Изобретение относится к землёройно- транспортным машинам, а в частности к бульдозерам, оснащенным системами автоматики.
Целью изобретения является увеличение производительности путем повышения точности поддержания заданного направления движения и повышение надежности за счет снижения динамических нагрузок на рабочем органе и трансмиссии.
Предлагаемое изобретение поясняется чертежом
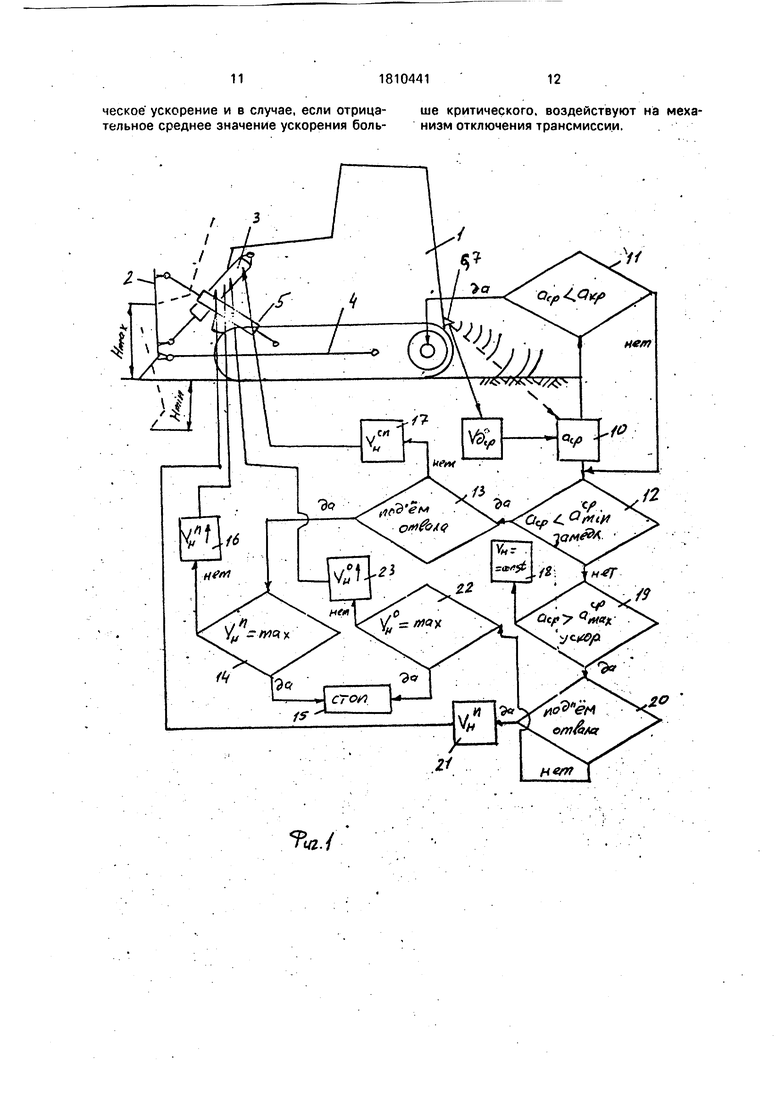
На фиг. 1 изображен бульдозер, на котором реализован предлагаемый способ,
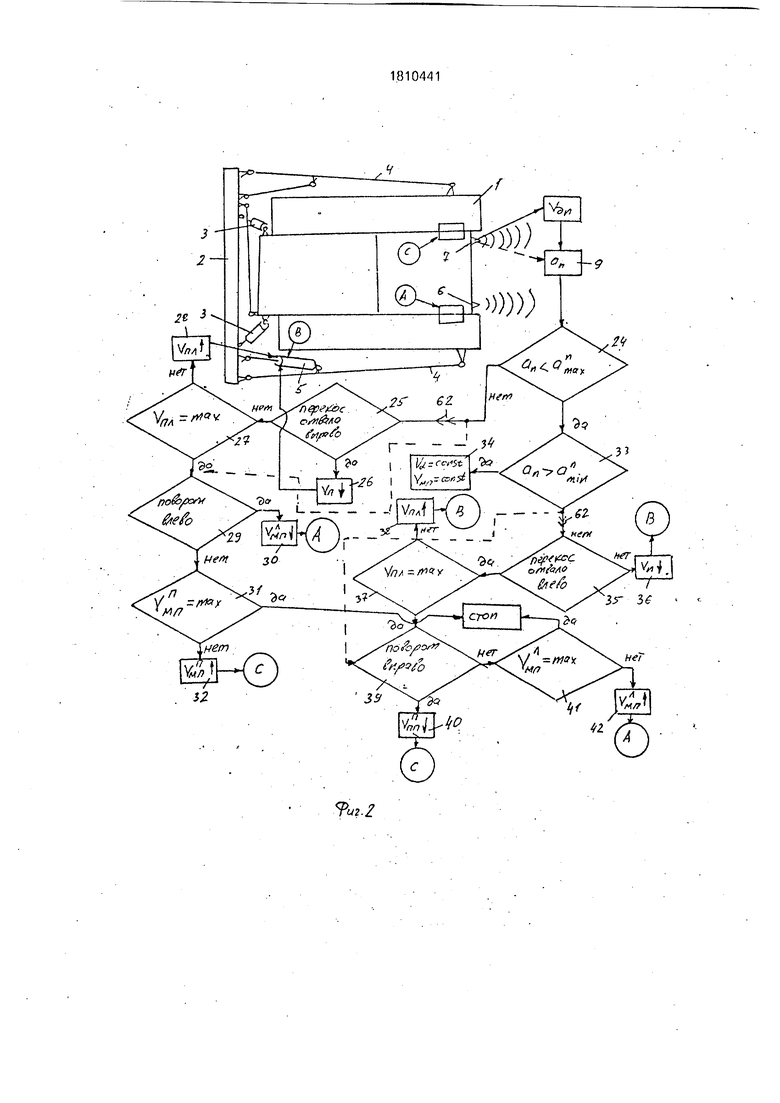
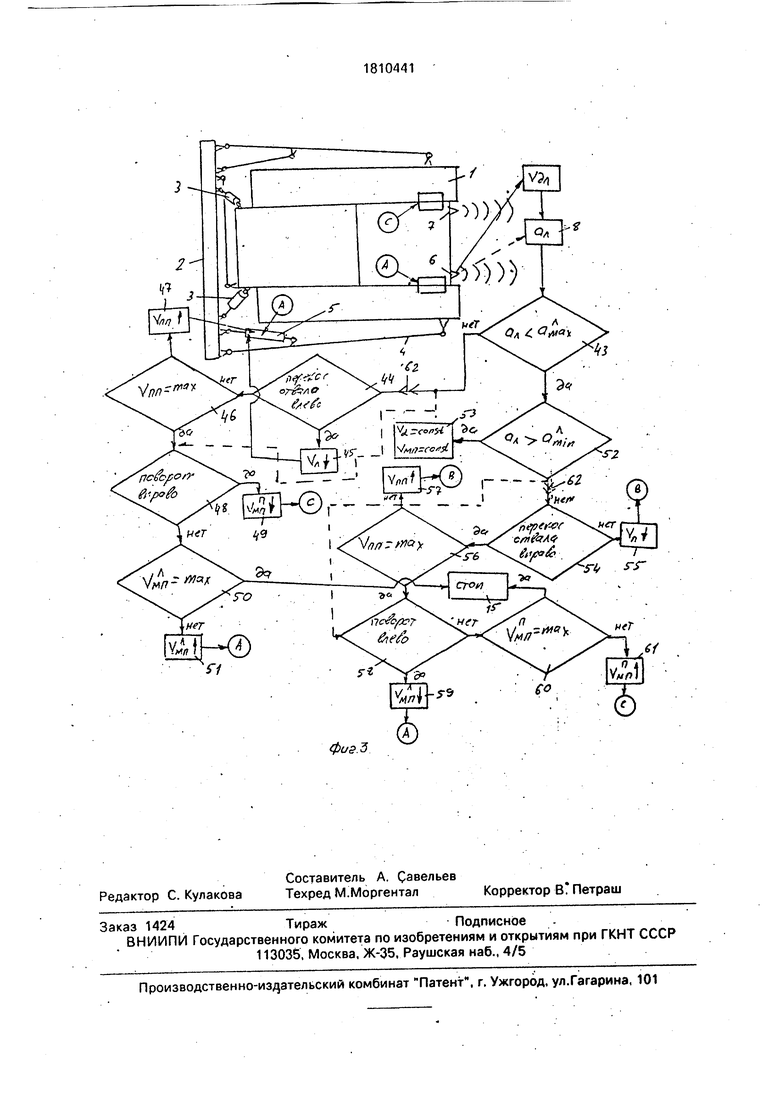
вид сбоку; на фиг.2 - вид сверху, управление правым бортом бульдозера; на фиг.З - вид сбоку, управление левым бортом бульдозера.
