1
(21)4213369/23 (22)19.03.87
(46)30.1293 БюаМд 47-48 (72) Абашин АА; Кирюмн ДА: Мугилин НА: Салахов МА; Балабанов ЕЕ
(5 УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКИХ СИСТЕМ
(57) Изобретение относится к авиационной технже, в частности к устройствам буксиронм гибких систем на(фимер диполей антемшх систеч и перевода этю( гибких систем из одного пространавенного наложения в другое, и может быть использовано для определения местоположения полезных иско- лаемык нужд сельского хозяйааа и гражданской авиации Целью изо(тения является расияфение эксплуатационных возможностей и повышение
удобава использовамя за счет переориентации г)5ких сиаем из одной плоскости в другую в одном полете. Устройаво для буксировки гибких сиаем содержит движущийся в объект, нафимер вертолет 1 со cpeRciBOM Z (феплениа которое через несущий канат 3 и узел 41фепления связано со ааби- лизатором 5 тоскоаной ориентации, гибкую систему &, соаотцую из дююлей 7, В. канатов 10,11 средава перевода гибкой системы 6 из одной ллоскоаи в даугую и натяжной аабипиз фующий узел 13. На движущемся объекте 1 установлен привод (электрическая лебедка) 15. Уаройство позволяет иметь в одном полете вертикальное или горизонтальное положение дтолей 7 и 8 антенной (жтемы в завиашоаи от длины вытащенных канатов 10 гибкой системы 2 зл .ф-лы 6 ип


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство стабилизации вертикального положения диполей антенной системы на летательном аппарате | 1987 |
|
SU1550797A1 |
| Устройство для буксировки диполей антенной системы | 1986 |
|
SU1436398A1 |
| Комплекс ориентации диполей буксируемой антенной системы | 1990 |
|
SU1755522A1 |
| Устройство для буксировки антенной системы | 1987 |
|
SU1462666A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1989 |
|
SU1753669A1 |
| Устройство для ориентации буксируемой гибкой системы | 1988 |
|
SU1600226A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1638946A1 |
| Устройство для буксировки гибкой системы | 1987 |
|
SU1534920A1 |
| Способ уборки полой гибкой системы и устройство для его реализации | 1987 |
|
SU1482365A1 |


ЙсГ
Изобретение относится к авиационной технике, в частности к устройствам буксировки гибких систем, например диполей антенных систем, и перевода этих гибких систем из одного пространственного положения в другое, и может быть использовано для определения местоположения полезных ископаемых, нужд сельского хозяйства и гражданской авиации.
Целью изобретения является расширение эксплуатационных возможностей и повышение удобства пользования за счет переориентации гибких систем из одной плоскости в другую в одном полете.
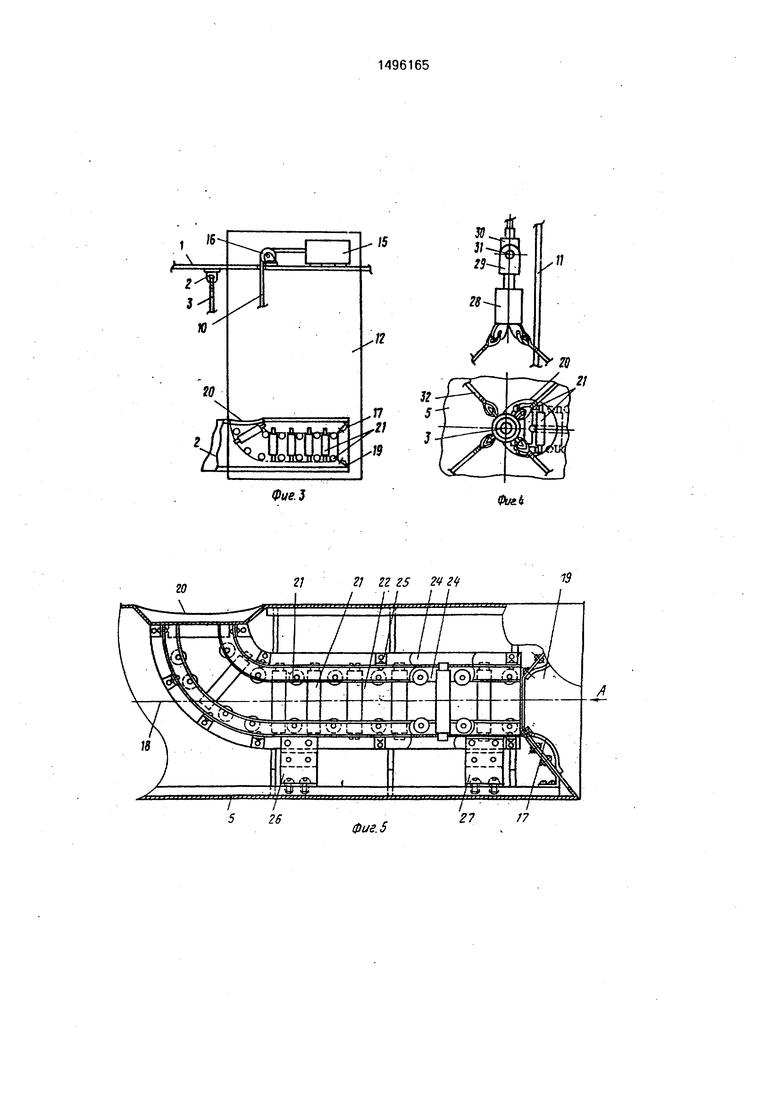
