с выходов блоков 2-4, подключенных к первому выходу датчика 1; проекциям векторов магнитной индукции B'y1, B'y2, B'y3 на ось O'Y' с выходов блоков 5-7, подключенных к второму выходу датчика 1; проекциям векторов магнитной индукции B'z1, B'z2, B'z3 на ось O'Z' с выходов блоков 8-10, подключенных к третьему выходу датчика 1, где O'X', O'Y', O'Z' - оси системы координат O'X'Y'Z', жестко связанные с осями датчика 1, а, значит, и с объектом 22.
Измеряемое датчиком 1 (фиг.1) магнитное поле, созданное катушками 12-14, можно аппроксимировать магнитным полем диполя, если максимальные линейные размеры катушек 12-14 существенно меньше расстояния между катушками и датчиком 1 или при условии, что для каждой катушки 12- 14 отношение ее длины к диаметру равно  (Афанасьев Ю. В. , Студенцов Н.В., Хорев В.Н. и др. Средства измерений параметров магнитного поля. Л.: Энергия, 1979. С.68). В таком случае, расстояние r от датчика 1 до трехкомпонентного источника магнитного поля (катушек 12-14) и координаты датчика 1 в декартовой системе координат OXYZ, оси которой совпадают с осями катушек 12-14, можно представить в следующем виде:
(Афанасьев Ю. В. , Студенцов Н.В., Хорев В.Н. и др. Средства измерений параметров магнитного поля. Л.: Энергия, 1979. С.68). В таком случае, расстояние r от датчика 1 до трехкомпонентного источника магнитного поля (катушек 12-14) и координаты датчика 1 в декартовой системе координат OXYZ, оси которой совпадают с осями катушек 12-14, можно представить в следующем виде:
x = [2(a•B1)2•R-1/3]•r;
y = [2(b•B2)2•R-1/3]•r;
z = (2•B3 2•R-1/3)•r;
где μo= 4π•10-7 Гн/м; a = Mz/Mx; b = Mz/My; B1 = (B'x1)2+(B'y1)2+ (B'z1)2;
B2 = (B'x2)2+(B'y2)2+ (B'z2)2;
B3 = (B'x3)2+(B'y3)2+ (B'z3)2;
R = [(a•B1)2+(b•B2)2+ (N3)2]-1;
Mx, My, Mz - магнитные моменты, созданные соответствующими катушками 13, 12, 14 (фиг. 1); x, y, z - координаты датчика 1 в системе координат OXYZ источника магнитного поля.
Знаки координат датчика 1 определяются, как и в прототипе, октантом расположения этого датчика в системе координат OXYZ.
Выходные сигналы с акселерометрических датчиков 15-20 (фиг.1) пропорциональны проекциям вектора ускорения силы тяжести на оси чувствительности этих датчиков (Миловзоров Г.В. Моделирование и исследование инструментальных погрешностей трехкомпонентного акселерометрического преобразователя наклона. /M. : Измерительная техника. 1996. N10. С.22-26; Шваб И.А., Селезнев А.В. Измерение угловых ускорений. M.: "Машиностроение" 1983. 160 С.). Вектор ускорения силы тяжести перпендикулярен плоскости горизонта, поэтому выходные сигналы с датчиков 15-17, размещенных на объекте 22, пропорциональны направляющим косинусам n11, n21, n31, Бронштейн И.Н., Семендяев К.А. Справочник по математике. M. : "Наука" 1967. С.218, 219) вектора ускорения силы тяжести в системе координат, образованной осями чувствительности O'X', O'Y', O'Z' датчика 1 или осями чувствительности датчиков 15-17. Выходные же сигналы с датчиков 18-20, оси чувствительности которых коллинеарны осям соответствующих катушек 13, 12, 14, пропорциональны направляющим косинусам n12, n22, n32 вектора ускорения силы тяжести в системе координат OXYZ. По измеренным направляющим косинусам определяют углы крена θ1 и места ψ1 объекта 22 и углы крена θ2 и места ψ2 источника магнитного поля из следующих выражений:
θ1= arctg(n21/n31);
ψ1= arctg(-n11sinθ1/n21)
или
ψ1= arctg(-n11cosθ1/n31);
θ2= arctg(n22/n32);
ψ2= arctg(-n12sinθ2/n22)
или
ψ2= arctg(-n12cosθ2/n32).
Углы крена θ и места ψ датчика 1 (фиг. 1) или объекта 22 в системе координат OXYZ определим из следующих выражений:
θ = θ1-θ2;
ψ = ψ1-ψ2.
Сигналы, пропорциональные углам θ и ψ, снимаются с выходов блока 21.
