ел G
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для буксировки гибких систем | 1987 |
|
SU1496165A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| Устройство стабилизации вертикального положения диполей антенной системы на летательном аппарате | 1987 |
|
SU1550797A1 |
| Устройство для уборки буксируемых тел | 1987 |
|
SU1459156A1 |
| Способ определения аэродинамических характеристик моделей и устройство для его осуществления | 1986 |
|
SU1462970A1 |
| Устройство для буксировки антенной системы | 1987 |
|
SU1462666A1 |
| Способ уборки полой гибкой системы и устройство для его реализации | 1987 |
|
SU1482365A1 |
| Способ определения аэродинамических характеристик тел и устройство для его осуществления | 1986 |
|
SU1462969A1 |
| Устройство для буксировки гибкой системы | 1987 |
|
SU1534920A1 |
| Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления | 1989 |
|
SU1781133A1 |
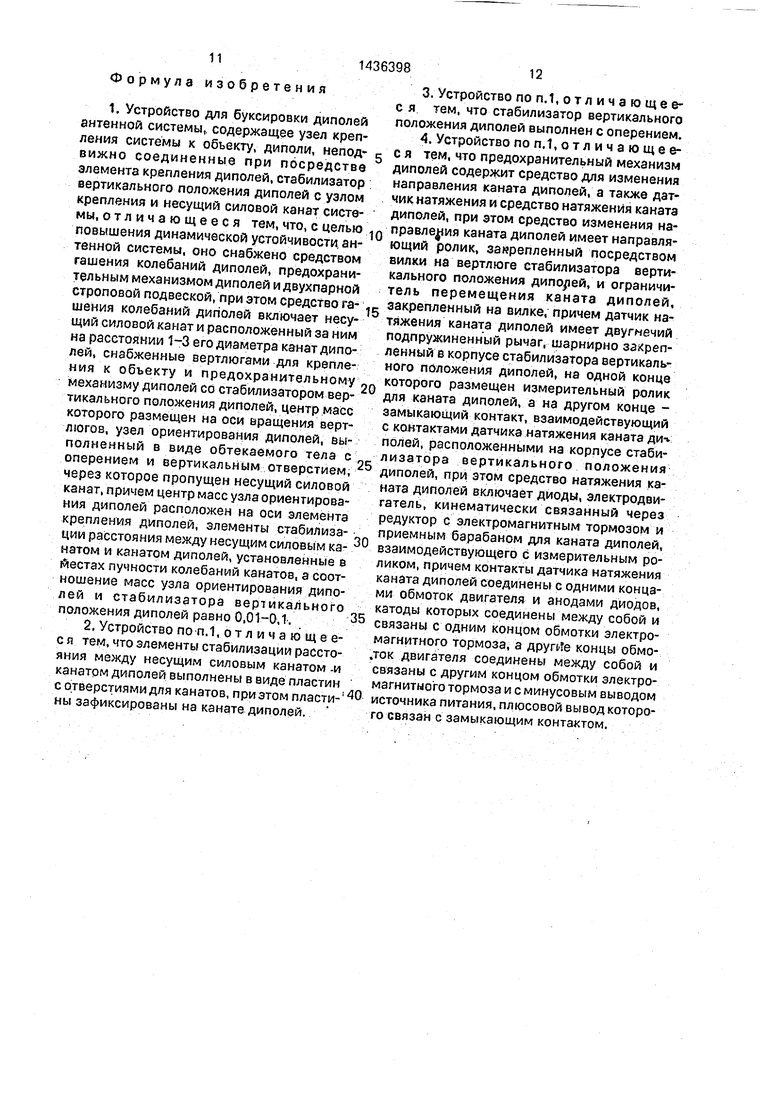
Изобретение относится к области авиационной и судостроительной техники, в частности к устройствам бусировки вертикально расположенных диполей антенных систем в различных средах. Целью изобетения является повышение динамической устойчивости антенной системы Устройство для буксировки диполей антенной сиаены включает ДЕМ- жущиися объект 1 со средством 2 крепления сис- темы, а также диполи 3 и 4, стабилизатор 6 вфтй- кального положения диполей и несущий «анат 8. Система снабжена узлом 14 ориент чювания дипо лей 3 и 4 и их канатов 12 и 13 по потоку, при этом канат 13 связан с предохранительным механизмом 10. При букс1фовке вертикаге но расположешых диполей 3 и 4 антенной сиаемы узел 14 ориентирования благодаря наличию оперения 41 уаанав- ливается в направлен)1 потока, а наличие вертлюгов 17 и 18 и стабилизатйра 6 вертикального тюло- жения диполей обеспечивает из заданное положение в лространстве. При этом элементы 15 и 16 стгбилизац1 расстояния между несущим канатом 8 стабишзатора 6 аертикапьногс положения диполей выполнены к вгще гшстйк одни стороны которых закреплены на диполях 3, 4, а через другие пропущен несущий канат 8. Изменение напряжения канатов 12 и 13 й обеспечеше их надежноаи достигаются за счет предохранительного механизма 10; Ззпф-лы,9ил.