На фиг, 1 изображено усройство с вертикально расположенной гибкой системой. общий вид; на фиг, 2 - устройство с горизонтально расположенной гибкой системой, общий вид: на фиг. 3 дана конструкция средства перевода гибких систем из одной плоскости в другую; на фиг, 4 - конструкция ,узла крепления несущего каната к стабилизатору плоскостной ориентации; на фиг. 5 - конструкция механизма пространственной переориентации гибких систем; на фиг.б - вид по стрелке А на фиг, 5,
Устройство для буксировки гибких систем содержит движущийся объект, например вертолет 1 со средством 2 крепления, которое через несущий канат 3 и узел 4 крепления связано со стабилизатором 5 плоскостной ориентации, и гибкую систему 6, состоящую, например, из диполей 7, 8, одни концы которых закреплены на злемен- те 9 их крепления, и канатов 10, 11 одни концы которых связаны с другими концами диполей 7, 8,
Кроме того, устройство снабжено средством 12 перевода гибких систем 6 из одной плоскости в другую и натяжным стабилизирующим узлом 13, причем средство 12 перевода гибких систем 6 из одной плоскости в другую имеет механизм 14 пространственной переориентации гибких систем 6, привод 15 с роликом 16 и элементы 17 выталкивания натяжного стабилизирующего узла 13.
При этом другой конец каната 10 гоиб- кой систеым 6 кинематически через ролик 16 свдзаи с приводом 15, размещенным на движущемся объекте 1, а другой конец каната 11 связан с натяжным стабилизирующим узлом 13, а вдоль продольной оси 18 стабилизатора 5 плоскостной ориентации со стороны натяжного стабилизирующего узла 13 выполнено конусное отверстие 19, на боковой поверхности которого закреплены элементы 17 выталкивания натяжного стабилизирующего узла 13, выполненные с возможностью контактирования с ним. А
перпендикулярно к продольной оси стабилизатора 5 плоскостной ориентации сверху выполнено другое отверстие20. Причем, механизм 14 пространственной переориентации гибких систем 6 выполнен в виде направляющих вращающихся роликов 21. расположенных последовательно один за другим внутри стабилизатора 5 плоскостной ориентации и образующих своими боковы0 ми поверхностями канал 22 от отверстия 19 со стороны натяжного стабилизирующего- узла 13 и до отверстия 20, выполненного перпендикулярно его продольной оси сверху, для перевода гибкой системы 6 из одной
5 плоскости в другую.
Кроме того, натяжной стабилизирующий узел 13 выполнен в виде конуса с взаимно перпендикулярными стабилизирующими плоскостями 23, расположенными на его бо0 ковой поверхности. А элементы 17 выталкивания натяжного стабилизирующего узла 13 выполнены в виде дугообразных пластин, размещенных в конусном отверстии 19 стабилизатора 5 плоскостной ориентации,
5Направляющие ролики 21 закреплены
на П-о,бразных (по сечению) и Г-образных (по длине) профильных элементах 24, размещенных попарно и параллельно сверху и снизу, слева и справа относительно про0 дольной оси 18 стабилизатора 5 плоскостной ориентации.