Угол курса ϕ датчика 1 в системе координат OXYZ определяют из системы двух выбранных уравнений из трех следующих уравнений с неизвестными cosϕ и sinϕ, взяв ту пару уравнений, у которых определитель имеет максимальное значение по модулю:
d11cosϕ+d12sinϕ = c1;
d21cosϕ+d22sinϕ = c2;
d31cosϕ+d32sinϕ = c3,
где 

По расчетным значениям cosϕ и sinϕ определяют
В предлагаемом техническом решении по первому варианту углы ψ и θ определяют с помощью акселерометрических датчиков, принцип действия которых основан на измерении проекций вектора ускорения силы тяжести, а, значит, результаты измерений этих углов не зависят от переменных магнитных полей катушек 12-14 (фиг.1) и магнитного поля вихревых токов электропроводящих поверхностей, находящихся вблизи датчика 1 и катушек индуктивности 12-14. Значение угла ϕ имеет существенно меньшую зависимость от магнитного поля вихревых токов электропроводящих поверхностей по сравнению с прототипом, так как определяется как функция измеренных проекций векторов магнитной индукции, созданной катушками индуктивности 12-14, магнитного поля вихревых токов (источника ложной информации) и углов ψ и θ, являющихся функциями проекций вектора ускорения силы тяжести на оси чувствительности датчиков 15-20 и не зависящих от вихревых токов электропроводящих поверхностей и магнитного поля катушек 12-14. Кроме того, предлагаемое техническое решение обеспечивает определение углового положения объекта во всем пространстве наблюдения за исключением, когда датчик 1 и трехкомпонентный источник магнитного поля размещены в плоскости OXY или на оси OZ. Все это существенно увеличивает область пространства возможного определения положения объекта по сравнению с прототипом.
Предлагаемое устройство для дистанционного определения положения объекта по второму варианту работает следующим образом. На входы трехкомпонентных датчиков 23 и 34 (фиг.2), например феррозондовых датчиков, подается переменное напряжение с генератора 30, перемагничивающее магниточувствительные элементы этих датчиков. В результате этого на трех выходах каждого из датчиков 23 и 34 появляются ЭДС с удвоенной частотой перемагничивания, которые пропорциональны проекциям вектора магнитной индукции геомагнитного поля на оси чувствительности датчиков 23 и 34 (Афанасьев Ю.В. Феррозондовые приборы. Л. : "Энергоатомиздат" 1986. 188 С.). Выходные сигналы с датчиков 23 и 34 усиливаются и детектируются соответствующими блоками 24-29. Для этого на вторые входы блоков 24-29 подается переменное напряжение с генератора 30. Поэтому выходные сигналы с блоков 24-29 будут пропорциональны следующим значениям проекций вектора магнитной индукции геомагнитного поля: проекции вектора магнитной индукции Bx1 на ось O'X' с выхода блока 24; проекции вектора магнитной индукции By1 на ось O'Y' с выхода блока 25; проекции вектора магнитной индукции Bz1 на ось O'Z' с выхода блока 26; проекции вектора магнитной индукции Bx2 на ось OX с выхода блока 27; проекции вектора магнитной индукции By2 на ось OY с выхода блока 28; проекции вектора магнитной индукции Bz2 на ось OZ с выхода блока 29.
Выходные сигналы с акселерометрических датчиков 31-33, 35-37 (фиг.2) пропорциональны проекциям вектора ускорения силы тяжести на оси чувствительности этих датчиков (Миловзоров Г.В. Моделирование и исследование инструментальных погрешностей трехкомпонентного акселерометрического преобразователя наклона. /М.: Измерительная техника. 1996. N10. С.22-26; Шваб И.А., Селезнев А.В. Измерение угловых ускорений. М.: "Машиностроение" 1983. 160 С. ). Вектор ускорения силы тяжести перпендикулярен плоскости горизонта, поэтому выходные сигналы с датчиков 31-33, размещенных на объекте 39, пропорциональны направляющим косинусам
n11, n21, n31, вектора ускорения силы тяжести в системе координат, образованной осями чувствительности O'X', O'Y', O'X' датчика 23 или осями чувствительности датчиков 31-33. Выходные же сигналы с датчиков 35-37, оси чувствительности которых коллинеарны соответствующим осям чувствительности датчика 34, пропорциональны направляющим косинусам n12, n22, n32 вектора ускорения силы тяжести в системе координат OXYZ. По измеренным направляющим косинусам определяют углы крена θ1 и места ψ1 объекта 39 и углы крена θ2 и места ψ2 датчика 34 аналогично, как и для технического решения по первому варианту.
