Изобретение относится к землеройнотранспортным машинам, а именно к бульдозерам.
Цель изобретения - поддержание заданного направления движения бульдозера.
Способ заключается в том, что при поддержании буксования в заданных пределах путем подъема отвала при превышении верхнего заданного уровня буксования и опускания при снижении буксования ниже заданного уровня по сигналу, полученному в результате сравнения действительной скорости движения машины, замеряемой измерителем скорости, и теоретической скорости, замеряемой по оборотам ведуш,ей звездочки или связанного с ней элемента трансмиссии, измеряют действительную скорость движения каждого борта машины, определяют отношение действительных скоростей левого и правого бортов машины, по результатам которого воздействуют на механизм стабилизации скоростей бортов. При этом для поддержания оптимальной тяги определяют среднюю действительную и среднюю теоретическую скорости бортов, по которым вычисляют величину среднего буксования и в зависимости от ее значения воздействуют на механизм подъема и опускания отвала.
На фиг. 1 изображено устройство, реализующее предлагаемый способ, вид сбоку; на фиг. 2 - то же, вид сверху.
Устройство содержит базовую машину с бульдозерным оборудованием, состоящим из отвала 2, гидроцилиндров 3 подъема и опускания отвала толкающие брусья 4 Перекос отвала в вертикальной поперечной плоскости предусмотрен при помощи гидроподкоса 5.
Базовая машина 1 содержит ведущие правую 6 и левую 7 звездочки, к которым подсоединены элементы 8 и 9 (тахометры), замеряющие их скорость вращения. Элементы 8 и 9 отпарированы в скоростях движения гусениц. По бортам базовой машины установлены специальные измерители 10 и 11 действительных скоростей каждого борта Удл.Удп. К измерителям 10 и 11 подсоединен элемент 12 (фиг. 1), вычисляющий
среднюю Удср действительную ско
рость базовой машины. Элемент 13 подсоединен к элементам 8 и 9 и вычисляет теоретическую скорость базовой машины
Ут.п + Утп
VT.CP
к элементам 12 и 13 подсоединен элемент 14, который вычисляет среднее буксирование
б (1 -тг)- К элементу 14 подсоединен
логический элемент 15, сравнивающий среднее буксование с заранее заданным минимальным значением бмнн. К элементу 15 подсоединен логический элемент 16, который производит проверку полностью ли опущен отвал Н Н;4и„. Элемент 15 соединен также с логическим элементом 17, сравнивающим значение среднего буксования бср с заранее заданным максимальным его значением биакс. К элементу 17 подсоединен логический элемент 18, проверяющий полностью ли поднят отвал Н Ниаие. Элемент 17 соединен с элементом 19, который дает сигнал на продолжение движения при неизменной высоте подъема отвала H const. Элементы 16 и 18 подсоединены к элементу 20, функциями которого являются остановка бульдозера и вызов механика. Элемент 16 соединен с золотником управления гидроцилиндрами 3 подъема и опускания отвала 2, причем он может подать команду только на опускание отвала 2. Элемент 18 также соединен с золотником управления гидроцилиндрами 3
0 подъема и опускания отвала, причем он может подать команду только на подъем отвала 2.
Измерители 10 и 11 действительных скоростей соединены также с элементом 21 (фиг. 2), который вычисляет их отношение
5у
К Элемент 21 соединен с логическим
Удп
элементом 22, который производит сравнение К с заранее заданным и минимально возможным значением К«и. Элемент 22 с оединен
0 с логическим элементом 23, который производит сравнение К с заранее заданным максимальным значением Kjiaxc- К элементу 23 подсоединен элемент 24, выдающий команду на продолжение движения без изменений. К элементу 22 подсоединен элемент 25, про5 веряющий полностью ли выдвинут шток гидрораскоса 5, т.е. максимально ли вправо перекошен отвал оСпр оСJJi c К элементу 25 подсоединен логический элемент 26, проверяющий полностью ли остановлена звездочка
Q 6 механизмом 27 поворота правой стороны базовой машины 1 МП11р макс.
