Изобретение относится к области авиационной техники,в частности, к конструкциям буксируемых плоских систем.
Цель изобретения - расширение эксплуатационных характеристик за счет обеспечения возможности ориентации плоской системы в трех взаимно перпендикулярных плоскостях.
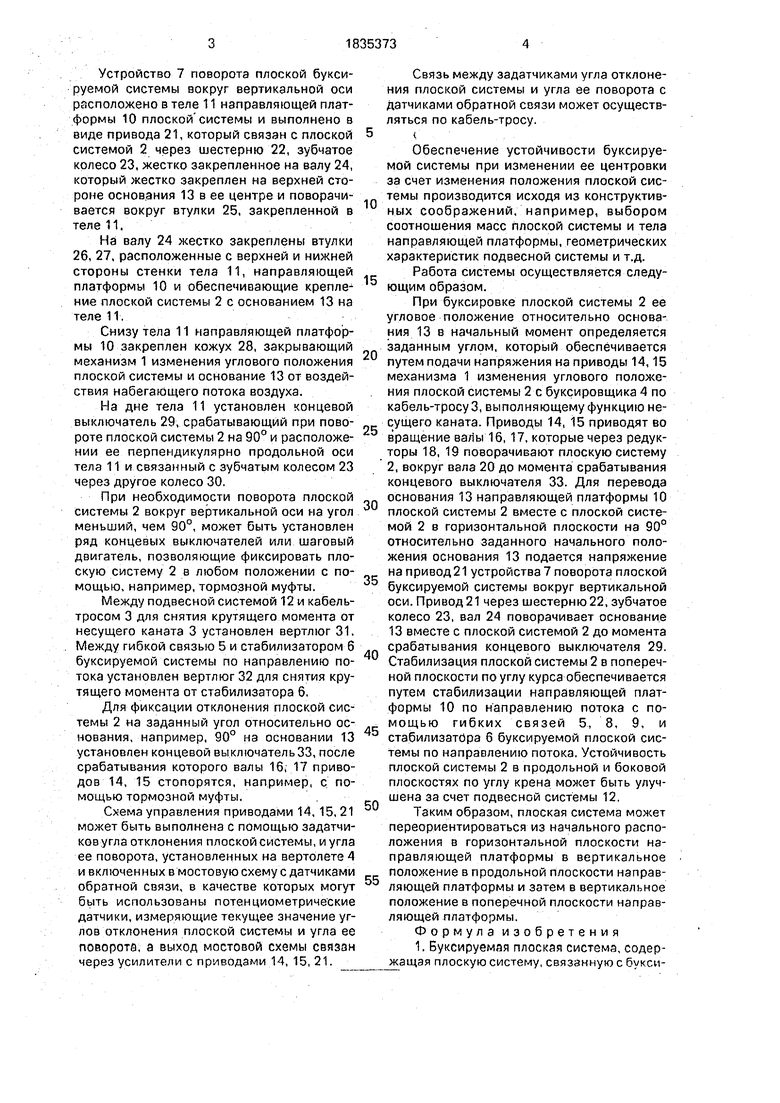
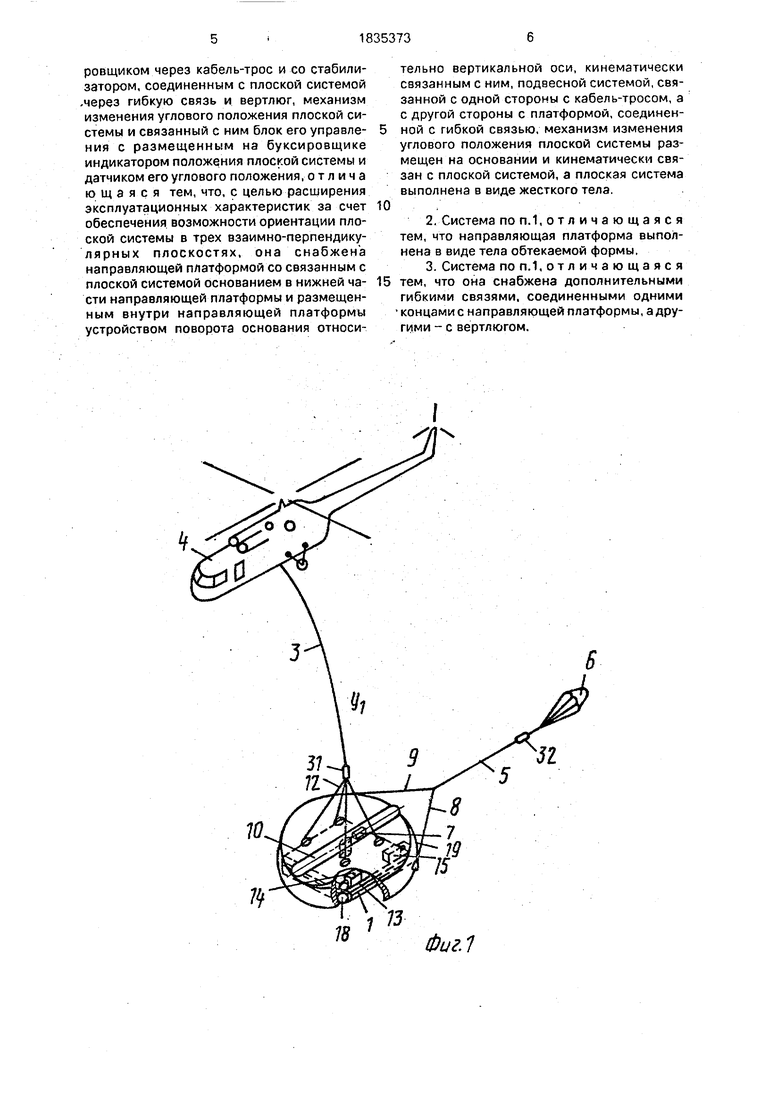
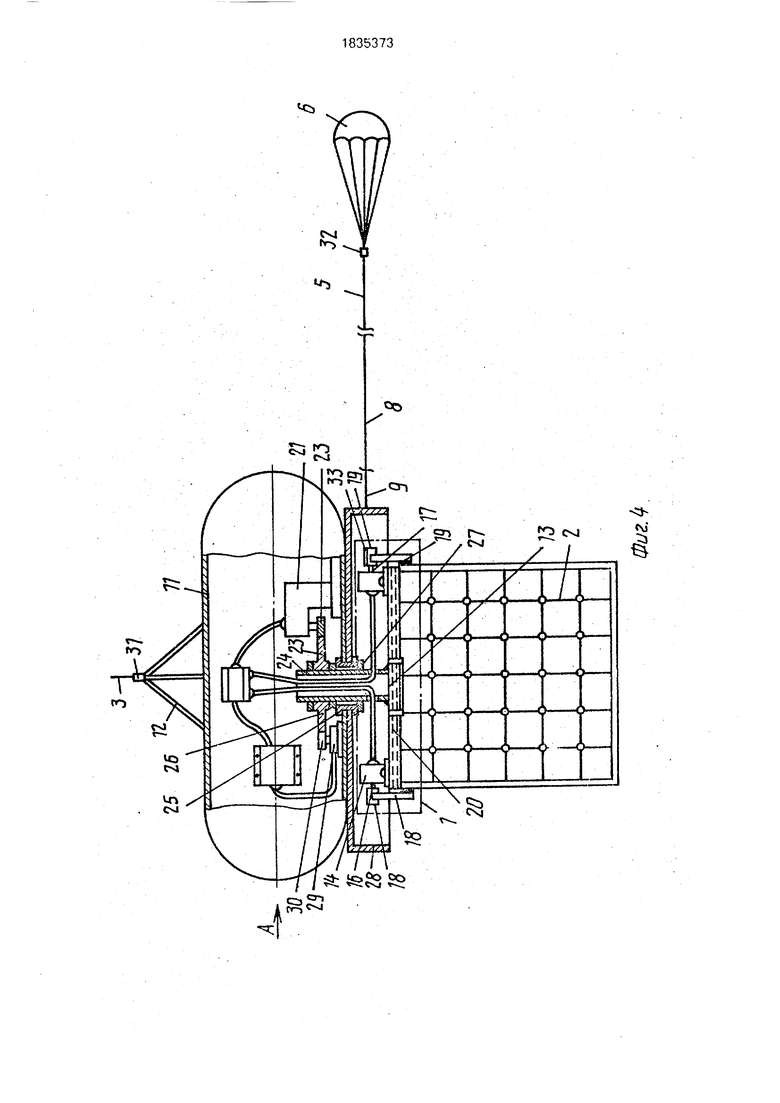
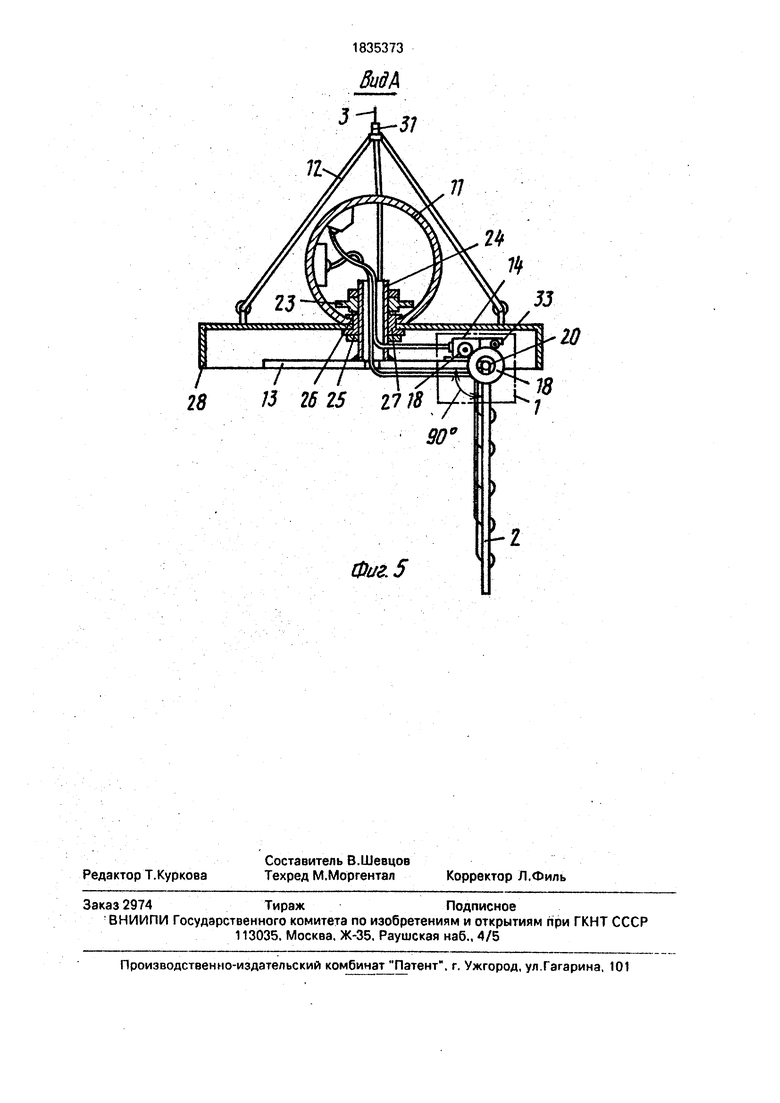
Конструкция буксируемой плоской системы представлена на фиг.1 - 5, где изображены: на фиг.1 - общий вид устройства с плоской системой, расположенной в горизонтальной плоскости; на фиг.2 - общий вид устройства с плоской системой, расположенной в продольной плоскости; на фиг.З - общий вид устройства с плоской системой, расположенной в поперечной плоскости; на фиг.4 - конструкция направляющей плат-, формы; на фиг.5 - вид А на фиг.4.