Углы крена θ и места ψ датчика 23 (фиг. 2) или объекта 39 в системе координат OXYZ определяют из следующих выражений:
θ = θ1-θ2;
ψ = ψ1-ψ2.
Сигналы, пропорциональные углам θ и ψ, снимаются с выходов блока 38.
Значения тангенсов углов курса датчиков 23 и 34 представлены в виде следующих выражений:
tgϕ1= F1/S1;
tgϕ2= F2/S2;
где ϕ1 и ϕ2 - углы курсов датчиков 23 и 34 в геомагнитной системе координат (Яновский Б.М. Земной магнетизм. Л.: ЛГУ. 1978. 592 С.), в которой одна ось является касательной к магнитному меридиану, направлена в сторону севера и принята за ось отсчета курсового угла, вторая ось направлена по вертикали вниз и совпадает с вектором ускорения силы тяжести, а третья ось перпендикулярна плоскости магнитного меридиана и направлена в сторону востока;
F1= Bz1sinθ1-By1cosθ1;
S1= Bx1cosψ1+(By1sinθ1+Bz1cosθ1)•sinψ1;
F2= Bz2sinθ2-By2cosθ2;
S2= Bx2cosψ2+(By2sinθ2+Bz2cosθ2)•sinψ2,
при этом θ1 и ψ1, θ2 и ψ2 - углы крена и места соответствующих датчиков 23 и 34 в геомагнитной системе координат.
Значения ϕ1 и ϕ2 определяют из выражений:
Угол курса ϕ датчика 23 в системе координат OXYZ будет иметь значение
ϕ = ϕ1-ϕ2.
В предлагаемом техническом решении по второму варианту углы крена θ и места ψ определяют, как и в устройстве по первому варианту, с помощью акселерометрических датчиков, принцип действия которых основан на измерении проекций вектора ускорения силы тяжести, а значение угла курса ϕ определяют по измеренным проекциям вектора магнитной индукции постоянного геомагнитного поля и измеренным углам крена θ и места ψ, при этом в предлагаемом техническом решении отсутствуют источники переменных магнитных полей, а, значит, результаты измерений θ, ψ, ϕ, которые определяют угловое положение объекта, не зависят от переменных магнитных полей вихревых токов электропроводящих поверхностей. Кроме того, предлагаемое устройство обеспечивает определение углового положения датчика 23 (фиг.2), а, значит, и объекта 39, при любом его местоположении относительно датчика 34, за исключением тех случаев, когда предлагаемое устройство находится на магнитном полюсе, где вектор магнитной индукции геомагнитного поля коллинеарен вектору ускорения силы тяжести. Следовательно, предлагаемое устройство обеспечивает существенное увеличение области пространства возможного определения положения объекта.
Таким образом, технический результат предлагаемого устройства для дистанционного определения положения объекта (его варианты) выражается в существенном уменьшении зависимости определения положения объекта от магнитного поля вихревых токов электропроводящих поверхностей и увеличении области пространства возможного определения положения объекта.
Следует также отметить, что в предлагаемом техническом решении по первому варианту значительно ослаблено влияние магнитного поля вихревых токов электропроводящих поверхностей, а это обеспечивает возможность определения положения объекта на расстоянии между объектом и источником магнитного поля существенно большем чем в прототипе. В предлагаемом техническом решении по второму варианту расстояние между основным и дополнительным трехкомпонентными датчиками, на котором определяют положение объекта (основного трехкомпонентного датчика), не зависит от магнитного поля вихревых токов электропроводящих поверхностей, что обеспечивает возможность определения положения объекта на расстоянии между основным и дополнительным датчиками значительно большем чем расстояние между датчиком и источником магнитного поля в устройстве, принятом за прототип.
Использование в заявляемом техническом решении (по первому и второму вариантам) вычислительного блока позволит автоматизировать процесс определения положения объекта. Для этого выходы усилительно-преобразовательных блоков и блока усиления разностных сигналов предлагаемого устройства (его вариантов) следует подключить, например, к преобразователю измерительному многоканальному (ПИМ-1, сертификат N 15660-96, Госстандарт России), разработанному АО "АТИС" (г. С.-Петербург).
