Изобретение относится к антенной технике, в частности к конструкции подвесных устройств в виде дипольных и т.п. антенн, и может быть использовано для снятия характеристик поля антенн, установленных на возвышенных местах с направлением максимума диаграммы направленности сверху вниз, а также на любой другой поверхности с направлением максимума диаграммы направленности сверху вниз.
Целью изобретения является повышение точности измерений за счет разнесения зондов при снятии характеристик поля антенны с вертикальной и горизонтальной поляризацией и за счет устранения колебаний зонда от паразитного момента.
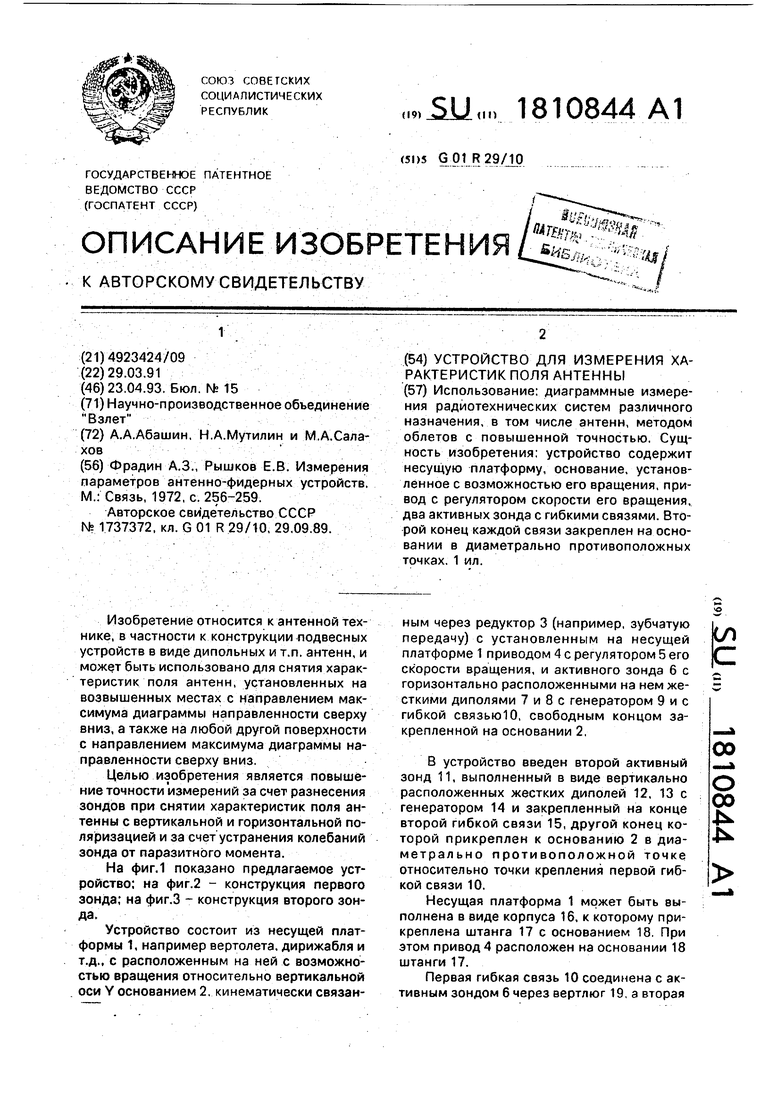
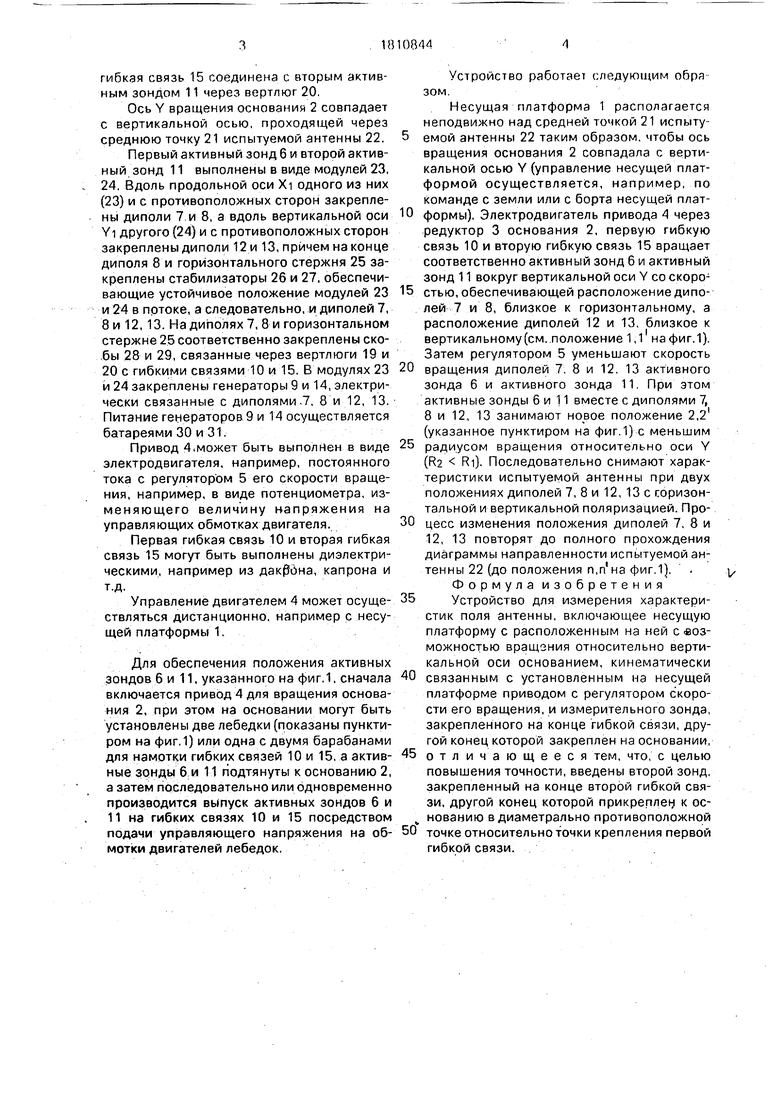
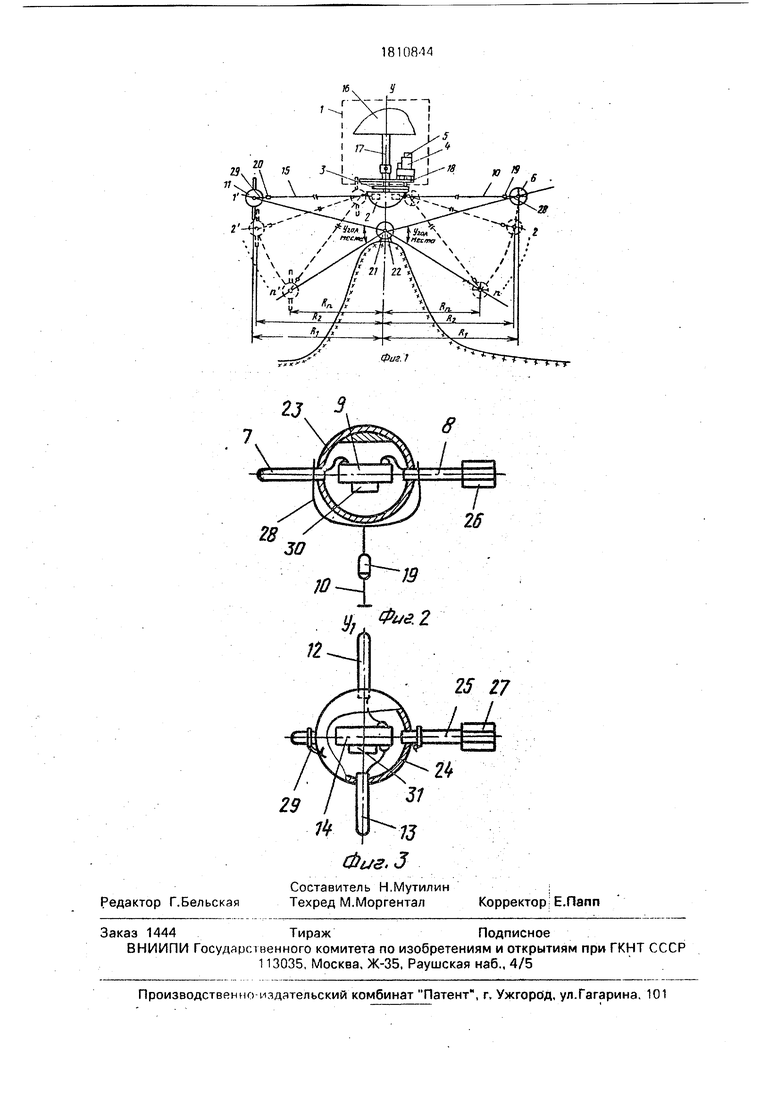
На фиг.1 показано предлагаемое устройство; на фиг.2 - конструкция первого зонда; на фиг.З - конструкция второго зонда.
