СО
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1989 |
|
SU1669827A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1555246A2 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1539148A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1461722A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1289764A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1184768A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Устройство для автоматическогоупРАВлЕНия дВижЕНиЕМ Об'ЕКТА | 1979 |
|
SU839922A1 |
Устройство для автоматического выбора направления движения относится к промышленному транспорту и м.б. использовано для управления кранами, штабелерами. Для уменьшения энергопотребления и повышения ресурса работы датчики 28-30 фактического положения объекта, установленные на позициях адресования, подключены через диоды 40-42 к кнопке 43, которая включена в плюсовую шину источника питания. К плюсовой шине источника питания подключен подвижный контакт 2 задатчика 1 адреса. Неподвижные контакты 3-5 задатчика 1 подключены к шинам адресования (ША) 6-8. Через диоды 9-13 ША подключены к блоку 15 фактического положения в виде замыкающих контактов 16-24 промежуточных реле 25-27. Вторые выводы контактов 16-24 подключены к обмоткам 33-36 поляризованных реле 31, 32. Неподвижные контакты ША 6-8 подключены через аноды 37-39 соответственно к датчикам 28-30 фактического положения. При установке требуемого адреса и нажатии кнопки 43 питание поступает через диоды 40-42 к датчикам 28-30. Срабатывает датчик, у которого находится объект, включая соответствующее промежуточное реле 25-27. Замыкаются контакты реле, обеспечивая поступление питания по цепи: соответствующие замкнутые контакты, задатчик адреса, ША 6-8, разделительные диоды 9-13 к включающей обмотке 33 или 34 поляризованного реле 31 или 32. Движение объекта начинается в требуемом направлении. 1 ил.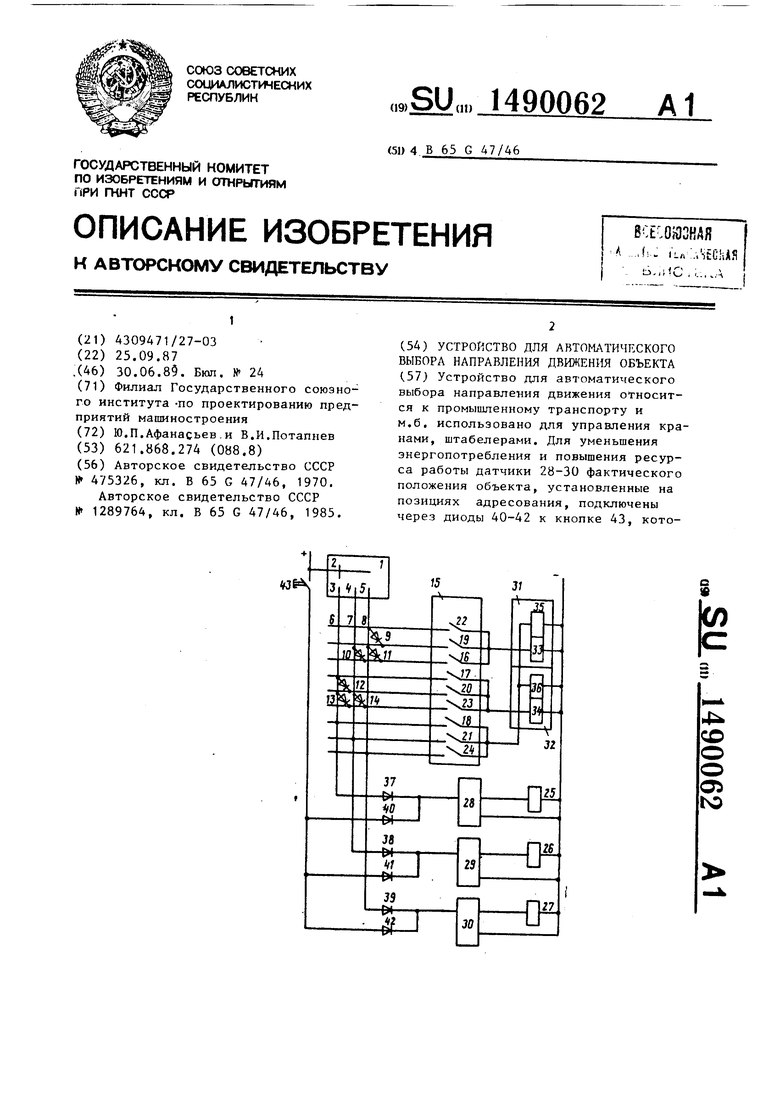
05
ю
3
рая включена в плюсопую шину источника питания. К плюсовой инше источ ника питания подключен подвижн 1Й контакт 2 задатчика 1 адреса. Пепод вижиые контакты 3-5 задатчика 1 под ключеHI.I к пинам адресования (lllA) 6-8. Через диоды 9-13 lllA подключены к блоку 15 фактического положения в виде замыкаюпшх контактов 16-2А промежуточных реле 25-27. Вторые вы воды контактов 16-24 подключены к обмоткам 33-36 поляризованных реле 31,32. Неподвижные контакты ШЛ 6-8 подключены через аноды 37-39 соответственно к датчиками 28-30 фактиИзобретение относится к промышенному транспорту и может быть использовано для управления конвейера- ми, кранами-штабелерами, автооператорами, тележками для межоперационных передач,
Цель изобретения - экономия электроэнергии и повышение ресурса работы,На чертеже приведена электричес- кая принципиальная схема устройства для автоматического выбора направления движения объекта.
