(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1270089A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1425146A1 |
| Устройство для автоматического выбора направления движения объекта | 1986 |
|
SU1323485A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Устройство для автоматического поиска неисправностей | 1972 |
|
SU467331A1 |
| Устройство для выбора оптимальных двухпараметрических рядов | 1983 |
|
SU1228119A1 |
| МНОГОМЕРНЫЙ СТАТИСТИЧЕСКИЙ АНАЛИЗАТОР УСРЕДНЕННОЙ МОЩНОСТИ НЕСТАЦИОНАРНОЙ НАГРУЗКИ | 1992 |
|
RU2060542C1 |
| Устройство цикловой синхронизации многоканальных систем связи | 1990 |
|
SU1757116A1 |
| Устройство для автоматического выбора направления движения объекта | 1981 |
|
SU1066917A1 |
| Устройство для контроля | 1986 |
|
SU1363169A1 |
Изобретение относится к автоматизации промышленного транспорта, в частности к устройствам автоматического управления подвижными объектами, и может найти применение при соз дании систем автоматической загрузки многосекционных емкостей горнообогатительных комбинатов, в управлении штабелерами, грузоносителями конвейеров, укладчиками и т.д. Известно устройство для автоматического выбора направления движения объекта, содержащее последовательно соединенные нормально замкнутые путевые выключатели, прерыватель,расположенный на объекте, задатчик адр са, два реле направления перемещения, узел развязывающих диодов и ис точник питания 1 . Однако устройство применяется только тогда, когда расстояние межд соседними путевыми выключателями сравнительно невелико, так как длин прерывателя должна превышать рассто ние между выключателями на двойную длину выбега объекта. Известно также устройство, содер жащее датчик положения, блоки памяти, схему Запрет, переключатель с двумя контактными полями для разреш НИН движения, щетки которого перемещаются синхронно, переключатель с одним контактным полем для исполнения , мостовую схему, образованную резисторам, и источник питания 2. Недостатком устройства является большое количество коммутационных элементов, что усложняет его и снижает надежность. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для автоматического выбора направяения движения объекта содержащее датчики положения и задатчик адреса,выполненный на контактных переключателях, разделительные блоки и элементы Запрет {3. Однако это устройство не обеспечивает дистанционного контроля местоположения подвижного объекта, что вынуждает оператора постоянно контролировать перемещение подвижного объекта визуально. В условиях, например, горнообогатительного комбината, где шихта распределяется загрузочными агрегатами, перемещающимися вдоль многосекционных аккумулирукндих емкостей до 500 м, необходимость визуального контроля перемещения загрузочного агрегата приводит к большой потере рабочего времени. Также недостатком устройства является невысокая надежность его работы, так как в случае выхода датчиков положения и строя или случайного их включения возможно появление двух сигналов Назад и Вперед, один из которых ложный, что может привести к аварийному режиму. Применение в качестве задатчика адреса переключателя с двумя контактными полями увеличивает число механически переключаемых контактов, что также снижает надежность работы устройства.
Цель изобретения - расширение функциональных возможностей и повышение надежности работы устройства.
Поставленная цель достигается тем что устройство снабжено триггером и индикаторами местоположения объекта по числу позиций адресования и многовходовыми элементами ИЛИ переключат ели задатчика адреса соединены последовательно и их свободные выводы подключены к прямым входам первого и второго и к инверсным входам второго и первого элементов Запрет соответственно, оба вывода каждого из переключателей через один из разделительных блоков подключены к прямому выходу одного из триггеров, единичный вход которого соединен с выходом одного из датчиков положения, причем датчики положения с четными и нечетными порядк0выми номерами подключены соответственно ко входам одного и другого многовходовых элементов ИЛИ, выходы которых подключены к нулевым входам триггеров с нечетными и четными порядковыми номерами соответственно, к инверсному выходу каждого из которых подключен один из индикаторов местоположения объекта.
