Изобретение относится к технике управления многопозиционными транспортными механизмами и может быть использовано в системах адресования, например, лифтов, шахтных подъемных установок, складских штабелеров и т.п.
Цель изобретения состоит в упрощении устройства.
Поставленная цель достигается введением в устройство п-2 (где п-число пунктов обслуживания) вторых замыкающих контактов датчика местоположения кроме первого и последнего датчиков, одни выводы которых соединены с отрицательной клеммой источников напряжения, а другие подключены к анодам диодов второй группы диодов, катод каждого на которых кроме последнего подключены к аноду последующего диода. Катод последнего диода второй тгруппы диодов через замыкающий контакт последнего датчика местоположения соединен с
отрицательной клеммой источника напряжения, которая через замыкающий контакт первого датчика местоположения соединена с катодом первого диода первой группы диодов, анод каждого из диодов первой группы диодов, кроме последнего, соединен с катодом последнего диода, анод последнего диода первой группы диодов подключен к другому выводу последнего замыкающего контакта первой группы замыкающих- контактов, задатчика адреса следования, другой вывод первого замыкающего контакта второй группы контактов задатчика адреса следования подключен к аноду первого диода второй группы диодов.
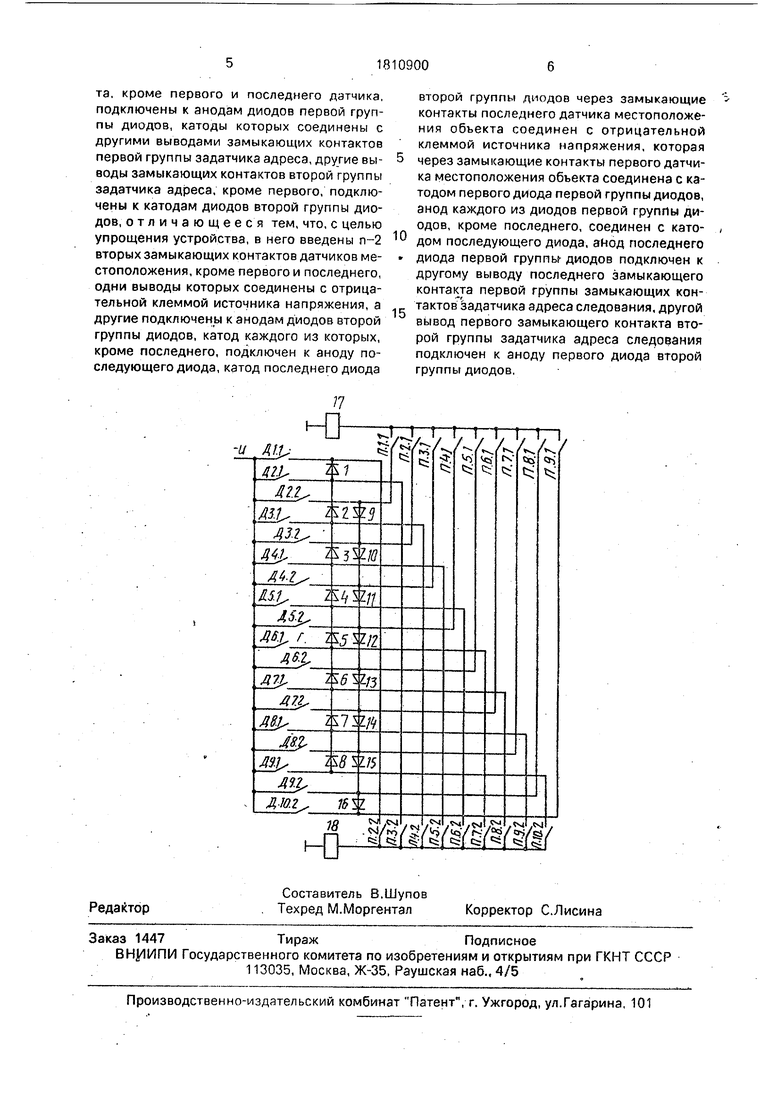
На чертеже приведена принципиальная схема предлагаемого устройства для случая 10 пунктов обслуживания. Эта схема предполагает использование источника питания с активным минусом и общим плюсом. В случае использования источника питания
00
о ю о о
противоположной полярности необходимо изменить полярность включения всех диодов.
В состав устройства входят датчики Д1-Д10 местоположения транспортного объекта на пунктах обслуживания. Все датчики кроме первого Д1 и последнего Д10 имеют два замыкающих контакта Д1.1 иД.2. Крайние датчики имеют по одному замыкающему контакту Д1.1 и Д10.2.
Задание адреса следования объекта производится с помощью задатчика адреса следования П на число положений, равное числу пунктов обслуживания. Этот переключатель для всех положений кроме первого (11. и последнего П. 10 содержит по два замыкающих контакта, сгруппированных в две группы.
Устройство содержит две группы.диодов 1-16, соединенных по восемь в последовательные цепочки 1-8 и 9-16.
Одни выводы первой и второй групп замыкающих контактов задатчика адреса следования П через обмотки соответствующих реле направления 17 или-18 подключены к положительной клемме источника напряжения. Исполнительными органами устройства являются реле 17 для направления назад (в направлении пункта с меньшим номером) и реле 18 для направления вперед (в направлении пункта с более высоким номером).
