1
(21)4723776/23 (22) 26.07.89
(46)301293 Бкж№ 47-48 (72) Абашин АА Мутилин НА; Салахов МА; Балабанов В В.
(54) УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ
(57) Изобретение относится к авиационной технике, в частности к конструкциям устройств для буксировки гибких дипольных систем Цель изобретения
- повышение точности ориентирования гибкой системы относительно направления потока Несущий модуль с опорным основанием 14 снабжен поворотным основанием 15, внутри которого закреплена гибкая система 5 Блок управления положением гибкой системы 5 содержит датчик 13 угла сноса измеряющий угол отклонения гибкой системы относительно касательной к траектории буксировки, а привод поворачивает основание 15 до тех пор, пока этот угол не станет равным нулю 2 зпф-лы, 8 ид
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для буксировки гибкой системы | 1989 |
|
SU1638946A1 |
| Буксируемая система | 1988 |
|
SU1724513A1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1989 |
|
SU1746632A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ТЕЛА | 1988 |
|
SU1619602A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
ы
d
а
Фиг
ON
ON U 00 00 00
Изобретение относится к авиационной ехнике, в частности к конструкциям устойств для буксировки гибких дипольных истем.
Цель изобретения - повышение точности ориентирования гибкой системы отно- ситзльно направления потока.
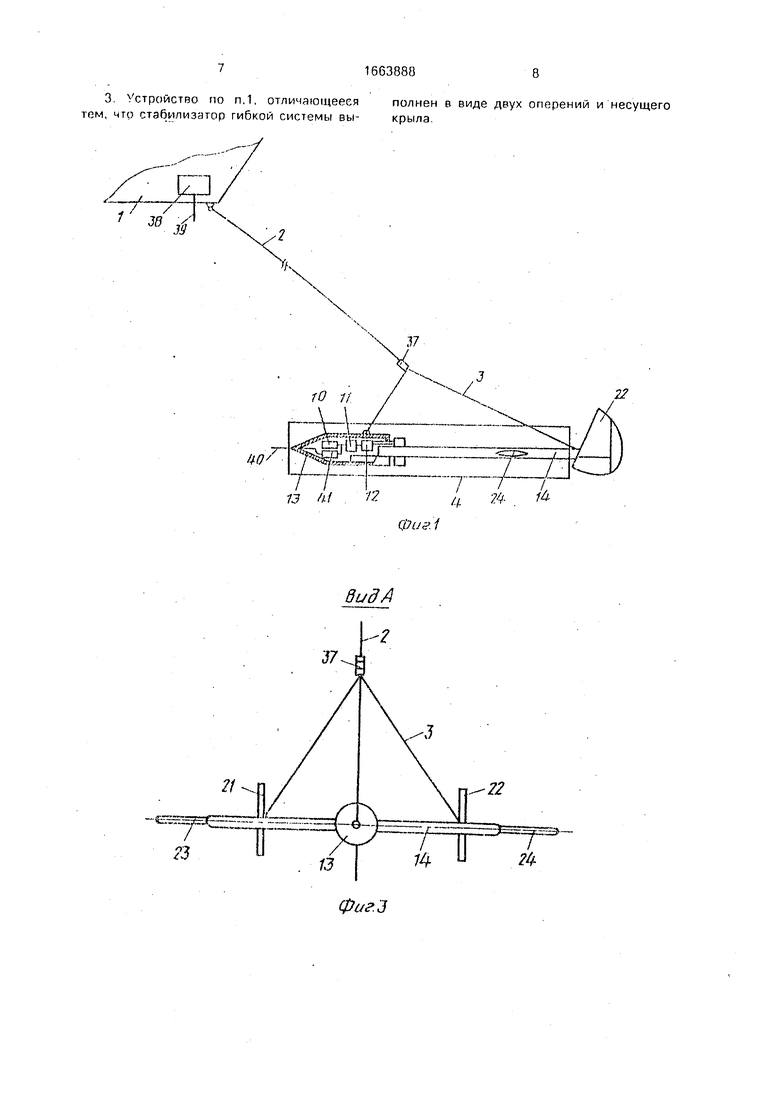
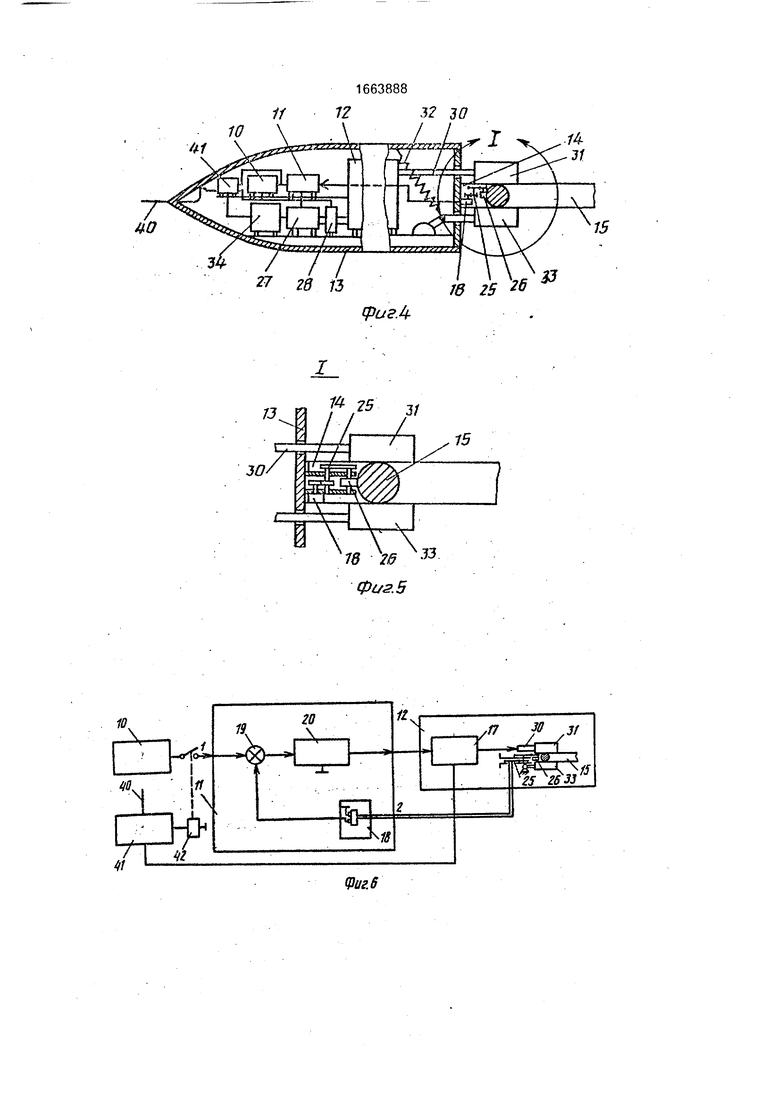
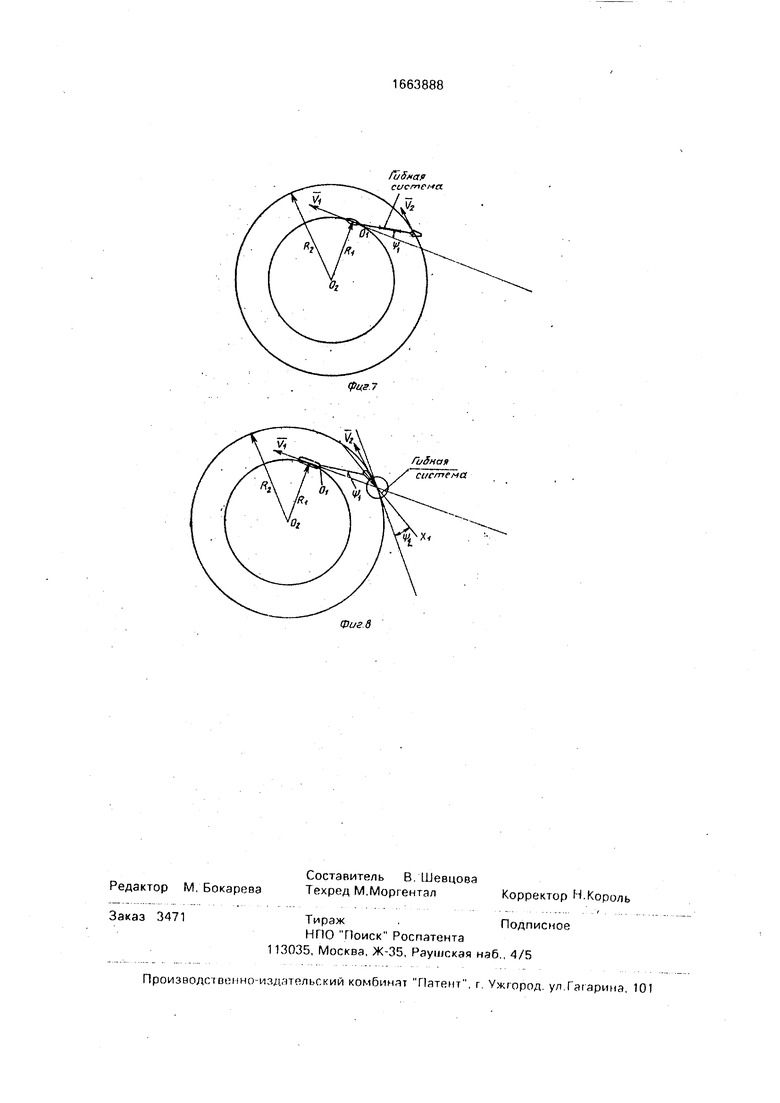
На фиг.1 изображено устройство, вид боку; на фиг. 2 - устройство, вид сверху; на иг. 3 - вид по стрелке А на фиг,2; на фиг. 4 носовая часть несущего модуля; на фиг. 5 - узел I на фиг.4; на фиг.6 - конструкция связи блока управления положением гибкой системы сдатчиком угла ее сноса и механизмом стабилизации положения гибкой системы; на фиг. 7 - схема, поясняющая работу устройства при сносе гибкой системы, вид сверху; на фиг. 8 - схема, поясняющая работу устройства при стабилизации заданного положения гибкой системы, вид сверху.