гЖ. -,
а
4D
оо
Изобретение относится к области авиа- ц oннoй и судостроительной техники, в частности к устройствам буксировки вертикально расположенных диполей антенных систем в различных средах.
Целью изобретения является повышение динамической устойчивости антенной системы.
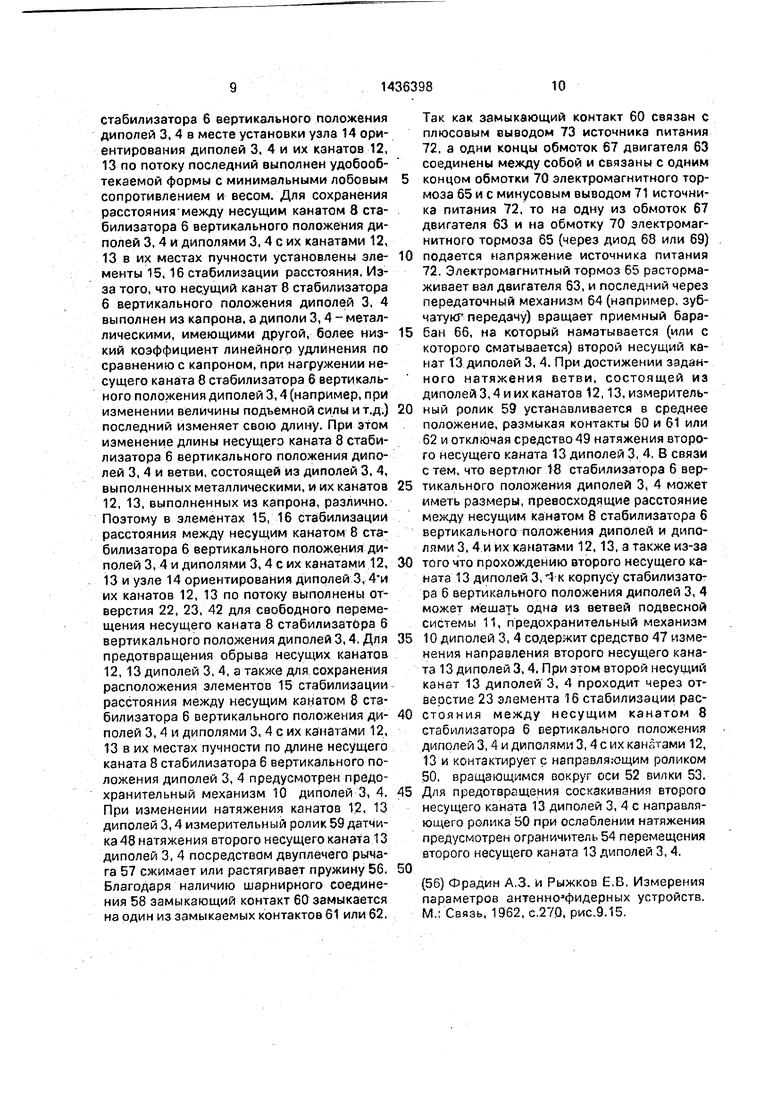
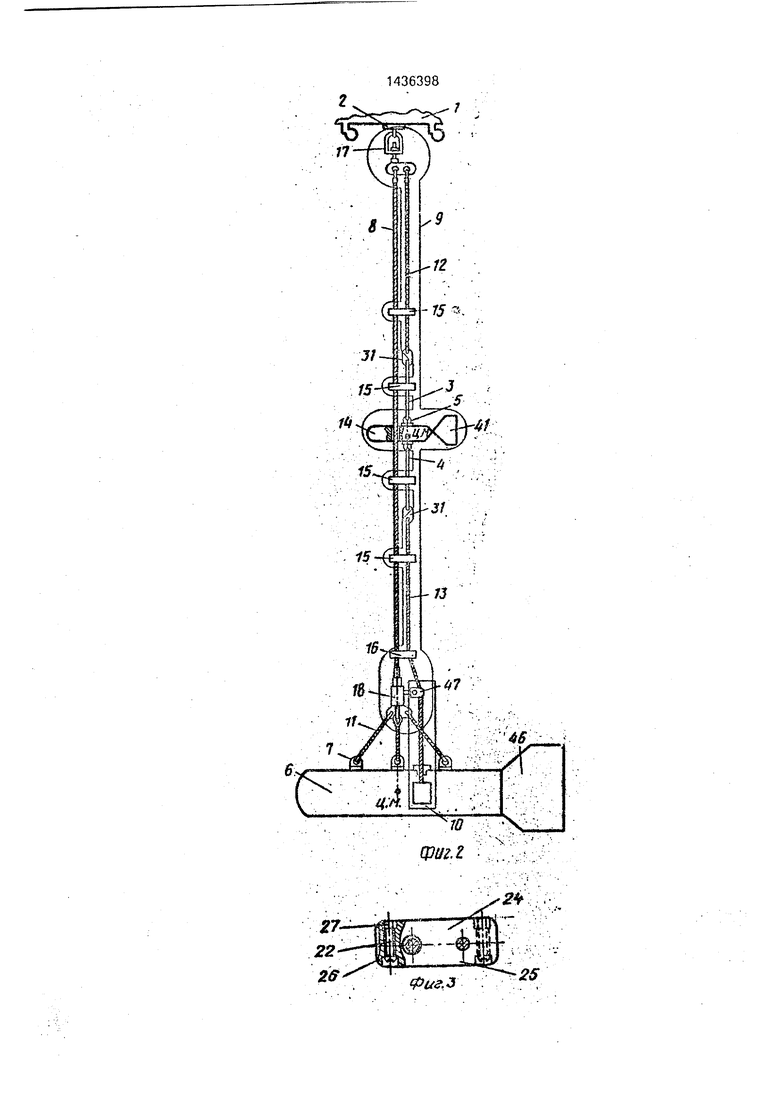
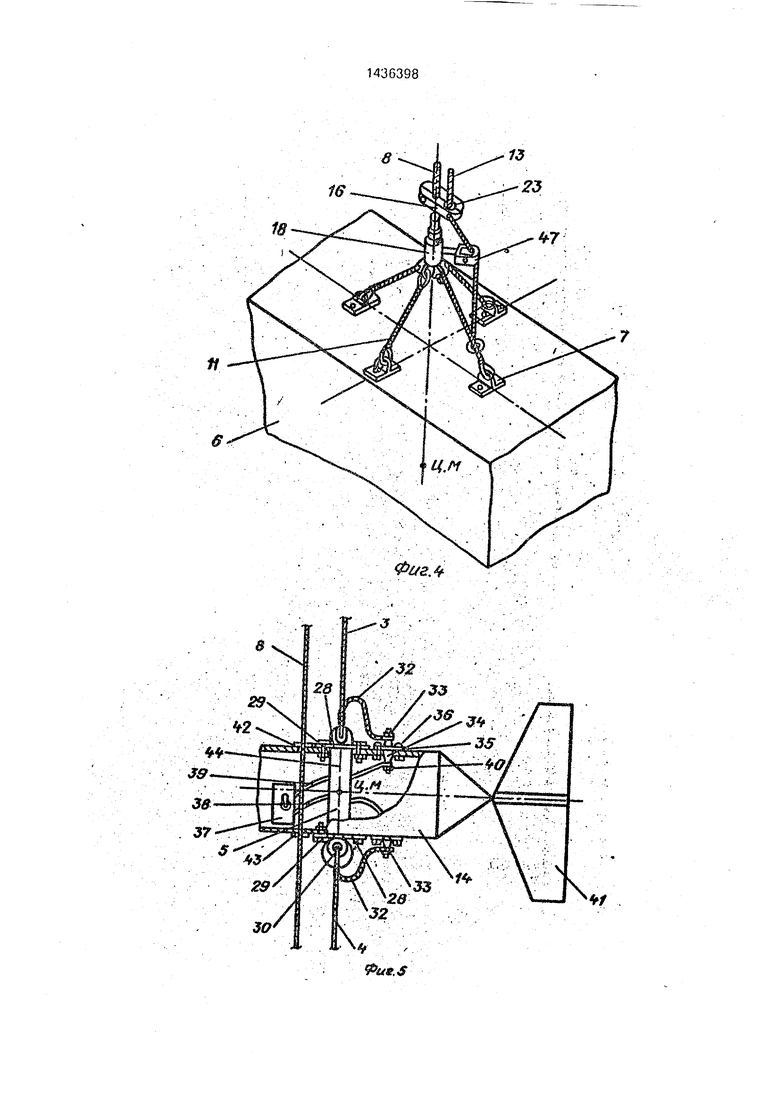
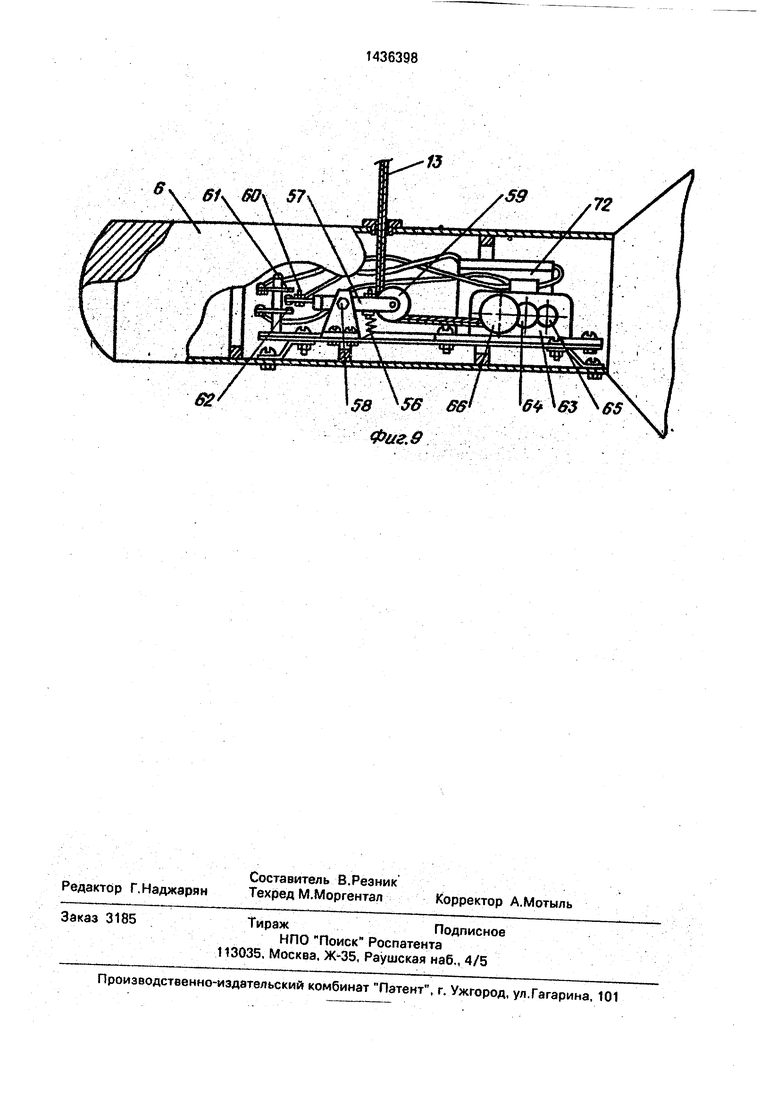
На фиг.1 показано устройство с летательным апл аратом; на фиг.2 - средство га- шения колебаний; на фиг.З - конструкция злемента стйбилизации расстояния между несущим канатом стабилизатора вертикального положения диполей и диполями с их канатами; на фиг.4- конструкция крепления несущего каната стабилизатора вертикального положения диполей и второго Hecyaie- го каната диполей к стабилизатору вертикального положения диполей; на фмг.5 - конструкция узла ориентирования диполей и их канатов по потоку; на фиг.б - средство изменения направления второго несущего.