Причем сами П-образные профилъные элементы 24 посредством уголков 25 попарно закреплены между собой и посредством
5 силовых кронштейнов 26, 27 закреплены внутри стабилизатора 5 плоскостной ориентации. А узел 4 крепления несущего каната 3 к стабилизатору 5 плоскостной ориентации выполнен в виде вертлюга 28, снабжен0 ного с верхней стороны вилкой 29 и ухом 30, расположенным внутри вилки 29 с возможностью поворота вокруг стержня 31. при этом ухо 30 связано с несущим канатом 3, а с нижней стороны вертлюг 28 снабжен че5 тырьмя ветвями 32; закрепленными на стабилизаторе 5 плоскостной ориентации.
Канат 11 и гибкая система 6 могут быть свободно пропущены между ветвями 32 через отверстие 20 стабилизатора 5 плоско0 стной ориентации.
Месторасположение отверстия 20 сверху стабилизатора 5 плоскостной ориентации определяется исход:я из конструктивных соображений, а именно из условия размеще5 ния привода 15 с роликом 16 на движущемся объекте 1 и ограничений, накладываемых конструкцией узла 4 крепления.
Крепление каната 11 к натяжному стабилизирующему узлу 13 может быть выполнено, например, заделкой конца каната 11
на коуш, который пропущен через отверстие в натяжном стабилизирующем узле 13. а элемет 9 крепления диполей 7. 8 может. например, одновременно являться корпусом антенной системы.
Диполи 7, 8 могут быть выполнены, например, из металлических канатов, концы которых заделываются на коуши.
При буксировке гибкой системы 6 в вертикальном положении для предотвращения отхода натяжного стабилизирующего узла 13 под действием различных возмущений может быть введен фиксатор натяжного стабилизирующего узла 13, выполненный, например, в виде подпружиненных шариков, закрепленных на боковой поверхности конусного отверстия 19 стабилизатора 5 плоскостной ориентации, а на натяжном стабилизирующем узле 13 выполнены соответствующие канавки для размещения в них шариков.
Устройство работает следующим образом.
При буксировке гибкой системы 6 {см. фиг, 1), например гибких диполей 7, 8 антенной системы, соединенных между собой посредством элемента 9 . крепления, вертикальное положение диполей 7, 8 обеспечивается благодаря наличию стабилизатора 5 плоскостной ориентации, подвешенного через узел 4 крепления, несущий канат 3, средство 2 крепления к движущемуся объекту 1, например вертолету, а также благодаря натяжению диполей 7. 8 антенной системы посредством привода, например злектриче- ской лебедки, и натяжного стэбилизируюд- щего узла 13, При этом, благодаря наличию взаимно перпендикулрных стабилизирующих плоскостей 23 (см, фиг. 1, 2), расположенных на боковой поверхности натяжного стабилизирующего узла 13, выполненного в виде конуса, обеспечивается продольная и путевая устойчивость стабилизатора 5 плоскостной ориентации. Боковая устойчивость стабилизатора 5 плоскостной ориентации обеспечивается узлом 4 крепления. Для перевода гибкой системы 6 из вертикального положения в горизонтальное положение по направлению вектора набегающего воздушного потока V на привод 15 (электрическую лебедку) с пульта управления лебедкой подается напряжение на выпуск натяжного стабилизирующего узла 13, Причем электрическая лебедка 15 растормаживается. При травлении каната 10 лебедкой 15 ослабляется натяжение канатов 10, 11 диполей 7,8 антенной системы. Под действием энергии сжатия элементов 17 выталкивания, расположенных в конусном отверстии хвостовой части ста&илизатора 5 плоскостной ориентации, натяжной стабилизирующей узел 13 отходит от хвоста стабилизатора 5 плоскостной ориентации и при 5 дальнейшем травлении каната 10 электрической лебедкой 15 натяжной стабилизирующий узел 13 устанавливается под действием набегающего воздушного потока по направлению его вектора V, Перемеще- 0 ние диполей 7 и 8 с элементом 9 крепления диполей 7, 8 из вертикального положения в горизонтальное осуществляется по направляющим вращающимся роликам 21 механизма 14 пространственной ориентации
5 гибких систем, расположенным в стабилизаторе 5 плоскостной ориентации. Причем направляющие вращающиеся ролики 21 образуют канал 22, через который могут быть свободно пропущены диполи 7, 8 антенной