Буксируемая плоская система содержит механизм 1 изменения углового положения плоской системы 2, связанный с плоской системой 2, кабель-трос 3. связанный с буксировщиком 4, гибкую связь 5, одним концом соединенную со стабилизатором.6
буксируемой системы по направлению потока, устройство 7 поворота плоской системы 2 относительно вертикальной оси YI, дополнительные гибкие связи 8, 9, направляющую платформу 10 плоской системы, выполненную в виде тела 11 обтекаемой формы, связанного с одной стороны через подвесную систему 12с несущим канатом 3, а с другой стороны через дополнительные гибкие связи 8, -9 с другим концом гибкой связи 5.
На теле 11 снизу закреплено основание 13, расположенное в его горизонтальной плоскости.
Механизм 1 изменения углового положения плоской системы размещен на основании 13 направляющей платформы 10 и выполнен в виде приводов 14, 15, валы 16. 17 которых соединены через редукторы 18. 19 с плоской системой 2, свободно закрепленной на валу 20, который закреплен на основании 13.
Плоская система 2 выполнена в виде перфорированного жесткого тела, например, прямоугольной формы.
м
Ё
00
со
(Л GJ VI, СО
Устройство 7 поворота плоской буксируемой системы вокруг вертикальной оси расположено в теле 11 направляющей платформы 10 плоской системы и выполнено в виде привода 21, который связан с плоской системой 2 через шестерню 22, зубчатое колесо 23, жестко закрепленное на валу 24, который жестко закреплен на верхней стороне основания 13 в ее центре и поворачивается вокруг втулки 25, закрепленной в теле 11.
На валу 24 жестко закреплены втулки 26, 27, расположенные с верхней и нижней стороны стенки тела 11, направляющей платформы 10 и обеспечивающие крепление плоской системы 2 с основанием 13 на теле 11.
Снизу тела 11 направляющей платформы 10 закреплен кожух 28, закрывающий механизм 1 изменения углового положения плоской системы и основание 13 от воздействия набегающего потока воздуха.
На дне тела 11 установлен концевой выключатель 29, срабатывающий при повороте плоской системы 2 на 90° и расположении ее перпендикулярно продольной оси тела 11 и связанный с зубчатым колесом 23 через другое колесо 30.
При необходимости поворота плоской системы 2 вокруг вертикальной оси на угол меньший, чем 90°, может быть установлен ряд концевых выключателей или шаговый двигатель, позволяющие фиксировать плоскую систему 2 в любом положении с помощью, например, тормозной муфты.
Между подвесной системой 12 и кабель- тросом 3 для снятия крутящего момента от несущего каната 3 установлен вертлюг 31. Между гибкой связью 5 и стабилизатором б буксируемой системы по направлению потока установлен вертлюг 32 для снятия крутящего момента от стабилизатора 6.
Для фиксации отклонения плоской системы 2 на заданный угол относительно основания, например, 90° на основании 13 установлен концевой выключатель 33, после срабатывания которого валы 16; 17 приводов 14, 15 стопорятся, например, с помощью тормозной муфты.
Схема управления приводами 14, 15, 21 может быть выполнена с помощью задатчи- ковугла отклонения плоской системы, и угла ее поворота, установленных на вертолете 4 и включенных в мостовую схему с датчиками обратной связи, в качестве которых могут быть использованы потенциометрические датчики, измеряющие текущее значение углов отклонения плоской системы и угла ее поворота, а выход мостовой схемы связан через усилители с приводами 14, 15,21.
Связь между задатчиками угла отклонения плоской системы и угла ее поворота с датчиками обратной связи может осуществляться по кабель-тросу. t
Обеспечение устойчивости буксируемой системы при изменении ее центровки за счет изменения положения плоской системы производится исходя из конструктивных соображений, например, выбором соотношения масс плоской системы и тела направляющей платформы, геометрических характеристик подвесной системы и т.д.
Работа системы осуществляется следующим образом.