каната; на фиг. - предохранительный механизм; на фиг.З - то же, конструктивная схема; на фиг,9 - размещение узлов предохранительного м1еханизма диполей на стабилизаторе вертикального положения диполей.
Устройст130 для буксировки диполей антенной системы включает движущийся обь- акт 1 со средством 2 крепления системы, расположенным снизу движущегося объекта 1, диполи 3, 4, одни концы которых соединены посредством злемента 5 крепления диполей 3, 4, стабилизатор 6 вертикального .положения диполей 3. 4 с узлом 7 крепления и несущий канат 8 стабилизатора 6 вертикального положения диполей 3, 4.
Устройство снабжено средством 9 гашения колебаний диполей 3,4, предохрани- тельным механизмом tO диполей 3, 4 и двухпарной подвесной системой 11. Причем средство 9 гашения колебаний диполей 3, 4 имеет несущие канаты 12, 13 диполей 3, 4, узел 14 ориентирования диполей 3, 4 и их канатов 12, 13 по потоку, злементы 15, 16 стабилизации расстояния между несущим канатом 8 стабилизатора 6 вертикального положения диполей 3,4 и диполями 3,4 с их канатами 12, 13, вертлюги 17, 18 движуще- гося объекта 1 и стабилизатора 6 вертикального положения диполей 3, 4, при этом первый несущий канат 12 диполей 3, 4 связан через диполи 3, 4 с злементом 5 крепления диполей 3, 4, второй несущий канат 13 диполей 3. 4 связан с предохранительным механизмом 10 диполей 3, 4.
Движущийся объект 1 через средство 2 крепления соединен со скобой 19 вертлюга 17 движущегося объекта 1, его стержнем 20
и обухом 21. на конце которого закреплены несущий канат 8 стабилизатора 6 вертикального положения диполей 3,4 и первый несущий канат 12 диполей 3, 4, при зтом другой конец несущего каната 8 стабилизатора 6 вертикального положения диполей 3, 4 последовательно через вертлюг 18 стабилизатора 6 вертикального положения диполей 3, 4, двухпарную подвесную систему 11 и узел 7 крепления закреплен на стабилизаторе 6 вертикального положения диполей 3, 4, выполненном в виде обтекаемого тела.