Указанный способ осуществляют следующим образом.
Управление идет по двум каналам в следующей последовательности.
1. Для точного поддержания заданного направления движения при повороте.
1.1 Замеряют величину и знак действительных ускорений левого a/i и правого ап бортов: по величине скорости в единицу времени V/i и Vn или непосредственно по
00
о
Јь
показаниям датчиков, установленных по бортам машины типа акселерометров (см, например, книгу В.Е.Мельникова Электромеханические преобразователи на базе кварцевого стекла, М., Машиностроение, .1984,159с.).
1.2 Сравнивают найденную величину с учетом знака с максимально возможным значением ускорения борта атэх (атах 0), если ускорение какого либо борта ал атахл или ап атахп (происходит разгон борта больше допустимой величины), подается сигнал на изменение интенсивности воздействия на скорость перекашивания отвала, если происходит перекашивание отвала. При перекашивании отвала влево при ал атахл скорость перкашивания отвала влево увеличивается, при ал атахл и перекашивании отвала вправо скорость перекашивания отвала вправо уменьшается до выполнения условия ал атахл. При достижении максимальной скорости перекоса, при работающем механизме поворота и при ал Зтахя, если включен левый механизм поворота и тормозится левый борт, то скорость торможения левого борта увеличивается до выполнения условия ал атах. Если включен правый механизм поворота и тормозится правый борт машины, то при ал атах скорость торможения правого борта уменьшится до выполнения условия ал атахл. Если отключен механизм перекоса (при планировочных работах), то корректировка ускорений бортов происходит сразу механизмом поворота бортов. Аналогичные операции происходят и при ап
атах
1.3. Сравнивают найденную величину с учетом знака ускорения бортов ал и ап с минимально возможным ускорением борта amin (amin 0). Если ускорение ал или ускорение ап меньше минимально допустимого (происходит замедление борта больше необходимого), то при включенном перекосе отвала при перекашивании отвала вправо и, например, при ап aminn, скорость перекоса отвала вправо уменьшается, а при перекашивании отвала влево, скорость перекашивания увеличивается до выполнения условия ап aminn. При достижении максимальной скорости перекоса отвала и при ап- 3minn и при включенном правом механизме поворота борта (тормозится правый борт) скорость торможения правого борта (интенсивность воздействия на механизм стабилизации скоростей бортов) уменьшается, а при торможении левого борта машины (включен левый механизм поворота) скорость торможения левого борта увеличивается до выполнения условия an aminn.
При планировочных работах, когда отвал должен сохранять необходимый угол перекоса, корректировка ускорений бортов про- . исходит изменением интенсивности.
воздействия на механизм стабилизации скоростей бортов, роста или снижения скоростей бортов. Если ал или ап находится в пределах amin и атах, то интенсивность изменения скоростей перекоса и скоростей
поворота остается неизменной.
2. Для снижения динамических нагрузок на отвале и поддержания среднего ускорения бульдозера в заданных пределах перед поворотом бульдозера или в процессе поворота бульдозера.
2.1. Определяют величину и знак средЗд + Эп
него ускорения аср
2.2 Сравнивают аср с критическим значением отрицательного ускорения бульдозера аКр (акр 0), которое указывает на то, что отвал бульдозера встретился с жестким непреодолимым препятствием. При аср акр происходит отключение, трансмиссии от гусеничных тележек. При этом инерционные силы вращающихся масс двигателя, коробки передач и трансмиссии не складываются с динамическими усилиями на отвале, возникающими от движения поступательных
масс (отвала, силовой рамы трактора и других), и динамическая сила на отвале уменьшается. Тем самым бульдозер предохраняется от критических пиковых нагрузок.