При буксировке плоской системы 2 ее угловое положение относительно основания 13 в начальный момент определяется заданным углом, который обеспечивается путем подачи напряжения на приводы 14,15 механизма 1 изменения углового положения плоской системы 2с буксировщика 4 по кабель-тросу 3, выполняющему функцию несущего каната. Приводы 14, 15 приводят во вращение валы 16, 17, которые через редукторы 18, 19 поворачивают плоскую систему 2, вокруг вала 20 до момента срабатывания концевого выключателя 33. Для перевода основания 13 направляющей платформы 10
0
5
0
5
0
5
0
5
0
5
плоской системы 2 вместе с плоской системой 2 в горизонтальной плоскости на 90° относительно заданного начального положения основания 13 подается напряжение на привод 21 устройства 7 поворота плоской буксируемой системы вокруг вертикальной оси. Привод 21 через шестерню 22, зубчатое колесо 23, вал 24 поворачивает основание 13 вместе с плоской системой 2 до момента срабатывания концевого выключателя 29. Стабилизация плоской системы 2 в поперечной плоскости по углу курса обеспечивается путем стабилизации направляющей платформы 10 по направлению потока с помощью гибких связей 5, 8, 9, и стабилизатора 6 буксируемой плоской системы по направлению потока. Устойчивость плоской системы 2 в продольной и боковой плоскостях по углу крена может быть улучшена за счет подвесной системы 12.
Таким образом, плоская система может переориентироваться из начального расположения в горизонтальной плоскости направляющей платформы в вертикальное положение в продольной плоскости направляющей платформы и затем в вертикальное положение в поперечной плоскости направляющей платформы.
Формула изобретения 1. Буксируемая плоская система, содержащая плоскую систему, связанную с буксировщиком через кабель-трос и со стабилизатором, соединенным с плоской системой .через гибкую связь и вертлюг, механизм изменения углового положения плоской системы и связанный с ним блок его управления с размещенным на буксировщике индикатором положения плоской системы и датчиком его углового положения, от л и ч а ю щ а я с я тем, что, с целью расширения эксплуатационных характеристик за счет обеспечения возможности ориентации плоской системы в трех взаимно-перпендику- лярных плоскостях, она снабжена направляющей платформой со связанным с плоской системой основанием в нижней части направляющей платформы и размещенным внутри направляющей платформы устройством поворота основания относи
тельно вертикальной оси, кинематически связанным с ним, подвесной системой, связанной с одной стороны с кабель-тросом, а с другой стороны с платформой, соединенной с гибкой связью, механизм изменения углового положения плоской системы размещен на основании и кинематически связан с плоской системой, а плоская система выполнена в виде жесткого тела.
2.Система по п. 1, о т л и ч а ю щ а я с я тем, что направляющая платформа выполнена в виде тела обтекаемой формы,
3.Система по п.1, от л и ч а ю ща я с я 15 тем, что она снабжена дополнительными
гибкими связями, соединенными одними концами с направляющей платформы, а другими - с вертлюгом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1989 |
|
SU1753669A1 |
| Способ определения аэродинамических характеристик моделей и устройство для его осуществления | 1986 |
|
SU1462970A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ТЕЛА | 1988 |
|
SU1619602A1 |
Изобретение относится к области авиационной техники,в частности, к конструкци- ям буксируемых плоских систем. Цель изобретения - расширение эксплуатацион- .ных характеристик за счет обеспечения возможности ориентации плоской системы в трех взаимно перпендикулярных плоскостях. Цель достигается введением устройства 7 поворота основания 13, на котором закреплена плоская систем а 2, относительно вертикальной оси. Устройство 7 и механизм изменения углового положения плоской системы 2 обеспечивают перевод плоской системы 2 в горизонтальную и вертикальные продольную и поперечную плоскости. 2 з.п.ф-лы, 5 ил.
Щ
Фиг.1
/5
79
W
(Риг.З
к
f4i
l
11
31
11
24
Фиг. 5
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1988 |
|
SU1797238A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