В предлагаемом устройстве (его вариантах) катушки индуктивности могут быть выполнены в виде мер магнитного момента, трехкомпонентные пассивные магниточувствительные датчики могут быть реализованы из пассивных однокомпонентных индукционных датчиков (Чернышев Е.Т., Чечурина Е.Н., Чернышева Н.Г., Студенцов Н. В. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов. 1969. С.41-42, 59-62), а трехкомпонентные активные магниточувствительные датчики и усилительно- преобразовательные блоки могут быть выполнены аналогично как и в известном устройстве (Афанасьев Ю.В. Феррозондовые приборы. Л. : "Энергоатомиздат". 1986. С.108-110, 117, 127-139, 162-168). Акселерометрические датчики могут быть выполнены аналогично известным датчикам (Шваб И. А. , Селезнев А. В. Измерение угловых ускорений. М.: "Машиностроение" 1983. С.20-28, 160 С.; Миловзоров Г.В. Моделирование и исследование инструментальных погрешностей трехкомпонентного акселерометрического преобразователя наклона. /М.: Измерительная техника. 1996. N 10. С. 22-26), а блоки разностных сигналов могут быть выполнены по схеме, приведенной в работе (Шило B.Л. Линейные интегральные схемы. М.: "Советское радио" 1979. 368 С.).
Устройство может быть использовано для создания средств измерения координат и угловых величин объекта в автоматических схемах управления в прецизионном машиностроении и приборостроении. Трехкомпонентный источник магнитного поля состоит из трех катушек индуктивности с взаимно ортогональными осями. Трехкомпонентный магниточувствительный датчик с взаимно ортогональными осями чувствительности размещен на объекте. Устройство также содержит девять усилительно-преобразовательных блоков, генератор переменных напряжений, три основных акселерометрических датчика, оси чувствительности которых коллинеарны соответствующим осям чувствительности трехкомпонентного магниточувствительного датчика, три дополнительных акселерометрических датчика, оси чувствительности которых коллинеарны соответствующим осям катушек индуктивности, и усилитель разностных сигналов. Устройство по второму варианту включает основной трехкомпонентный магниточувствительный датчик с взаимно ортогональными осями чувствительности, размещенный на объекте, дополнительный трехкомпонентный магниточувствительный датчик с взаимно ортогональными осями чувствительности, генератор переменных напряжений, шесть усилительно-преобразовательных блоков, три основных акселерометрических датчика, размещенных на объекте, оси чувствительности которых коллинеарны соответствующим осям чувствительности основного трехкомпонентного датчика, три дополнительных акселерометрических датчика, оси чувствительности которых коллинеарны соответствующим осям чувствительности дополнительного трехкомпонентного магниточувствительного датчика, и блок усиления разностных сигналов. Обеспечивается повышение точности определения положения объекта. 2 с.п. ф-лы, 2 ил.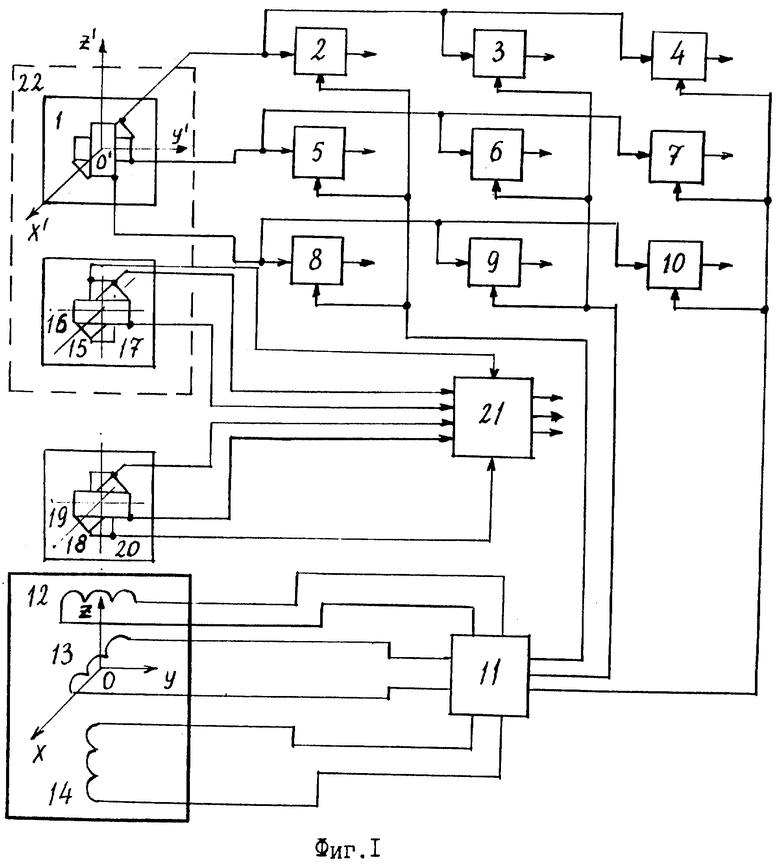
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| СИСТЕМА КУРСА И ВЕРТИКАЛИ И СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО КУРСА | 1994 |
|
RU2085850C1 |
| US 4767988 A, 30.08.88. | |||