Логический элемент 28 соединен с элементом 23 и проверяет полностью ли втянут шток гидрораскоса 5, т.е. достигнут ли максимальный угол перекоса отвала влево
5 (дев . К элементу 28 подсоединен элемент 29, проверяющий полностью ли остановлена звездочка 7 механизмом 30 поворота левой стороны базовой машины 1 МПлев макс. Элементы 22 и 25 соединены с по... мощью разъемного соединения 31, а элементы 23 и 28 - с помощью разъемного соединения 32. Элемент 22 отсоединен от элемента 26 с помощью разъемного соединения 33, а элемент 23 от элемента 29 - разъемного соединения 34. Элементы 28 и 25 сое5 динены с золотником управления гидроподкосом 5. Причем элемент 28 может подавать управляющий сигнал на золотник, перекашивать отвал влево, а элемент 25 - перекашивать отвал вправо. На гидроцилиндрах 3 подъёма и опускания отвала и гидроподкоса установлены датчики конечных положений, которые выдают сигналы Нмакс, Н«нн,
«tftлрДВ
ССмакс И СХмакс,
Бульдозер, на котором реализован предлагаемый способ, работает следующим образом.
При движении вперед с разработкой грунта элементы 8 и 9 постоянно измеряют теоретическую скорость каждого из бортов базовой машины, а измерители 10 и 11 - действительную скорость каждого борта базовой машины. По этим данным элементами 12 и 13 вычисляют средние скорости: действительную Удср и среднюю теоретическую VTCP, по которым далее элементтом 14 вычисляют среднее буксование бср. Затем среднее буксование бср сравнивают с минимальным заранее заданным значением буксования бмин элементом 15. Если ;бмин, сигнал подается на элемент 16, кото„
рыи производит проверку полностью ли опущен отвал. Крайнее нижнее положение отвала контролируется датчиком конечного положения.
Если в крайнем нижнем положении отвала условие бср сбмин не выполняется, сигнал подается на элемент 20, который дает сигнал на остановку бульдозера и вызов машиниста. Если же элемент 16 показывает, что отвал находится не в крайнем нижнем положении, то сигнал «Опускание подается на золотник управления гидроцилиндрами 3. Опускание отвала происходит до того момента, когда условие не будет выполняться. После этого сигнал подается на логический элемент 17, который сравнивает среднее буксование с максимальным заранее заданным значением буксования бмакс.
Если условие бср бмакс выполняется, сигнал подается на логический элемент 18, который проверяет полностью ли поднят отвал по показаниям конечных датчиков. Если условие Н выполнено, т.е. отвал находится в крайнем верхнем положении, и условие бср; 6«акс выполняется, то идет команда на элемент 20 на остановку бульдозера и вызов машиниста. Если условие Н Нмакс не выполняется, сигнал «Подъем подается на золотник управления гидроцилиндрами 3 подъема и опускания отвала. Если же условие не выполняется высота подъема отвала остается неизменной и бульдозер движется с буксованием ,5овь в пределах, соответствуюш.их оптимальному тяговому усилию базовой машины. Таким образом осуществляется поддержание оптимального тягового усилия, соответствующего максимальной производительности.
Для того, чтобы бульдозер сохранил заданное направление движения, измеренные специальными измерителями 10 и 11 величины действительных скоростей каждого борта Удл, Удп подаются на элемент 21, который
вычисляет отношение К тг. С элемента
Удп
21 сигнал подается на логический элемент 22, который сравнивает К с минимально возможным К„яи . Если условие КЖминне выполняется, т.е. отношение действительных скоростей бортов меньше допустимого (происходит отклонение бульдозера влево от заданного направления движения), сигнал подается на элемент 25, который проверяет полностью ли перекошен отвал 2 вправо. Если полностью (о чем свидетельствуют показания конечных датчиков, установленных на гидроподкосе 5), подается сигнал на элемент 26, который определяет полностью ли остановлена звездочка 6, механизмом поворота правого борта, если полностью, то сигнал подается на элемент 20 (остановка бульдозера и вызов механика). Если же условие МП ар макс в элементе 26 не выполняется, идет сигнал на остановку звездочки 6 механизмом 27 поворота правого борта до тех пор, пока не будет выполняться условие в элементе 22 . Если элемент 25 показал, что угол перекоса отвала выбран не полностью, подается сигнал на золотник гидроподкоса 5 на втягивание штока, при этом происходит перекос отвала влево до выполнения условия .