Устройство для буксировки гибкой системы содержит буксировщик 1, который через несущий канат 2 и подвесную систему 3 связан с несущим модулем 4, на котором закреплена гибкая система 5, состоящая из двух гибких диполе1 6, 7 антенной системы, связанных между собой генератором 8, и стабилизатора 9 гибкой системы. Устройство также снабжено датчиком 10 угла сноса гибкой системы, блоком 11 управления положением гибкой системы, механизмом 12 стабилизации положения гибкой системы.
Несущий модуль 4 гибкой системы имеет носовую часть 13 и опорное основание 14, выполненное в виде кольца и закрепленное на носовой части 13 несущего модуля 4, Механизм 12 стабилизации положения гибкой системы содержит поворотное основание 15, опорные ролики 16 и привод 17, причем опорные ролики 16 закреплены внутри опорного основания 14 и взаимодействуют с поворотным основанием 15, внутри которого размещена гибкая система 5, и которое кинематически связано с приводом 17, размещенным в носовой части 13 несущего модуля 4.
Датчик 10 угла сноса гибкой системы электрически связан с первым входом блока 11 управления положением гибкой системы, выход которого связан с приводом 17. Поворотное основание 15 кинематически связано со вторым входом блока 11 управления положением гибкой системы, при этом стабилизатор 9 закреплен на опорном основании 14. Блок 11 управления положением гибкой системы содержит датчик 18 положения гибкой системы, сумматор 19 и усилитель 20, причем выходы датчика 10 угла сноса гибкой системы и датчика 18 положения гибкой системы связаны через сумматор 19 и усилитель 20 с приводом 17.