Кроме того, элементы 15 стабилизации расстояния между несущим канатом 8 стабилизатора 6 вертикального положения диполей S, 4 и диполями 3, 4 с их канатами 12, 13 выполнены в виде пластин, одни стороны которых закреплены на диполях 3, 4с их канатами 12,13, а через отверстия 22 другой стороны пропущен несущий канат 8 стабилизатора 6 вертикального положения диполей 3, 4. Причем, одна из сторон злемента 16 стабилизации расстояния между несущим канатом 8 стабилизатора 6 вертикального положения диполей 3, 4 и диполями 3,
4с их канатами 12, 13 закреплена на несущем канате 8 стабилизатора 6 вертикального положения диполей 3, 4, над вертлюгом 18 стабилизатора 6 вертикального положения диполей 3, 4, а через отверстие 23 другой стороны пропущен второй несущий канат 13 диполей 3, 4.
Элементы 15, 16 стабилизации расстояния между несущим канатом 8 стабилизатора 6 вертикального положения диполей 3, 4 и диполями 3, 4 с их канатами 12, 13 могут быть выполнены, например, разрезными и состоящими из двух половин 24, 25, закреп- ленных посредством винтов 26 и гаек 27 на диполях 3, 4 и их канатах 12, 13 и несущем канате 8 стабилизатора 6 вертикального положения диполей 3, 4.
Узел 14 ориентирования диполей 3, 4,и их канатов 12, 13 по потоку закреплен на злементе 5 крепления диполей 3, 4 с по- мощью-разрезных силовых шайб 28 крепежного соединения 29, размещенных в выточках злемента 5 крепления диполей 3, 4, выполненного из дизлeктpичecюJГO материала, например из металлических канатов, концы которых заделываются на коуши 30, которые закрепляются на концах злемента
5крепления диполей 3,4с одной стороны и на фарфоровых изоляторах 31 с другой стороны.
На другой стороне фарфоровых изоляторов 31 закреплены концы первого и второго несущих канатов 12, 13 диполей 3, 4, также заделанных на коуш.
Отводы 32 от концов диполей 3, 4. закрепленных на элементе 5 крепления диполей 3, 4, крепятся посредством крепежного соединения 33, состоящего из шайб гаек, на проходных фарфоровых изоляторах 34. При этом проходные фарфоровые изоляторы 34 крепятся посредством разрезных шайб 35, размещенных в выточках проходных фарфоровых изоляторов 34. с помощью крепежного соединения 36, состоящего из болтов, гаек и шайб, на корпусе узла 14 ориентированных диполей 3,4 и их канатов 12, 13 по потоку. Внутри корпуса узла 14 ориентирования диполей 3, 4 и их канатов 12, 13 по потоку закреплен корпус 37 генератора с выводами 33, 39 для его подсоединения посредством крепежного соединения 40 к проходным фарфоровым изоляторам 34.
Узел 14 ориентирования диполей 3, 4 и их канатов 12, 13 по потоку выполнен с оперением 41, например, крестообразной формы с отверстиями 42 в носовой части, в которых установлены втулки 43, через которые пропущен несущий канат 8 стабилизатора б вертикального положения диполей 3, 4, При этом узел 14 ориентирования диполей 3,4 и их канатов 12,13 по потоку наряду с функцией ориентирования диполей 3, 4 и их канатов 12, 13 по потоку выполняет фун- кцию.стйбилизации расстояния между несущим канатом 8 стабилизатора 6 вертихального положения диполей 3, 4 и диполями 3, 4 с их канатами 12, 13.
Центр масс узла 14 ориентирования диполей 3, 4 и их канатов 12, 13 гю потоку расположен на оси 44 элемента 5 крепления диполей 3, 4, а центр масс стабилизатора 6 вертикального положения диполей 3, 4 размещен на оси 45 вращения вертлюга 18 стабилизатора 6 вертикального положения диполей 3, 4.
Диполи 3,4 и их канаты 12, 13 размещены за несущим канатом 8 стабилизатора 6 вертикального положения диполей 3, 4 на расстоянии, равном 1-3 диаметра несущего каната 8 стабилизатора 6 вертикального положения диполей 3, 4. При зтом элементы 15, 16 стабилизации расстояния между несущим канатом 8 стабилизатора вертикального положения диполей 3, 4 и диполями 3, 4 с их канатами 12, 13 размещены в местах пучности колебаний канатов 12, 13 и диполей 3, 4, а отношение массы узла 14 ориентирования диполей 3, 4 и их канатов 12, 13 по потоку к массе стабилизатора 6 вертикального положения диполей 3,4 находится в диапазоне 0,01-0,1.
Стабилизатор 6 вертикального.положения диполей 3, 4 выполнен с оперением 46.
