Изобретение касается измерения параметров движения.
Известен способ определения параметров акселерометра, заключающийся в том, что задают углы отклонения измерительной оси акселерометра от плоскости горизонта путем изменения положения акселерометра, фиксируют его выходные сигналы и определяют параметры акселерометра как линейные комбинации значений его выходных сигналов. Рассмотрим этот способ более подробно. Представим выходную характеристику акселерометра в следующем виде:
U - U0 + KHgsIn a.(1)
U - выходной сигнал акселерометра:
Uo - нулевой сигнал акселерометра;
К(а) - крутизна выходной характеристики акселерометра:
п- угол отклонения от плоскости горизонта измерительной оси акселерометра;
g - ускорение силы тяжести.
Аппроксимируем, например, крутизну выходной характеристики акселерометра полиномом, содержащим члены, пропорциональные не более чем первым степеням ускорения. Из (1) получим:
U U0+Kigslna+K2g2sin2 «+
+ K392sfn a cos a,(2) где Ki, K2, Кз - коэффициенты полинома.
При реализации известного способа задают различные значения углаа. фиксируют
выходные сигналы акселерометра и определяют параметры акселерометра как линейные комбинации значений его выходных сигналов путем решения одним из известных способов относительно параметров акселерометра системы уравнений, составленной из уравнений вида (2) при различных значениях угла а. Причем различные значения угла а выбираются из условия наличия в системе не меньшего количества линейно независимых уравнений, чем количество параметров, аппроксимирующих выходную характеристику акселерометра.
Угол отклонения измерительной оси акселерометра от плоскости горизонта задают с погрешностью:
« Да,
где а - заданное значение угла отклонения измерительной оси акселерометра от плоскости горизонта;
Да- погрешность задания этого угла.
Будем полагать, что величина угла Д а значительно меньше 1 рад. С учетом этого, из (1) приближенно получим:
U U0 + K(a)gsin a + Д a K(a)gcoso . (3)
Наличие в (3) члена ДаК(а)дсозо приводит к погрешностям определения параметров. Для их уменьшения необходимо уменьшать погрешность задания угла of,
Таким образом, недостатком известного способа является то, что высокие требования к точности определения параметров акселерометра обуславливают высокие требования к точности задания углов отклонения измерительной оси акселерометра от плоскости горизонта, что приводит к необходимости применения при определении параметров акселерометров дорогостоящих прецезионных поворотных установок.
Цель изобретения - упрощение способа.
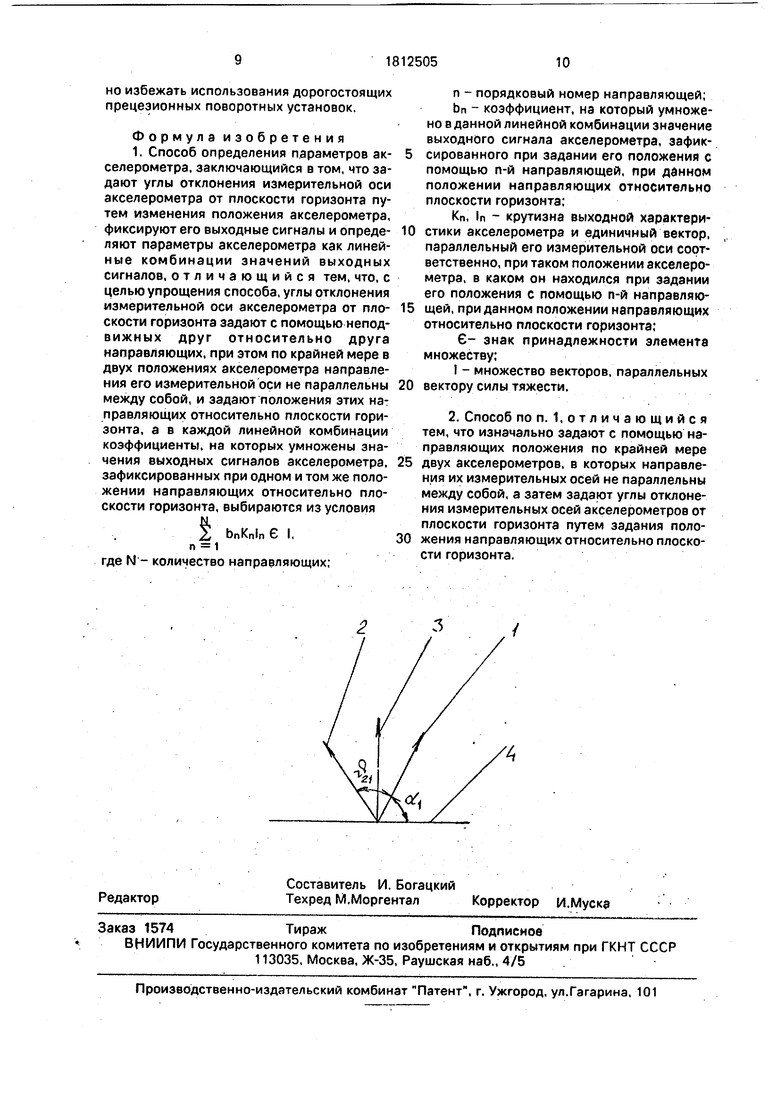
На чертеже изображен один из возможных вариантов расположения измерительной оси акселерометра при задании углов ее отклонения от плоскости горизонта с помощью неподвижных друг относительно друга направляющих. 1 и 2 - единичные вектора, параллельные измерительной оси акселерометра при задании углов ее отклонения от плоскости горизонта с помощью первой и второй направляющей, соответственно, 3-единичный вектор, параллельный вектору силы тяжести, 4-плоскость горизонта. - угол между направлениями измерительной оси акселерометры при задании ее отклонения от плоскости горизонта с помощью первой и второй направляющих, а - угол отклонения от плоскости горизонта измерительной оси акселерометра при за0