Устройство для автоматического выбора направления движения объекта 35 состоит из источника питания постоянного тока, задатчика 1 адреса с подвижным 2 и неподвижными 3-5 контактами, с подключенными к последним шинами 6-8 адресования, которые че- 40 рез диоды 9-11, 12-14 схем совпадения и }1епосредственно подключены к соответствую11а1м первьим выводам блока 15 фактического положения, выполненного в виде замыкаюшд х контактов дЗ 16-18, 19-21, 22-24 соответственно, промежуточных реле 25-27 и бесконтактных датчиков 28-39 положения, двух- обмоточных реле 31 и 32 выбора направления движения, у которых цепи - управления исполнительными обмотками 33 и ЗА подключены к соответствующим вторым выводам замыкающих контактов 16, 19, 23 и 17, 20, 23 блока 15 фактического положения, а цепь управления возвратными обмотками 35 и 36 подключена к вторым выводам замыкающих контактов 18,21,24 блока 15 фактического положения. При этом каждый
90062
ческого положения. При установке требуемого адреса и нажатии кнопки 43 питание поступает через диоды 4042 к датчикам 28-30. Срабатывает
датчик, у которого находится объект, включая соответствующее промежуточное рела 25-27. Замыкаются контакты реле, обеспечивая поступление питания по цепи: соответствующие замкнутые контакты, задатчик адреса, U1A 6-8, разделительные диоды 9-13 к включающей обмотке 33 или 34 поляризованного реле 31 или 32, Движение объектов начинается в требуеном направлении, 1 ил.
10
15
5 0 З
5
бесконтактный датчик 28-30 положения подключе положительным выводом питания через катод-анод соответствующего первого разделительного диода 37-39 к соответствующей этому датчику 28-30 шине 6-8 адресования, а также через катод-анод соответствующего второго разделительного диода 40-42 к первому выводу пусковой кнопки A3, второй вывод которой подключен к подвижному кон гакту 2 задатчика 1 адреса.
Устройство работает следую и 1М образом.
Подвижный KOH j aKT 2 задатчика 1 например, устанавливается на неподвижный контакт 3, а подвижный объект взаимодействует с датчиком 30 положения. При нажатии и удержании пусковор кнопки 43 положительный потенциал источника питания через диоды 40-42 запитывает датчики 28-30 положения. Однако включается только промежуточное реле 27, включенное на выход датчика 30, Его замыкающие контакты 22-24 в блоке 15 фактического положения замыкаются.
Положительный потенциал источника питания черед подвижный 2 и неподвижный 3 контакты задатчика 1, шину 6 адресования, диод 13, контакт 23 проходит на исполнительную обмотку ЗА. Реле 32 выбора направления включается и дает команду на перемещение подвижного объекта. Последний переме щается и при его воздействии на датчик 28 включается реле 25, через замыкающий контакт 18 которог; положительный потенциал с шины 6 проходит на возвратные обмотки 35 и 36. Реле 32 выбора направления отключается и объект прекращает перемещение. Пусковая кнопка ДЗ удерживается нажатой до включения реле 31 или 32,
Таким образом, предлагаемое- устройство обеспечивает импульсную подачу питания на датчики положения для координации объекта при выборе направления его движения, а в последующем оставляет запитанным только датчик места адресации, что позволяет сократить потребление электроэнергии и одновременно увеличить срок службы датчиков положения.
Формула изобретения
Устройство для автоматического выбора направления движения объекта, содержащее задатчик адреса, подвижны контакт которого подключен к плюсовой шине источника питания, а неподвижные контакты - к шинам адресования, к которым через соответствующие элементы совпадения подключены первые выводы блока фактического поло0
5
0
5
жения объекта, вьшолненного в виде замыкающих контактов промежуточных реле и бесконтактных датчиков положения, установленных на позициях адресования с возможностью взаимодействия с объектом, и двухобмоточные реле выбора направления движения, одни выводы обмоток которых подключены к соответствующим другим выводам блока фактического положения, другие выводы обмоток поляризованных реле выбора направления движения и обмоток промежуточных реле подключены к минусовой шине источника питания, отличающееся тем, что, с целью экономии электроэнергии и повьпиения ресурса работы, в него введены пусковая кнопка и две группы разделительных диодов, через первые из которых бесконтактные датчики положения подключены к соответствующим шинам адресования, через вторые - к первому выведу пусковой кнопки,включенной в плюсовую шину источника питания, при этом катоды диодов подклю чены к бесконтактным датчикам положения.
| Устройство для программного реверса движения люлечного конвейера | 1973 |
|
SU475326A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1289764A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