Предохранительный механизм 10 диполей 3, 4 содержит средство 47 изменения направления второго несущего каната 13 диполей 3, 4, датчик 48 натяжения второго 5 несущэго каната диполей 3, 4, средство 49 натяжения второго несущего каната 13 диполей 3, 4. Средство 47 изменения направления второго несущего каната 13 диполей 3, 4 имеет направляющий ролик 50 с под0 шипником 51 на оси 52 вилки 53, подвижно закрепленной из вертлюге 18 стабилизатора 6 вертикального положения диполей 3,4, и ограничитель 54 перемещения второго не- сущегЪ каната 13 диполей 3, 4, закреплен5 ный на вилке 53. Ось 52 аилкиБЗ может быть выполнена, например, в виде болта, который совместно с гайкой 55 образует крепежное соедмнение для ограничителя 54 перемещения второго несущего каната 13
0 диполей 3,4. Крепление вилки 53 на вертлюге 18 стабилизатора 6 вертикального положения диполей 3, 4 может осуществляться, непример, посредством сварки и т.д.
Датчик 48 натяжений второго несущего
5 каната 13 диполей 3, 4 имеет двуплечий подпружиненный пружиной 56 рычаг 57, закрепленный посредством шарнирного соединенмя 58 в корпусе стабилизатора 6 вертикального положения диполей 3, 4. На
0 одном конце рьгчага 57 размещен измерительный ролик 59 для второго несущего каната 13 диполей 3, 4, на другом конце - контакт 60, размещенный между замыкаемыми контактами 61, 62, за5 крепленными в корпусе стабилизатора 6 вертикального положения диполей 3, 4.
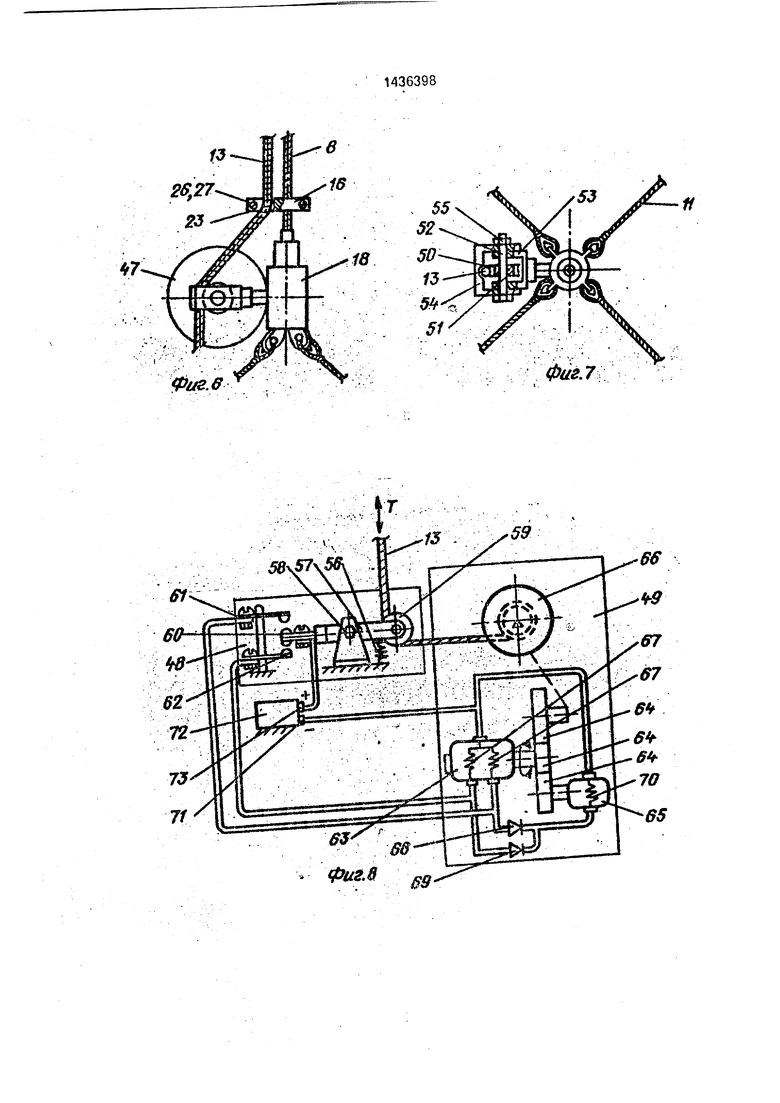
Средство 49 натяжения второго несущего каната 13 диполей 3, 4 имеет двигатель
0 63, например, постоянного тока, кинематически связанный через передаточный механизм 64 с злектромагнитным тормозом 6Б и приемным барабаном 66 с закрепленным на нем вторым несущим канатом 13 диполей 3,
5 -1. конташйрующим с измерительным роликом 59.
А замыкаемые контакты 61, 62 датчика 48 натяжения второго несущего каната 13 диполей 3, 4 соединены с одними концами
0 обмоток 67 двигателя 63 и акодзми диодов 68, 69, катоды которых соединены между собой и саязаны с одним концом обмотки 70 электромагнитного .тормоза 65, а другие концы обмоток 67 двигателя 63 соединены
5 между собой и связаны с другим концом обмотки 70 электромагнитного тормоза 65 и с минусовым выводом 71 источника питания 72, например, постоянного тока, плюсовой вывод 73 которого связан с замыкающим контактом 60.