Стабилизатор 9 выполнен в виде двух оперений 21, 22, состоящих из вертикальных и горизонтальных плоскостей, и крыла, состоящего из двух Частей 23, 24, обеспечивающих компенсацию момента тангажа несущего модуля 4 от силы натяжения несущего каната 2. Датчик 18 положения
гибкой системы закреплен в носовой части 13 несущего модуля 4 и кинематически связан через передаточный механизм 25 и измерительный ролик 26 с поворотным основанием 15. Привод 17 содержит элект5 родвигатель 27, электромагнитную муфту 28 и редуктор 29, выходной вал 30 которого связан с ведущим роликом 31, контактирующим с поворотным основанием 15, снизу которого напротив ведущего ролика 31 раз0 мещен подпружиненный упругим элементом 32 ролик 33.
Для запитки датчика 10 угла сноса гибкой системы блока 11 управления положением гибкой системы и электродвигателя 27
5 на носовой части 13 несущего модуля установлен аккумулятор 34. Для удержания re-, нератора 8 в заданном положении предусмотрены дополнительные канаты 35, 36, которые выполнены из диэлектри0 ческого материала и могут быть как гибкими, так и жесткими.
Между несущим канатом 2 и подвесной системой 3 для снятия момента от закручивания несущего каната 2 может быть уста5 ноален вертлюг 37, Включение схемы управления положением гибкой системы осуществляется с борта буксировщика 1 по радиоканалу с помощью передатчика 38 команд и передающей антенны 39, а на носо0 вой части 13 несущего модуля 4 установлена приемная антенна 40 и приемник 41 команд, причем включение схемы управления положением гибкой системы осуществляется подачей напряжения на электромагнитную
5 муфту 28 и подключением выходного сигнала датчика 10 угла сноса гибкой системы ко входу блока 11 управления положением гибкой системы например, через контакты реле 42.