5
0
5
0
5
0
5
0
5
дании этого угла с помощью первой направляющей. Для определения параметров акселерометра задают различные положения направляющих относительно плоскости горизонта путем поворота их относительно го- ризонтальной оси, перпендикулярной направлениям измерительной оси акселерометра, задаваемым с помощью этих направляющих (ось поворота направлена перпендикулярно плоскости чертежа).
При использовании двух акселерометров под 1 и 2 следует понимать единичные векторы, параллельные измерительным осям первого и второго акселерометров, соответственно при задании их положения с помощью направляющих; под Vi - угол между измерительными осями первого и второго акселерометров, под а - угол отклонения измерительной оси первого акселерометра от плоскости горизонта. Для определения параметров акселерометров задают различные положения направляющих с установленными на них акселерометрами путем поворота направляющих, как указано выше.
Вектор, параллельный вектору силы тяжести, можно выразить через единичные вектора 1 и 2 при заданном значении угла ai следующим образом:
j--a
COS Oi
И +а
COS «1
l2
(5)
SinV21 Sin V21
где j - вектор, параллельный вектору силы тяжести;
а-длина вектора ;
а2 «1+
11 - единичный вектор 1;
12 - единичный вектор 2.
Определим такую взвешенную сумму выходных сигналов акселерометра, зафиксированных при одном из заданных положений направляющих относительно плоскости горизонта, что выполняется соотношение:
j HbiK (ai) + i2b2K(a2),(6) где И, 12 - единичные вектора, параллельные измерительной оси акселерометра, при задании угла ее отклонения от плоскости гори- зонта с помощью первой и второй направляющей соответственно, при данном положении направляющих относительно плоскости горизонта; bi и Ь2 - коэффициенты во взвешенной сумме выходных сигналов: .
S blUl + D2U2,(7)
где Ui и U2 - значения выходных сигналов акселерометра, зафиксированные при задании угла отклонения его измерительной оси с помощью первой и второй направляющих, соответственно, при данном положении направляющих относительно плоскости горизонта.
При использовании двух акселерометров под DI и U2 будем понимать значения выходных сигналов первого и второго акселерометров, соответственно, а под K(«i) и К(аа) - крутизну их выходных характеристик.
Так как истинное значение крутизны выходной характеристики К(а) не известно, при выборе bi и Ь2 будем использовать номинальное значение этой величины КН(СЕ), а вместо истинных значений углов оп и vji- их заданные значения «1 и V& соответственно.
Положим, например, согласно (5) и (6):
bi
COS ОЙ . COS «1 ,m
KH(«I) (а2) : (Ь)
ГДе О2 «1 - V21.