8 качестве источника питания 72 может служить, например, аккумулятор,
В качестве средства 49 натяжения второго несущего каната 13 диполей 3.4 может быть использована электрическая лебедка с тормозом,
Второй несущий канат 13 диполей 3, 4 крепится к приемному барабану 66 легко- съемным наконечником или шариком, позволяющим производить замену каната при его износе в процессе эксплуатации.
Выполнение стабилизатора вертикального положения диполей и узла ориентирования диполей и их канатов по потоку в виде обтекаемого тела обеспечивает минималь- ное лобовое сопротивление и обуславливает минимальный отход канатов от вертикали в месте их установки с целью снижения вибраций.
Для обеспечения одинакового угла ата- ки по длине каната и минимальных его виб- раций необходимо, чтобы отношение массы к силе лобового сопротивления и стабилизатора вертикального положения диполей и узла ориентирования диполей и их канатов было одинаковым.
При размещении точки подвеса несущего каната стабилизатора вертикального положения диполей над центром масс стабилизатора вертикального положения диполей обеспечиваются минимальные вибрации несущего каната стабилизатора вертикального положения диполей за счет минимальных величин изменения углов атаки каната, а двухпарная система подвески , обеспечивает устойчивое движение груза в рабочем диапазоне скоростей,
Для уменьшения вибраций и предотвращения обрыва каната используется предохранительный механизм диполей,
При растяжении несущего каната стабилизатора вертикального положения диполей (например, при изменении подъемной силы и т.д.) одновременно с ним растягивается ветвь, состояа1ая из несущих канатов диполей и диполей. При превышении заданного натяжения ветви под действием предохранительного механизма диполей элементы стабилизации расстояния между несущим канатом стабилизатора вертикаль- ного положения диполей и диполями с их канатами, закрепленные на диполях и их канатах, перемещаются вдоль несущего ка- иата стабилизатора вертикального положения диполей, сохраняя свое положение по его длине от движущегося объекта.
Предохранительный механизм диполей выполняет функцию защиты диполей и их канатов от обрыва при растяжении несущего каната под действием переменных нагрузок при буксировке, взлете и посадке.
Устройство работает следующим образом.
При буксировке диполей 3, 4 движущимся объектом 1 узел 14 ориентирования диполей 3, 4 и их канатов 12, 13 по потоку средства 9 гашения колебаний диполей 3,4, закрепленный на элементе 5 крепления диполей 3, 4, и благодаря выполнению его с оперением 41 устанавливается по направлению вектора набегающего воздушного потока. При этом ветвь, состоящую из диполей 3,4 и их канатов 12,13 действует момент от узла 14 ориентирования диполей 3,4 и их канатов 12, 13 по потоку вокруг несущего каната 8 стабилизатора 6 вертикального положения диполей 3, 4. Благодаря наличию вертлюгов 17, 18 движущегося объекта 1 и стабилизатора 6 вертикального положения диполей 3, 4 последние и их канаты 12, 13 поворачиваются вокруг несущего каната 8 стабилизатора б вертикального положения диполей 3, 4 и устанавливаются за ним по направлению вектора набегающего воздушного потока. Причем поворот первого несущего каната 12 диполей 3, 4 осуществляется благодаря повороту стержня 20 с обухом 21 в скобе 19 вертлюга 17 движущегося объекта 1. закрепленный в средстве 2 крепления, а поворот второго несущего каната 13 диполей 3,4 осуществляется благодаря повороту вокруг оси 45 вертлюга 18 стабилизатора б вертикального положения диполей 3, 4, В связи с тем, что для поворота второго несущего каната 13 диполей 3, 4 вокруг оси 45 требуется значительный момент из-за наличию большего по массе, чем узел ориентирования диполей 3, 4 и их канатов 12, 13 пи потоку, стабилизатора и вертикального положения диполей 3, 4, последний выполнен с оперением 46; Этим обеспечиваются создание пары сил отузла 14 ориентирования диполей 3, 4 и их канатов 12, 13 по поток;/ и от стабилизатора 6 вертикального положе- ния диполей 3, 4 и установка диполей 3, 4 с их канатами 12, 13 по направлению вектора набегающего воздушного потока. Для обеспечения минимального отклонения диполей 3. 4 от вертикального положения стабилизатор 6 вертикального положения диполей 3, 4 выполнен удобообтекаемой формы с минимальными лобовым сопротивлением и весом. При этом он закреплен на несущем канате 8 стабилизатора б вертикального.положения диполей 3,4 посредством вертлюга 18 стабилизатора б вертикального положения диполей 3, 4, двухпарной подвесной си- стемы 11 и узла 7 крепления. Для устранения перелома несущего каната 8