2.3 При агр акр среднее ускорение аСр сравнивается с минимально возможным допускаемым ускорением всего бульдозера acpmin. При acpmin эср происходит увеличение интенсивности подъема отвала при
подъеме отвала и уменьшение интенсивности при опускании отвала (интенсивности воздействия на механизм подъема и спуска- / ния отвала). 2.4.При аср асота,где асртах максимально
возможное допускаемое ускорение всего бульдозера, происходит увеличение интен- сивности опускания отвала при опускании , отвала и уменьшение интенсивности опускания отвала при подъеме отвала.
2.5. Если после указанных операций 2.2. и 2.3. условие acpmin аср асртах и операций 1.2. и 1.3. условие aminn ап атахп и аттл ал атахл не выполняется, происходит отключение двигателя и всех систем
бульдозера, вызов механика,
2.6. При выполнении условий аср аср асртах; аттл ал атахл; amin ап атахп интенсивность воздействия на механизм подъема и опускания отвала и стабилизации скоростей бортов остается неизменной.
Бульдозер, на котором реализован предлагаемый способ, содержит базовую машину 1 с бульдозерным оборудованием, состоящим из отвала 2, гидроцилиндров 3 подъема и опускания отвала. Толкающие брусья 4 крепятся обычным образом к базовой машине 1 и отвалу 2. Перекос отвала в вертикальной поперечной плоскости предусмотрен при помощи гидрораскоса 5. По бортам базовой машины 1 установлены специальные измерители 6 и 7 действительных скоростей левого /дл и правого /дп бортов. Эти измерители могут быть совмещены с измерителями ускорений - акселерометрами. К измерителям б и 7 подсоединены элементы 8 и 9, которые вычисляют ускорение правого и левого AVAH. ДУ,
бортов ап
ат
:ап
л-хм ы
в единицу
времени. К элементам, определяющим ускорение бортов подсоединен элемент 10, вычисляющий среднее ускорение бульдозера
аср 2- К элементу 10 подсоединен
логический элемент 11, проверяющий, достигнуто ли критическое отрицательное ускорение бульдозера ( в случае внезапного удара бульдозера в непреодолимое препятствие). В случае достижения критического ускорения акр, сигнал идет на элементы отключения трансмиссии. Удар бульдозера о жесткое препятсвие происходит без сил инерции вращающихся частей двигателя, и трансмиссии. Динамический удар при этом снижается и надежность бульдозера повышается. Если критическое ускорение а«р не достигнуто, то сигнал подается на логический элемент 12, который сравнивает ускорение акр с минимально возможным ускорением amincp (acpmin 0). Уменьшение ускорения ниже указанной величины сказывается на точности перемещения машины. Если условие аср ammcp выполняется, то сигнал подается на логический элемент 13, определяющий идет ли подъем отвала. Если происходит подъем отвала, то сигнал подается на логический элемент 14, который проверяет, достигнута ли максимальная интенсивность подъема отвала (скорость подъема отвала), VH max. Если VH max и аср amincp. то сигнал подается на устройство 15, которое отключает работу двигатеяя и всех систем и вызывает машиниста, т.е. либо ограничение по amincp выбрано жестким, либо внешние грунтовые условия не позволяют производить бульдозерные работы (работа на склоне с большим углом
наклона). Если условие V4n max не выполняется, то Сигнал идет на исполнительное устройство 16, увеличивающее интенсивность (скорость) подъема отвала VHnf. В случае,, если элемент 13 показал, что идет 5 опускание отвала, то подается сигнал на исполнительное устройство 17, которое снижает интенсивность опускания отвала (скорость опускания отвала) VH°nJ до тех пор, пока не будет выполняться условие
0 acp amincp. Если условие аср атахср выполняется, то сигнал, подается на логическое устройство 19, которое сравнивает среднее ускорение аср с максимально возможным
5 средним ускорением аср атахср. Если аср атахср, то интенсивность воздействия на механизм подъема и опускания отвала, скорость подъема отвала, остается неизменной - элемент 18 - VH const. Если
0 условие. эср Этэхср не выполняется, т.е. возможен занос бульдозера при таких ускорениях, что отрицательно сказывается на точности передвижения бульдозера и его производительности, то сигнал идет на ло5 гическое устройство 20, определяющее, идет ли подъем отвала (устройства 13 и 20 могут быть совмещены). Если идет подъем отвала, то сигнал подается на исполнительное устройство 21, снижающее интенсив0 ность (скорость) подъема отвала VHnf. Если по данным элемента 20 идет опускание отвала, то сигнал подается на логическое устройство 22, проверяющее, достигнута ли максимально возможная скорость опуска5 ния отвала VH°. Если достигнута, т.е. скорость VH° max и аср атахср, то сигнал от устройства 22 подается на устройство 15, если максимальная скорость опускания отвала не достигнута, то сигнал подается на
0 исполнительное устройство 23, увеличивающее скорость опускания отвала (интенсивность воздействия на механизм подъема и опускания отвала) VH°f.