где - заданное значение угла vi. Преобразуем (7) с учетом (8) и (3): cos С(2
S + K(«i) gsln «1
Кн(«О + (K( «1) - KH(«0) a gcos «1 +
+ (fla)gsln-Q z +
+ (K(«z) - Кн(«2)) A CKI gcos «2 +
+ gcos 0:1 cos «2.(9) где ba - погрешность задания угла а
A - погрешность задания угла 1-21 при изготовлении направляющих:
Ааг- Aai + .
При реализации предлагаемого способа задают различные положения направляющих относительно плоскости горизонта, задают с помощью направляющих углы отклонения измерительной оси-акселерометра путем перестановки его с одной направляющей на другую, фиксируют его выходные сигналы и определяют параметры акселерометра как линейные комбинации значений его выходных сигналов путем решения одним из известных способов относительно параметров акселерометра системы уравнений, составленной из уравнений вида (9) при различных заданных положениях направляющих относительно плоскости горизонта, величина S в которых при этих положениях определяется согласно выражениям (7) и (8)..Причем различные заданные положения соединены относительно плоскости горизонта выбираются из условия наличия в системе не меньшего количества линейно независимых уравнений, чем количество параметров функции, аппроксимирующей выходную характеристику акселерометра. Из решения системы уравнений вида (9) параметры акселерометра будут определяться как линейные комбинации взвешенных сумм (7), удовлетворяющих
(6). Из последнего утверждения и из выражения (6) следует, что при реализации пред- лагаемого способа параметра акселерометра определяются как линейные 5 комбинации значений его выходных сигналов, в каждой из которых коэффициенты, на которые умножены значения выходных сигналов акселерометра, зафиксированных при одном и том же положении направляю0 щих относительно плоскости горизонта, выбираются из условия (4).
При использовании двух акселерометров взвешенные суммы (7), удовлетворяющие (6), формируются из значений
5 выходных сигналов первого и второго акселерометров, а в уравнения вида (9) входят в качестве неизвестных параметры как первого, так и второго акселерометров. Решение системы управлений (9) относительно неиз0 вестных параметров позволяет определить их как линейные комбинации, также удовлетворяющие указанному выше условию.
Из выражения (9) следует, что во взвешенной сумме (7), по сравнению с выраже5 нием (3), относительный вес слагаемых, содержащих погрешности задания с помощью направляющих углов отклонения из- мерительной оси акселерометра от плоскости горизонта A«i, А аг уменьшился
0 по сравнению с относительным весом других слагаемых, содержащихся в (3), в (K(«i) - KH(«i))/K(«i) и (К(«2) - КН(«2))/К(«2) раз, соответственно. Обычно KH(«i) и Кн( G5) очень близки к K(«i) и К(«2) и коэффициенты {K(#i)
5 - Кн( «i)/K(ai) и (К(«2) - Кн( «2))/К(«2) будут значительно меньше единицы, и, следовательно, влияние Дат и АОЙ на погрешности определения параметров будет незначительным. Величина угла не изменяет0 ся при задании различных положений направляющих относительно плоскости горизонта, так как направляющие неподвижны друг относительно друга. Поэтому величину угла можно определить, как
5
и параметры акселерометра, путем решения системы уравнений вида (9) относительно и исключить влияние угла на. погрешности определения параметров акселерометра. Таким образом, при реализа0 ции предлагаемого способа влияние погрешностей задания угла отклонения измерительной оси акселерометра на погрешности определения параметров будет значительно меньше, чем при реализации
известного способа. Кроме того, не требуется и высокая точность задания углов между направлениями измерительной оси акселерометра при ориентации ее с помощью направляющих, так как влияние погрешностей
задания этих углов на погрешности определения параметров можно исключить.
Если измерительная ось акселерометра ориентируется с помощью направляющих в параллельных между собой направлениях, выбрать коэффициенты веса во взвешенных суммах (7) таким образом, чтобы выполнялось соотношение (6), можно только для двух положений соединения направляющих: когда измерительная ось акселерометра ориентируется с их помощью вертикально вверх, либо вертикально вниз. Поэтому в этом случае невозможно получить необходимое число линейно независимых уравнений вида (9) для определения всех параметров акселерометра. Следовательно, измерительная ось акселерометра должна ориентироваться с помощью первой и второй направляющих в непараллельных между собой направлениях.