0 системы с их элементом 9 крепления. Электрическая лебедка 15 травит канат 10 до его полного выпуска, после чего лебедка 15 автоматически отключается и стопорится. Выпуск каната на заданную длину лебедкой 15
5 может осуществляться, например, по показаниям счетчика длины каната. При полностью вытравленном канате гибкая система б переходит в горизонтальное положение, которое обеспечивается натяжным стаби0 лизирующим узлом 13, стабилизатором 5 плоскостной ориентации и лебедкой 15, При переводе гибкой системы 6 из горизонтального положения в вертикальное на лебедку 15 подается напряжение на уборку натяж5 ного стабилизирующего узла 13. Лебедка растормаживается и начинает выбирать канат 10. При этом через канал 22, образованный боковыми поверхностями направляющих вращающихся роликов 21,
0 последовательно пропускаются диполь 7, элемет 9 крепления диполей 7,8, диполь 8 антенной системы. Натяжной стабилизирующий узел 13, выполненный в виде конуса, подходит к хвостовой части стабилизатора 5
5 плоскостной ориентации, в которой выполнено конусное отверстие 19 для размещения носовой части натяжного стабилизирующего узла 13, При входе носовой части натяжного стабилизирующего узла 13 в конусное отвер0 стие 19 стабилизатора Б плоскостной ориентации, элементы 17 выталкивания натяжного стабилизирующего узла 13, выполнены е виде дугообразной формы, поджимаются боковой поверхностью натяжного стабилизирующе5 го узла 13. На участке каната 10, примыкающего к ролику 16 при вертикальном расположении гибкой системы 6, закреплена пружина, которая служит приводным элементом микровыключателя убранного положения каната. При уборке пружина входит в желоб ролика и своей боковой поверхностью надавливает на нажимное устройство, вызывая срабатывание микровыключателя, который отключает электролебедку 15.Микровыключатель, заключенный в стальной корпус, 5 N; 1436398. кл. В 64 D 3/00, 1986.
Формула изобретения1. УСТРОЙСТВО ДЛЯ БУКСИРОВКИ
ГИБКИХ СИСТЕМ, содержащее движущийся обьект со средством крепления, которое через несущий канат и узел крепления связано со стабилизатором плоскостной ориентации, отличающееся тем, что. с целью расширения эксплуатационных возможностей и повышения удобства пользования за счет переориентации гибких систем из одной плоскости в другую в одном полете, оно снабжено средством перевода гибких систем из одной плоскости в другую и натяжным стабилизирующим узлом, причем средство перевода гибких систем из одной плоскости в другую имеет механизм пространственной переориентации гибких систем, привод и элементы выталкивания натяжного стабилизирующего узла, при этом один конец гибкой системы кинематически связан с приводом, размещенным на движущемся объекте, а другой - с натяжным стабилизирующим узлом, а вдоль продольной оси стабилизатора плоскостной ориентации со стороны натяжного стабилизирующего узла выполнено конусное отверстие, на боковой поверхности которогозакрепленыэлементыв.ыталкивания натяжного стабилизирующеГ W / ft г/
имеет винт для регулировки момента его срабатывания, например в зависимости от заданного натяжения гибкой системы 6. (56) Авторское свидетельство СССР
го узла, выполненные с возможностью контактирования с ним, а перпендикулярно
10 продольной оси стабилизатора плоскостной ориентации сверху выполнено другое отверстие, причем механизм пространственной переориентации гибких систем выполнен в виде направляющих
15 вращающихся роликов, расположенных последовательно один за другим внутри стабилизатора плоскостной ориентации и образующих своими боковыми поверхностями канал от конусного отверстия со сто РОНЫ натяжного стабилизирующего узла до отверстия, выполненного перпендикулярно его продольной оси сверху, для перевода гибкой системы из одной плоскости в другую.
2,Устройство по п,1, отличающееся тем, что натяжной стабилизирующий узел выполнен в виде конуса с взаимно перпендикулярными стабилизирующими плоско Q стями, расположенными на его боковой поверхности.
35 виде дугообразных пластин, размещенных в конусном отверстии стабилизатора плоскостной ориентации.
25
2
Ч
Фие.З
2121 2Z Z5 2t Ztf
I I l LL
(
19
фиг. 5
27/7
а
27
25
Фи.б