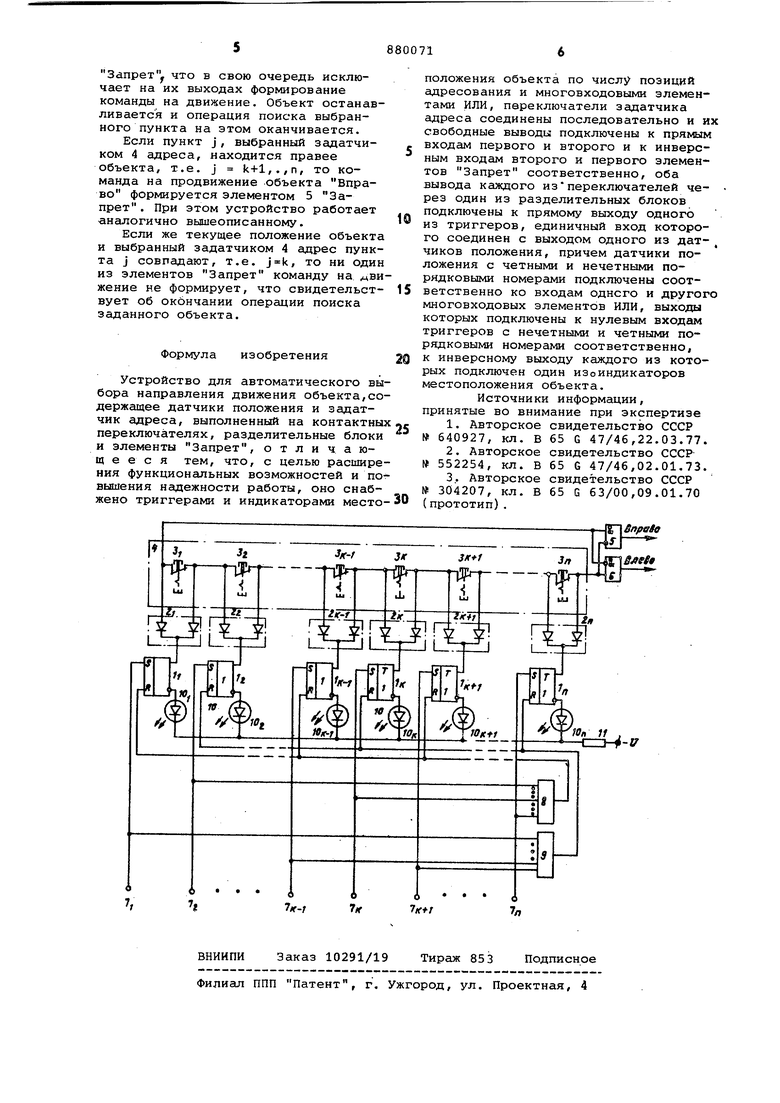
На чертеже изображена схема устройства.
Устройство содержит триггеры (. ,...,1п/ прямые выходы которых через диоды разделительных блоков 2 -2f, подключены к выводам нормально замкнутых размыкающих контактов соответствующих переключателей 3 ,. ..,3 с зависимой фиксЬцией п-позиционного задатчика 4 адреса. Свободные выводы первого и последнего из последовательно соединенных переключателей соединены с прямыми входами первого 5 и второго бис инверсными входами второго 6 и первого 5 элементов Запрет соответственно. Вход установки в состояние 1 каждого i-Toro,(,...,п триггера соединен с выходом соответствующего датчика положения с контактами 7 -7 .
Выводы контактов датчиков положения с четными и нечетными порядковыми номерами объединены соответственно через первый 8 и второй 9 многовходовые элементы ИЛИ, выходы которых подключены к входам установки в О триггеров с нeчeтны.ttl и четными порядковыми номерами соответственно, инверсные выходы которых соединены с анодами соответствующих элементов индикации местоположения объекта, например светодиодов 10 Ю катоды которых объединены и через резистор 11 подключены к источнику питания.
В исходном состоянии объект неподвижен и находится, например, в зоне срабатывания датчика положения с контактом 7, , единичным сигналом с выхода которого триггер 1 установлен в 1 и светодиод 10 активизирован, так как на его аноде присутствует нулевой сигнал, снимаемый с инверсного выхода триггера 1 ., Единичный сигнал с прямого выхода последнего через диоды разделительного блока 2 и размыкающие контакты переключат елей задатчика 4 адреса поступает одновременно на прямые и инверсные входы элементов 5 и б Запрет. Одновременное присутствие единичных сигналов на инверсных входах этих элементов исключает формирование на их выходах команд управления движением.
Устройство работает следующим образом.
Если пункт j, выбранный задатчиком 4 адреса, находится левее объекта, т.е. j l,.,k-l, то единичный сигнал с выхода триггера 1 через раделительный блок 2j/ и замкнутые контакты переключателей 3, , , ,3 задатчика 4 адреса продолжает поступат на прямой вход элемента б Запрет, а так как единичный сигнал с инверсного входа этого элемента снят разомкнутым контактом переключателя 3j задатчика 4 адреса, то на выходе элемента б Запрет формируется команда на движение Влево.
При передвижении объекта в сторону выбранного адреса единичным сигналом с выхода калсдого следующего по ходу движения датчика положения соответствующий ему триггер устанавливается в 1 и одновременно этим же сигналом через соответствующий многовходовой элемент 8 или 9 ИЛИ каждый предыдущий триггер возвращается в исходное состояние.
При достижении объектом заданного j-Toro пункта, о чем свидетельствует свечение j-того светодиода, единичный сигнал с прямого выхода j-того триггера через j-тьJй разделительный блок поступает на оба вывода разомкнутого контакта переключателя 3j , что обеспечивает одновременное появление единичных сигналов на прямых и инверсных входах элементов 5 и б