Устройство состоит из несущей платформы 1, например вертолета, дирижабля и т.д., с расположенным на ней с возможностью вращения относительно вертикальной оси Y основанием 2. кинематически связанным через редуктор 3 (например, зубчатую передачу) с установленным на несущей платформе 1 приводом 4 с регулятором 5 его скорости вращения, и активного зонда 6 с горизонтально расположенными на нем жесткими диполями 7 и 8 с генератором 9 и с гибкой связьюЮ, свободным концом закрепленной на основании 2,
В устройство введен второй активный зонд 11, выполненный в виде вертикально расположенных жестких диполей 12, 13 с генератором 14 и закрепленный на конце второй гибкой связи 15, другой конец которой прикреплен к основанию 2 в диаметрально противоположной точке относительно точки крепления первой гибкой связи 10.
Несущая платформа 1 может быть выполнена в виде корпуса 16, к которому прикреплена штанга 17 с основанием 18. При этом привод 4 расположен на основании 18 штанги 17.
Первая гибкая связь 10 соединена с активным зондом 6 через вертлюг 19, а вторая
СП
с
00
д
о
00
-N
гибкая связь 15 соединена с вторым активным зондом 11 через вертлюг 20.
Ось Y вращения основания 2 совпадает с вертикальной осью, проходящей через среднюю точку 21 испытуемой антенны 22.
Первый активный зонд б и второй активный зонд 11 выполнены в виде модулей 23, 24. Вдоль продольной оси Xi одного из них (23) и с противоположных сторон закреплены диполи 7.и 8, а вдоль вертикальной оси YI другого (24) и с противоположных сторон закреплены диполи 1.2 и 13, причем на конце диполя 8 и горизонтального стержня 25 закреплены стабилизаторы 26 и 27, обеспечивающие устойчивое положение модулей 23 и 24 в потоке, а следовательно, и диполей 7, 8 и 12, 13. На диполях 7, 8 и горизонтальном стержне 25 соответственно закреплены скобы 28 и 29, связанные через вертлюги 19 и 20 с гибкими связями 10 и 15. В модулях 23 и 24 закреплены генераторы 9 и 14, электрически связанные с диполями .7, 8 и 12, 13. Питание генераторов 9 и 14 осуществляется батареями 30 и 31.
Привод 4.может быть выполнен в виде электродвигателя, например, постоянного тока с регулятором 5 его скорости вращения, например, в виде потенциометра, изменяющего величину напряжения на управляющих обмотках двигателя.
Первая гибкая связь 10 и вторая гибкая связь 15 могут быть выполнены диэлектрическими, например из дакрона, капрона и т.д.
Управление двигателем 4 может осуществляться дистанционно, например с несущей платформы 1.