К элементу 9, определяющему ускоре5 ние правого борта, подсоединен логический
элемент 24. определяющий, достигнуто ли
максимально возможное ускорение правого
борта ап 3тахп. Если не достигнуто, то сиг. нал идет на логический элемент 25, опреде0 ляющий, происходит ли перекос отвала вправо. Если перекос отвала происходит вправо, то сигнал подается на исполнительное устройство 26, снижающее интенсивность воздействия на механизм
5 стабилизации скоростей бортов /г4((жоро- сть перекоса отвала). Если элемент 25 показал, что перекос отвала происходит влево, то сигнал подается на логический элемент 27, который определяет, достигнута ли максимальная интенсивность воздействия на
мт Тиизм стабилизации скоростей бортов (скорость перекоса отвала влево), если не достигнута, то сигнал подается на исполнительное устройство 28, увеличивающее скорость перекоса отвала влево. Если же скорость поворота отвала влево максимальна - перекоса отвала влево (по показаниям элемента 27), то сигнал идет на логический элемент 29, проверяющий, идет ли поворот бульдозера влево путем торможения левого борта машины. Если происходит поворот бульдозера влево, то сигнал подается на исполнительное устройство 30, снижающее скорость торможения левого борта, Если по показаниям элемента 29 происходит поворот вправо, то сигнал подается на логический элемент 31, проверяющий, достигнута ли максимальная интенсивность воздействия на механизм поворота вправо (скорость поворота). Если максимальная скорость поворота вправо не достигнута, то сигнал подается на исполнительное устройство 32, увеличивающее интенсивность (скорость) воздействия на механизм поворота, что приведет к увеличению скорости поворота вправо. Если максимальная интенсивность воздействия на механизм компенсации скоростей бортов достигнута, то сигнал идет на устройство 15, отключающее все системы машины и вызывающее механика.
Если логический элемент 24 показал, что условие ап Отзх выполняется, то сигнал подается на логический элемент 33, проверяющий, выполняется ли условие Эп аттп т.е. больше ли ускорение правого борта минимально возможного ускорения (an 3ттп). Если условие ап Эттп выполняется, то интенсивность (скорость) воздействия на механизм стабилизации скоростей бортов (перекос и механизм поворота базовой машины) остается неизменной - элемент 34. Если условие an ammn не выполняется, т.е. ускорение правого борта меньше допустимо возможного, то сигнал подается на логический элемент 35, проверяющий, в какую сторону идет перекос отвала. Если перекос идет вправо, то сигнал идет на исполнительное устройство 36, снижающее интенсивность (скорость) воздействия на механизм перекоса отвала (расход в гидросистеме гидрораскоса уменьшается). Если логический элемент 35 показал, что происходит перекос отвала влево, то сигнал подается на логический элемент 37, проверяющий, достигнута ли максимальная интенсивность (расход, скорость перемещения штока гидрораскоса) воздействия на механизм стабилизации скорости борта бульдозера - механизм перекашивания отвала. Если максимальная интенсивность не достигнута, то сигнал подается на исполнительное устройство 38, увеличивающее интенсивность (расход в гидросистеме питания гидрораскоса, скорость перемещения штока гидрораскоса) воздействия на ме- ханизм стабилизации скорости борта бульдозера. Если по данным логического элемента 37 достигнута максимальная интенсивность воздействия на механизм пе0 рекоса отвала, то сигнал подается на логический элемент 39, проверяющий в какую сторону происходит поворот бульдозе- р-а путем воздействия на механизм поворота базовой машины. В случае, если
5 бульдозер движется без включения механизмов поворота бортов и условие an aminn не выполняется, то сигнал с выхода да логического элемента 37 подается на устройство 15.