Аноды диодов 1-8 первой группы диодов соединены через первые замыкающие контакты Д2.1-Д9.1 датчиков местоположения объекта кроме первого Д1 и последнего Д10 с отрицательной клеммой источника питания. Аноды диодов 9-16 второй группы диодов соединены с отрицательной клеммой источника питания через вторые замыкающие контакты Д2.2-Д9.2 датчиков местоположения объекта кроме первого Д1 и последнего Д10. При этом анод 1-го диода соединен с контактом (I +1)-го датчика местоположения объекта.
Другие выводы замыкающих контактов П2.2-П.10.2 первой группы (нижней на чертеже) замыкающих контактов задатчика адреса следования соединены с первыми замыкающими контактами Д1.1-Д9.1 соответственно датчиков местоположения объекта кроме последнего Д10.
Другие выводы замыкающих контактов П1.1 -П.9.1 второй группы (верхней на чертеже) замыкающих контактов задатчика адреса следования соединены со вторыми замыкающими контактами Д2.2-Д10.2 соответственно датчиков местоположения объекта кроме первого Д1.
Устройство работает следующим образом.
В исходном положении транспортный объект находится на одном из пунктов обслуживания. При этом срабатывает датчик местоположения, расположенный на этом
пункте, замыкая свои контакты. Предположим, например, что объект находится ан 5 пункте: в этом случае замкнуты первый Д5.1 и второй Д5.2 контакты датчика Д5. Контакты остальных датчиков местоположения разомкнуты.
В зависимости от желаемого адреса поездки задатчика адреса следования устанавливается в необходимое положение. Например, задатчиком задан 8 пункт следования. В восьмом положении задатчикз адреса замыкается контакт П.8.1 первой и П.8.2 второй группы замыкающих контактов.
Для каждого сочетания состояния датчика местоположения и задатчика адреса следования существует детерминированная цепь тока от источника питания к одному из реле. В нашем примере формируется следующая цепь тока: источник питания контакт Д5.1 датчика - диод 5 - диод 6 контакт П.8.2 - реле 18 вперед. Реле 17
назад в это время обеспечено. Теп самым
осуществлен выбор направления движения.
При установке задатчика адреса П в 5
положение оба реле 17, 18 обесточены.
При установке переключателя в положение меньше 5, например, второе, собирается электрическая цепь: источник питания - контакт Д5.2 датчика - диод 11 - диод 10 .- контакт П.2.1 - реле 17 назад. Реле 18 вперед в это время обесточено.
Таким образом происходит автоматиче- з ский выбор направления движения объекта
в направлении, заданным задатчиком адреса следования.
Формула изобретения
Устройство выбора направления движения, содержащее задатчик адреса следования на п положений по числу пунктов адресования, состоящий из двух групп замыкающих контактов, одни выводы первой
и второй групп замыкающих контактов через обмотки соответствующих реле направлений подключены к положительной клемме источника напряжения, отрицательная клемма которого через первые замыкающие контакты датчиков местоположения объек
та, кроме первого и последнего датчика, подключены к анодам диодов первой группы диодов, катоды которых соединены с другими выводами замыкающих контактов первой группы задатчика адреса, другие выводы замыкающих контактов второй группы задатчика адреса, кроме первого, подключены к катодам диодов второй группы диодов, отличающееся тем, что, с целью упрощения устройства, в него введены л-2 вторых замыкающих контактов датчиков местоположения, кроме первого и последнего, одни выводы которых соединены с отрицательной клеммой источника напряжения, а другие подключены к анодам диодов второй группы диодов, катод каждого из которых, кроме последнего, подключен к аноду последующего диода, катод последнего диода
10
15
второй группы диодов через замыкающие контакты последнего датчика местоположения объекта соединен с отрицательной клеммой источника напряжения, которая через замыкающие контакты первого датчика местоположения объекта соединена с катодом первого диода первой группы диодов, анод каждого из диодов первой группы диодов, кроме последнего, соединен с катодом последующего диода, анод последнего диода первой группы- диодов подключен к другому выводу последнего замыкающего контакта первой группы замыкающих контактов задатчика адреса следования, другой вывод первого замыкающего контакта второй группы задатчика адреса следования подключен к аноду первого диода второй группы диодов,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1490062A1 |
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU800071A1 |
| Устройство опроса объектов измерения и сигнализации | 1985 |
|
SU1265826A1 |
| Устройство для автоматического управления перемещением подвижного объекта | 1987 |
|
SU1456347A1 |
| Устройство для передачи сигналов | 1980 |
|
SU963048A1 |
| Устройство для проблесковой сигнализации изменения состояния контролируемого объекта | 1981 |
|
SU999079A1 |
| Устройство для проверки исправности кабелей Кокошинского В.П. | 1990 |
|
SU1772768A1 |
| Устройство телемеханики | 1984 |
|
SU1241274A1 |
| Устройство для автоматического выбора направления движения объекта | 1989 |
|
SU1669827A1 |
| Устройство для тревожной сигнализации | 1986 |
|
SU1356830A1 |
Изобретение относится к технике управления многопозиционных транспортных объектов и касается построения технических средств для автоматического реверса при адресовании движения. Сущность изобретения заключается в Специфическом построении логической диодной матрицы в виде двух разнонаправленных цепочек последовательно соединенных диодов, подключенных с одной стороны к контактам датчиков местоположения управляемого объекта, а с другой - к контактам адресова- теля. Изобретение позволяет резко сократить число диодов матрицы по сравнению с традиционно используемой схемой. 1 ил. ел
4}
vJ«J, t, Ь М/ 1/1, I/
| Маякович А.Р | |||
| Автоматическое адресование | |||
| -Л.: Энергоиздат | |||
| Ленинградское отделение, 1982, с.40. |