стабилизатора 6 вертикального положения диполей 3, 4 а месте установки узла 14 ориентирования диполей 3. 4 и их канатов 12, 13 по потоку последний выполнен удобооб- текаемой формы с минимальными лобовым сопротивлением и весом. Для сохранения расстояния между несущим канатом 8 стабилизатора б вертикального положения диполей 3, 4 и диполями 3.4 с их канатами 12, 13 в их местах пучности установлены элементы 15, 16 стабилизации расстояния, Из- за того, что несущий канат 8 стабилизатора 6 вертикального положения диполей 3, 4 выполнен из капрона, а диполи 3,4- металлическими, имеющими другой, более низкий коэффициент линейного удлинения по сравнению с капроном, при нагружении несущего каната 8 стабилизатора 6 вертикального положений диполей 3,4 (например, при изменении величины подъемной силы и т.д.) последний изменяет свою длину. При этом изменение длины несущего каната 8 стабилизатора 6 вертикального положения диполей 3, 4 и ветви, состоящей из диполей 3, 4, выполненных металлическими, и их канатов 12, 13, выполненных из капрона, различно. Позтому в элементах 15, 16 стабилизации расстояния между несущим канатом 8 стабилизатора 6 вертикального положения диполей 3, 4 и диполями 3, 4сих канатами 12, 13 и узле 14 ориентирования диполей 3, их канатов 12, 13 по потоку выполнены отверстия 22, 23, 42 для свободного перемещения несущего каната 8 стабилизатора 6 вертикального положения диполей 3,4, Д)пя предотвращения обрыва несущих канатов 12, 13 диполей 3, 4, а также для,сохранения расположения злементов 15 стабилизации расстояния между несущим канатом 8 стабилизатора 6 вертикального положения диполей 3, 4 и диполями 3, 4 с их канатами 12, 13 в их местах пучности по длине несущего каната 8 стабилизатора 6 вертикального положения диполей 3, 4 предусмотрен предохранительный механизм 10 диполей 3, А. При изменении натяжения канатов 12, 13 диполей 3,4 измерительный ролик 59 датчика 48 натяжения второго несущего каната 13 диполей 3, 4 посредством двуплечего рычага 57 сжимает или растягивает пружину 56. Благодаря наличию шарнирного соединения 58 замыкающий контакт 60 замыкается на один из замыкаемых контактов 61 или 62.
Так как замыкающий контакт 60 связан с плюсовым выводом 73 источника питания 72. а одни концы обмоток 67 двигателя 63 соединены между собой и связаны с одним 5 концом обмотки 70 электромагнитного тормоза 65 и с минусовым выводом 71 источника питания 72, то на одну из обмоток 67 двигателя 63 и на обмотку 70 электромагнитного тормоза 65 (через диод 68 или 69)
10 подается напряжение источника питания 72. Электромагнитный тормоз 65 растормаживает вал двигателя 63, и последний через передаточный механизм 64 (например, зуб- чатукгпередачу) вращает приемный бара5 баи 66, на который наматывается (или с которого сматывается) второй несущий канат 13 диполей 3, 4. При достижении заданного натяжения ветви, состоящей из диполей 3,4 и их канатов 12,13, измеритель0 ный ролик 59 устанавливается в среднее положение, размыкая контакты 60 и 61 или 62 и отключая средство 49 натяжения второго несущего каната 13 диполей 3, 4, В связи с тем, что вертлюг 18 стабилизатора 6 вер5 тикального положения диполей 3, 4 может иметь размеры, превосходящие расстояние между несущим канатом 8 стабилизатора 6 вертикального лоложения диполей и диполями 3, 4 и их канатами 12,13, а также из-за
0 того что прохождению второго несущего каната 13 диполей 3, 4 к корпусу стабилизатора 6 вертикального положения диполей 3, 4 может мешать одна из ветвей подвесной системы 11, предохранительный механизм
5 10 диполей 3, 4 содержит средство 47 изменения направления второго несущего каната 13 диполей 3,4. При этом второй несущий канат 13 диполей 3, 4 проходит через отверстие 23 элемента 16 стабилизации рас0 стояния между несущим канатом 8 стабилизатора 6 вертикального положения диполей 3, 4 и диполями 3,4с их канатами 12, 13 и контактирует с направляющим роликом 50. вращающимся вокруг оси 52 вилки 53. 5 Для предотвращения соскакивания второго несущего каната 13 диполей 3, 4 с направляющего ролика ВО при ослаблении натяжения предусмотрен ограничитель 54 перемещения второго несущего каната 13 диполей 3,4. 0
(56) Фрадин А.З. и Рыжков Ё.В. Измерения пара,метров антенно фидерных устройств. М.; Связь, 1962, с.270. рис.9.15.
11143639812
Формула изобретения3. Устройство по п.1, отл и ча ющееся тем, что стабилизатор вертикального
Ш
г
,з
6
sa
в
IS
2:5
0l/S,
ue,
f3
2S,27
ф1/г.в
61 60фие.7
Х
Фиг,&