0 Если логический элемент 39 показал, что включен механизм поворота базовой машины вправо (тормозится правый борт), то сигнал подается на исполнительное устройство 40, снижающее интенсивность воздей5 ствия на механизм поворота базовой машины вправо. Если поворот по данным логического элемента 39 происходит влево, то сигнал от элемента 39 подается на логический элемент 41, проверяющий, достиг0 нута ли максимальная интенсивность воздействия на механизм поворота базовой машины влево. Если достигнута максимальная интенсивность воздействия на механизм поворота левого борта базовой
5 машины (торможение левого борта) УМпл max, то сигнал подается на устройство 15. Если максимальная интенсивность воздействия на механизм стабилизации скоростей бортов не достигнута, то сигнал
0 подается на исполнительное устройство 42, увеличивающее интенсивность воздействия на механизм поворота базовой машины влево.
Аналогичная система стабилизации ус5 корений левого борта (фиг.3). Порядок нумерации элементов тот же, что и на фиг.2.
Соответствие элементов и устройств фиг.2 и фиг.32 следующее , , , 46-27, , 48529, , ,
0 51-32, , , , 55-36, , ,58-39,,60-41,61-42.
Элементы 24 и 25, 33 и 35, 43 и 44, 52 и 54 имеют разъемы 62, которые отключают элементы, меняющие интенсивность воз5 действия на механизм перекоса отвала (гидрораскос 5). Эти разъемы отключаются при необходимости держать угол перекоса постоянным (при планировочных работах).
Бульдозер, на котором реализован данный способ, работает следующим образом.
При превышении среднего ускорения бульдозера аср критического аср акр. т.е. при ударе бульдозера в жесткое непреодолимое препятствие, логическим элементом 11 подается сигнал на отключение трансмиссии, и максимальные динамические нагрузки на бульдозер снижаются, что повышает надежность бульдозера. Если же логические элементы 12 и 19 показали, что среднее ускорение аСр находится в пределах amincp acp атах р, то интенсивность воздействия на механизм подъема и опускания отвала остается неизменной. При превышении максимально возможного предела среднего ускорения бульдозера аср атахср происходит снижение интенсивности воздействия на механизм подъема и опускания отвала (гидроцилиндры 3) при подъеме отвала 2 и увеличении интенсивности воздействия на механизм подъема и опускания отвала (путем увеличения расхода в гидросистеме гидроцилиндров 3 подъема и опускания отвала 2) при опускании отвала 2. Тем самым скорость отвала 2 в первом случае снижается и движение бульдозера тормозится путем упора отвалом 2 в призму грунта. Во втором случае - при опускании отвала 2, происходит увеличение скорости опускания отвала 2 и движение бульдозера также тормозится о призму волочения грунта перед отвалом. При невыполнении условия аср amincp интенсивность воздействия на механизм подъема и опускания отвала 2 увеличивается при подъеме отвала и бульдозер быстрее освобождается от призмы волочения грунта, ускорение стабилизируется. При опускании отвала 2 интенсивность воздействия на гидроцилиндры 5 подъема и опускания отвала уменьшается и бульдозер медленнее набирает призму волочения грунта, что также увеличивает ускорение бульдозера до выполнения условия аср amin
ср
Стабилизация ускорения бортов необходима, чтобы не было заносов бульдозера в сторону. При превышении максимально допустимого ускорения правого борта, фиг.2, или левого, фиг.З, происходит стабилизация ускорений бортов путем уменьшения скорости перекоса отвала при уменьшении ускорения одностороннего с перекосом борта, или увеличении скорости перекоса отвала в противоположную сторону. При увеличении ускорения борта больше допустимой величины происходит увеличе- нйе скорости перекоса при перекашивании в одностороннюю с бортом сторону и уменьшение скорости перекашивания при перекашивании отвала в противоположную
борту сторону, ускорение которого выше допустимого,
В случае, если максимальная скорость перекашивания отвала 2 достигнута (интен- 5 сивность воздействия на механизм перекашивания отвала максимальна) и если происходит еще и поворот с помощью механизма поворота базовой машины (или механизм перекоса отвала отключен при
0 планировочных работах), интенсивность воздействия на механизм поворота базовой машины (торможение) увеличивается, если ускорение борта больше допустимого и уменьшается, если ускорение борта больше
5 допустимого и уменьшается, если ускорение борта меньше допустимого. Если происходит только перекашивание отвала или повороте помощью механизма поворота базовой машины, и ускорение за счет перека0 шивани я отвала (поворот базовой машины) не стабилизировалось, то сигнал подается на устройство 15.