0Передача сигнала на включение схемы
управления положением гибкой системы может осуществляться и по кабель-тросу. Для исключения влияния магнитных свойств материала на характеристики гиб5 кой системы крыло и оперения могут быть выполнены из диэлектрического материала. Также из диэлектрика выполнены опорные ролики, опорное и вращающееся основание, носовая часть несущею модуля, несущий канат, вертлюг, подвесная система.
Ведущий и прижимной ролики выполнены из диэлектрического материала с высоким коэффициентом трения.
Передаточный механизм выполнен в виде редуктора, снижающего скорость враще- ния щетки потенциометра датчика положения гибкой системы по отношению к скорости вращения поворотного основания.
Устройство работает следующим образом.
В исходном положении гибкая система 5 расположена вдоль продольной оси несущего модуля 4, и при буксировке ее через несущий канат 2 и подвесную систему 3 гибкая система 5 вместе с несущим модулем 4 отклоняется на угол 7/2 от касательной к круговой траектории с радиусом R2.
Отклонение несущего каната 2 на угол от касательной к траектории перемещения с радиусом RI буксировщика 1 приводит к изменению радиуса буксировки гибкой системы и не влияет при предложенной конструкции на угол ty отклонения гибкой системы 5. При выходе на заданный радиус буксировки Ra относительно расположения наземных средств (точка 02) с буксировщика 1 по радиоканалу подается сигнал на включение схемы управления положением гибкой системы 5. При этом сигнал с передатчика 38 команд и передающую ан- тенну 39 поступает на приемную антенну 40 и приёмник 41 команд и далее на электромагнитную муфту 28, подключающую вал электродвигателя 27 через редуктор 29 к ведущему ролику 31, и на реле 42, которое своими контактами подключает выход датчика 10 угла сноса гибкой системы ко входу 1 блока 11 управления положением гибкой системы. Датчик 10 угла сноса гибкой систе
Формула и,з обретения
мы измеряет угол fa между касательной к траектории движения с радиусом R2 и продольной осью несущего модуля 4, вдоль которой в начальный момент расположена гибкая система 5. Сигнал с датчика 10 угла сноса гибкой системы поступает на сумматор 19, где сравнивается с сигналом датчика 18 положения гибкой системы. Сигнал ошибки Е поступает на усилитель 20 и далее на привод 17 механизма 12 стабилизации положения гибкой системы. Электродвигатель 27 привода 17 через муфту 28 и редуктор 29 поворачивает выходной вал 30, на котором закреплен ведущий ролик 31. обеспечивающий вместе с прижимным роликом 33 перемещения поворотного основания 15 внутри опорного основания 14 посредством опорных роликов 16. Поворотное основание 15 в свою очередь перемещает измерительный ролик 26, с которым через редуктор 25 связана подвижная часть (шток) датчика 18 положения гибкой системы. Сигнал с датчика 18 положения гибкой системы поступает на сумматор 19 в качестве сигнала обратной связи. Электродвигатель 27 привода 17 работает до тех пор, пока ошибка Ј на входе усилителя 20 не будет равна нулю. В этом случае гибкая система 5 занимает положение вдоль касательной к круговой траектории с радиусом RZ. При действии возмущений, например порыва ветра, на несущей модуль 4 стабилизация положения гибкой системы вдоль касательной к траектории осуществляется аналогичным образом.
(56) Авторское свидетельство СССР № 1496165, кл. В 64 D 3/00, 1987
50
кольца, при этом опорные ролики закреплены внутри опорного основания с возможностью взаимодействия с поворотным 45, основанием, причем стабилизатор гибкой системы Закреплен на опорном основании, j первый вход блока управления положени- ем гибкой системы связан с поворотным основанием, другой его вход связан электрически с датчиком угла сноса, а его выход - с приводом.
3 Устройство по п.1, отличающееся полней в виде двух оперений и несущего тем, что стабилизатор гибкой системы вы- крыла
™ 39
Л
ж
Ч 37
Вид А
24фиг.З
1663888 1232 30
/ / /
27 2в 13JQ Я
фигЛ
MXJ
лл
10
Фи2.5
ГиЗнар система
Ги5ная
cucmfMQ
Фиг в