После того, как элемент 22 показал, что условие К -Кмин выполняется, сигнал подается на элемент 23, проверяющий условие К Кма1сс. Если это условие выполняется, то далее сигнал идет на элемент 24, который устанавливает угол перекоса отвала и положение механизмов 27, и поворота 30 постоянными. Если условия К Кмзкс не выполняется, сигнал подается на элемент 28, который определяет полностью ли перекошен отвал влево по показаниям конечных датчиков. Если отвал перекошен не полностью, сигнал далее идет на золотник гидроподкоса 5. Золотник гидроподкоса 5 занимает то положение, когда шток гидроподкоса втягивается, т.е. происходит перекос отвала влево до тех пор, пока не будет выполняться условие К ;Кмакс. Если и после полного перекоса отвала влево это условие не выполняется (о чем свидетельствует элемент 28), сигнал подается на элемент 29, который проверяет полностью ли остановлена звездочка 7 механизмом 30 поворота левого борта. Если полностью (МП.), сигнал подается на элемент 20 (остановка и вызов механика). Если не полностью, сигнал подается на затормаживание механизмом 30 поворота, звездочки 7 до выполнения условия .
Таким образом достигается выполнение условия Ки « СК ;Кмакс. Бульдозер сохраняет заданное направление движения.
Если достижение этого условия необходимо без использования гидроподкоса, например при планировке, то, отключив разъемные соединения 31 и 32 и подсоединив соединения 33 и 34, имеем то, что сигнал минует элементы 25 и 28, управляющие
перекосом отвала, и сохранение направления движения осуществляется при неизменном угле перекоса a const.
Преимущество предлагаемого способа состоит в том, что присутствие человека для контроля за работой бульдозера исключается,