Для обеспечения положения активных зондов 6 и 11, указанного на фиг. 1, сначала включается привод 4 для вращения основания 2, при этом на основании могут быть установлены две лебедки (показаны пунктиром на фиг.1) или одна с двумя барабанами для намотки гибких связей 10 и 15, а активные ЗРНДЫ 6:и 11 подтянуты к основанию 2, а затем последовательно или одновременно производится выпуск активных зондов 6 и 11 на гибких связях 10 и 15 посредством подачи управляющего напряжения на об- мотки двигателей лебедок.
.
Устройство работает следующим обра
Несущая платформа 1 располагается неподвижно над средней точкой 21 испытуемой антенны 22 таким образом, чтобы ось вращения основания 2 совпадала с вертикальной осью Y (управление несущей платформой осуществляется, например, по команде с земли или с борта несущей платформы), Электродвигатель привода 4 через редуктор 3 основания 2, первую гибкую связь 10 и вторую гибкую связь 15 вращает соответственно активный зонд 6 и активный зонд 11 вокруг вертикальной оси У со скоростью, обеспечивающей расположение диполей 7 и 8, близкое к горизонтальному, а расположение диполей 12 и 13, близкое к вертикальному(см..положение 1,1 на фиг.1). Затем регулятором 5 уменьшают скорость
вращения диполей 7. 8 и 12. 13 активного зонда 6 и активного зонда 11. При этом активные зонды б и 11 вместе с диполями 7, 8 и 12, 13 занимают новое положение 2,2 (указанное пунктиром на фиг.1) с меньшим
радиусом вращения относительно оси Y (Ra RI). Последовательно снимают характеристики испытуемой антенны при двух положениях диполей 7, 8 и 12, 13 с горизонтальной и вертикальной поляризацией. Процесс изменения положения диполей 7, 8 и 12, 13 повторят до полного прохождения диаграммы направленности испытуемой антенны 22 (до положения п,п на фиг.1). . Формулаизобретения
Устройство для измерения характеристик поля антенны, включающее несущую платформу с расположенным на ней с -возможностью вращения относительно вертикальной оси основанием, кинематически
связанным с установленным на несущей платформе приводом с регулятором скорости его вращения, и измерительного зонда, закрепленного на конце гибкой связи, другой конец которой закреплен на основании,
отличающееся тем, что, с целью повышения точности, введены второй зонд, закрепленный на конце второй гибкой связи, другой конец которой прикреплен к ос- нованию в диаметрально противоположной
точке относительно точки крепления первой гибкой связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения характеристик поля антенны | 1989 |
|
SU1789942A1 |
| Устройство для измерения характеристик поля антенны | 1989 |
|
SU1737372A1 |
| Устройство для буксировки диполей антенной системы | 1986 |
|
SU1436398A1 |
| Устройство для буксировки гибких систем | 1987 |
|
SU1496165A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| УСТАНОВКА ДЛЯ БУРЕНИЯ СКВАЖИН | 1992 |
|
RU2011816C1 |
| ОБРАБОТКА АНИЗОТРОПИИ В ПОЛОГИХ СКВАЖИНАХ | 2013 |
|
RU2615219C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ПОЛЯ АНТЕННЫ | 1991 |
|
SU1841106A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| Устройство для буксировки антенной системы | 1987 |
|
SU1462666A1 |
Использование: диаграммные измерения радиотехнических систем различного назначения, в том числе антенн, методом облетов с повышенной точностью. Сущность изобретения: устройство содержит несущую платформу, основание, установленное с возможностью его вращения, привод с регулятором скорости его вращения, два активных зонда с гибкими связями. Второй конец каждой связи закреплен на основании в диаметрально противоположных точках. 1 ил.
Фиг.З
Редактор Г.Бельская Заказ 1444
Составитель Н.Мутилин Техред М.Моргентал
Корректор |Е.Папп
.....Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Корректор |Е.Папп
| Фрадин А.З., Рышков Е.В | |||
| Измерения параметров антенно-фидерных устройств | |||
| М.: Связь, 1972,с.256-259 | |||
| Устройство для измерения характеристик поля антенны | 1989 |
|
SU1737372A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