Преимущество изобретения состоит в увеличении точности перемещения бульдо5 зера, повышении его надежности, что приводит к увеличению производительности примерно на 10%. позволяет производить точные работы в местах, где присутствие человека не желательно (условия повышен0 ной температуры или радиации и т.п.).
Формула изобретения Способ автоматического управления работой бульдозера, включающий измере5 ние действительной скорости движения каждого борта, машины, определение отношения действительных скоростей левого и правого бортов, по результатам которого воздействие на механизм стабилизации
0 скоростей бортов, определение средней действительной скорости бортов и средней теоретической скорости бортов и вычисление величины среднего буксования и в зависимости от ее величины воздействие на
5 механизм подъема и опускания отвала, отличающийся тем, что, с целью увеличения производительности путем повышения точности поддержания заданного направления движения и повышения на0 дежности за счет снижения динамических нагрузок на рабочем органе и трансмиссии, определяют величину и знак действительных ускорений каждого, борта и в зависимости от их величины изменяют
5 интенсивность воздействия на механизм стабилизации скоростей бортов, при этом определяют среднее ускорение бортов и в зависимости от его величины изменяют ин- тенсивн-ость воздействия на механизм . подъема к опускания отвала, задают критнческоё ускорение и в случае, если отрица- ше критического, воздействуют на меха- тельное среднее значение ускорения боль- низм отключения трансмиссии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления работой бульдозера | 1985 |
|
SU1265259A1 |
| Способ автоматического управления рабочим органом землеройной машины | 1990 |
|
SU1776732A1 |
| БУЛЬДОЗЕР | 1996 |
|
RU2112837C1 |
| БУЛЬДОЗЕР | 2009 |
|
RU2403345C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| Бульдозер | 1985 |
|
SU1361256A1 |
| Гидропривод бульдозера | 1984 |
|
SU1234540A1 |
| Бульдозер | 1983 |
|
SU1155686A1 |
| Бульдозер | 1989 |
|
SU1716000A1 |
| Бульдозер | 1984 |
|
SU1245661A1 |
Изобретение относится к землеройно- транспортным машинам, в частности бульдозерам. Цель изобретения - увеличение производительности путем повышения точности поддержания заданного направления движения и повышение надежности за счет снижения динамических нагрузок на рабочем органе и трансмиссии. Для этого измеряют действительную скорость движения каждого борта машины, определяют отношение действительных скоростей левого и правого бортов, по результатам которого воздействуют на механизм стабилизации скоростей бортов, определяют среднюю действительную скорость бортов и среднюю теоретическую скорость бортов, по которым вычисляют величину среднего буксования, и в зависимости от ее величины воздействуют на механизм подъема и опускания отвала, определяют величину и знак действительных ускорений каждого борта и в зависимости от их величины измеряют интенсивность воздействия на механизм стабилизации скоростей бортов, при этом определяют среднее ускорение бортов и в зависимости от этой величины измеряютин- тенсивность воздействия на механизм подъема и опускания отвала и, если отрицательное среднее значение ускорения больше критического, воздействуют на механизм отключения трансмиссии. 3 ил. k/i Р
7W
| Способ автоматического управления работой бульдозера | 1985 |
|
SU1265259A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