при этом обеспечивается максимальное тяговое усилие, а следвательно, и производительность. Бульдозер, на котором реализован предлагаемый способ, может работать в условиях, где присутствие человека нежелательно.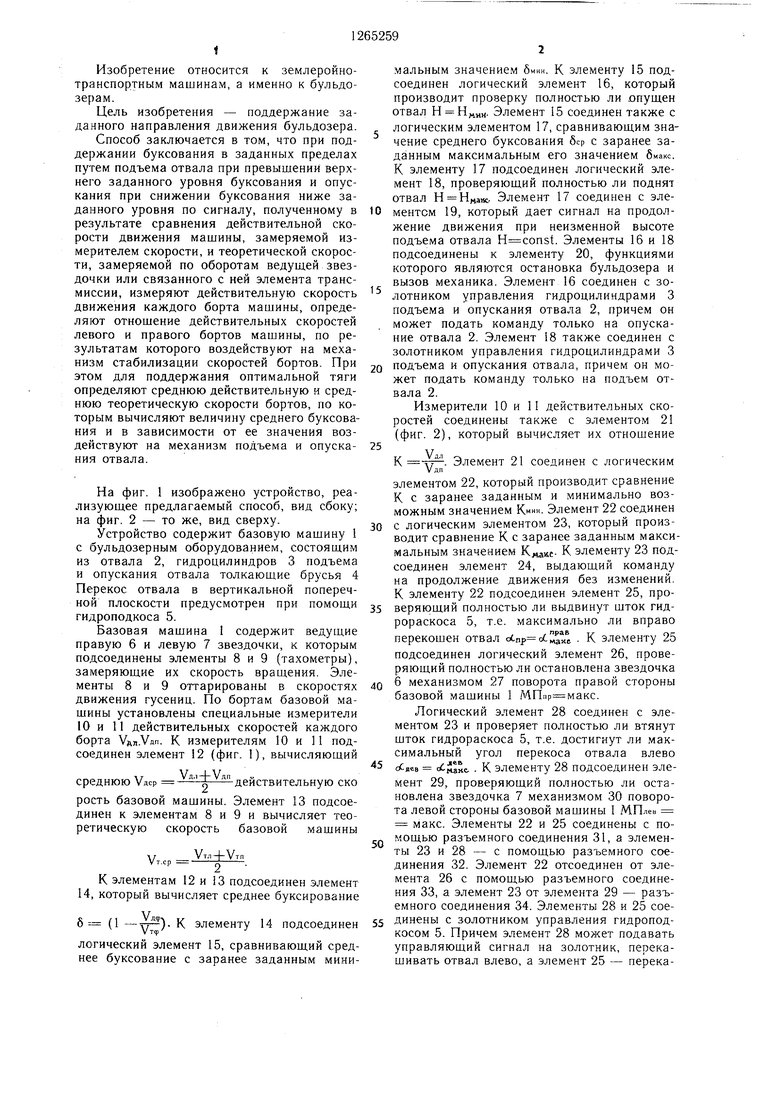
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления работой бульдозера | 1990 |
|
SU1810441A1 |
| Способ автоматического управления рабочим органом землеройной машины | 1990 |
|
SU1776732A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| Бульдозер | 1983 |
|
SU1268673A1 |
| Гидравлический привод управления отвалом бульдозера | 1978 |
|
SU785441A1 |
| Бульдозер | 1989 |
|
SU1819943A1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1991 |
|
SU1803505A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| Бульдозер | 1983 |
|
SU1155687A1 |
| БУЛЬДОЗЕР | 1991 |
|
RU2011752C1 |
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОТОЙ БУЛЬДОЗЕРА, заключающийся в поддержании буксования в заданных пределах путем подъема отвала при превышении верхнего заданного уровня буксования и опускания его при снижении буксования ниже заданного уровня по сигналу, полученному за счет сравнения действительной и теоретической скоростей движения бульдозера, отличающийся тем, что, с целью поддержания заданного направления движения бульдозера, измеряют действительные скорости движения каждого борта бульдозера, находят отношение этих сигналов и результируюш,им сигналом воздействуют на механизм стабилизации скоростей бортов.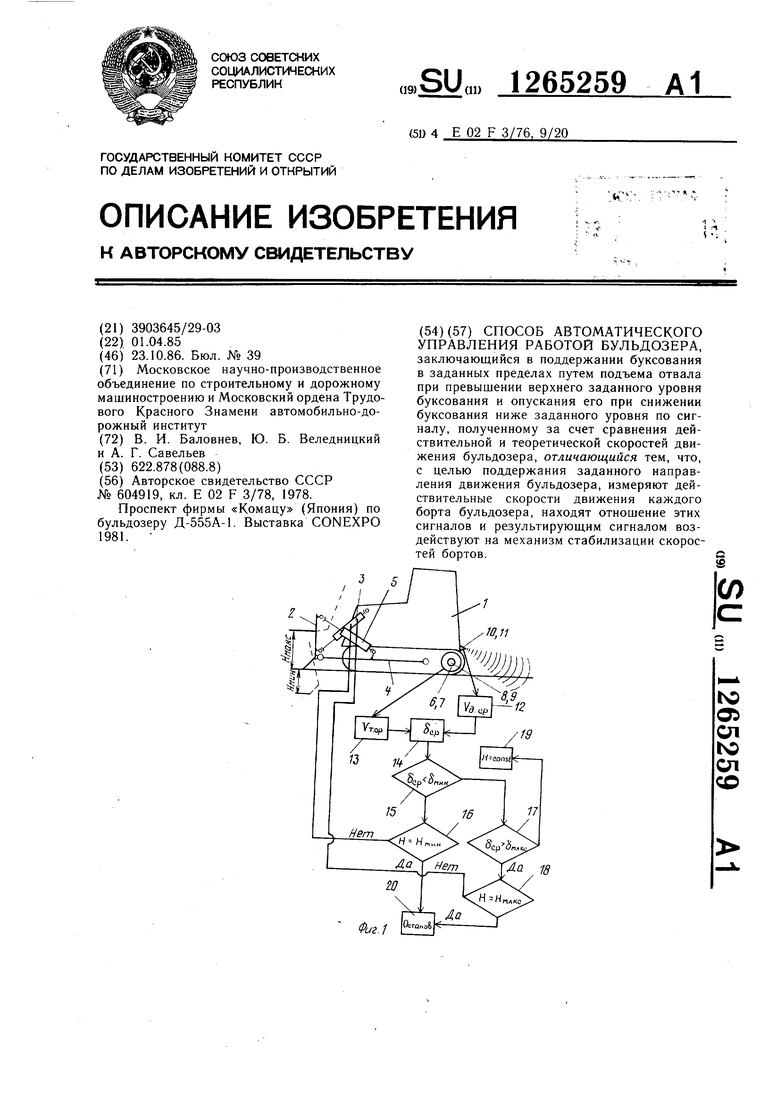
| Гидосистема управления рабочим органом бульдозера | 1976 |
|
SU604919A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кронциркуль | 1923 |
|
SU555A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