Аппроксимируем крутизну выходной характеристики акселерометра полиномом, содержащим члены, пропорциональные не более чем первым степеням ускорения. Выходная .характеристика акселерометра будет при этом иметь вид (2). Примем далее, что Л vz 90°, KH(«i) М«2) Кн. Тогда, если пренебречь членами, содержащими Лол и Дай , выражение (9) примет вид
S- -Д- (sin «1 + cosm) U0 +
+ Kig + (sin3 «1 + cos3 ai)K2g2 +
+ sin «1 cos си x
x (sin a - cosai )Кзд21+
+ gsin a cosai .
В качестве заданных значений угла ai примем следующие: 0,45°, 90°. 135°, 180°, 225°, 270°, 315°. Для этих значений угла а система уравнений связи параметров S и искомых параметров акселерометра примет вид
J Кн
(Uo + Kig +K2g2):
l( + Kig + ЩK
K2g2 +
+ ):
1 KH
(-Uo + Kig-Kag2): J-HSTUo + KigК-нZ.
K2g2 +
(U0 + Kig + K2g): -(Kig- :уК3д2-|кнД 1д);
KH Avaig); 1
S270
KH
(-U0 + Kig -
S315 -j (Kig + j. K3g2 - К„ ).
где Syr значение параметра S, соответствующее значению угла at равному р , определяемое по выходным сигналам акселерометра в соответствии с выражениями (7) и (8):
U2.o. „.. V2
0
5
0
5
0
0
5
S0
(U1.45+U2.45);
КГ - 2Кн
$90 :8135 -(Ul.135-U2.135):
Sl80
- 2.180.
2Кн
5225 . U 1,270.
v51 2Кн
(U 1.225 +
5
0
5
+ U2.225); S270
r 14H
5315 (U 1.315 -U2.315),
где Ui .и U2 .у- выходные сигналы акселерометра, зафиксированные при задании угла отклонения его измерительной оси от плоскости горизонта с помощью первой и второй направляющих, соответственно, при таком положении соединения направляющих относительно плоскости горизонта, при котором заданное значение угла а равно р.
Решая данную систему уравнений относительно неизвестных параметров акселерометра методом наименьших квадратов, получим следующие выражения для оценок искомых параметров:
Uo (Ul.45 + U2.45 + U1.225 + U2.225) -,
- 2 (U2.0 + Ul,90 + U2.180 + U1,270); K1 - ft (U1.45 + U2.45 + U 1.135 og 2
-U2.135 - U 1.225 - U2.225 U 1.315 + U2.315) + + U2.0 + Ul.90 U2.180 - Ur, 1
K2
2g
U2.0 + Ul.90 + U2.180 + Ul.270
-(Ul,45 + U2.45 + U 1,225 + U2.225);
Л1
Кз ---5-(U2,315 + U2,135-Ul.315
2gz
-U1.135).
Оценка технической эффективности предлагаемого способа определения параметров акселерометров показывает, что для достижения той же точности определения параметров, что и при реализации известного способа, при реализации предлагаемого способа можно снизить требования к точности задания углов отклонения измерительной оси акселерометра от плоскости горизонта от единиц угловых секунд до единиц угловых минут, т.е. в 60 - 100 раз. Таким образом при реализации предлагаемого способа, в отличие от известного, можно избежать использования дорогостоящих прецеэионных поворотных установок.
Формула изобретения 1. Способ определения параметров акселерометра, заключающийся в том, что задают углы отклонения измерительной оси акселерометра от плоскости горизонта путем изменения положения акселерометра, фиксируют его выходные сигналы и определяют параметры акселерометра как линей- ные комбинации значений выходных сигналов, отличающийся тем, что. с целью упрощения способа, углы отклонения измерительной оси акселерометра от плоскости горизонта задают с помощью неподвижных друг относительно друга направляющих, при этом по крайней мере в двух положениях акселерометра направления его измерительной оси не параллельны между собой, и задают положения этих направляющих относительно плоскости горизонта, а в каждой линейной комбинации коэффициенты, на которых умножены значения выходных сигналов акселерометра, зафиксированных при одном и том же положении направляющих относительно плоскости горизонта, выбираются из условия
Ё
bnKnin 6 I, п 1
где N - количество направляющих;
п - порядковый номер направляющей; Ьп - коэффициент, на который умножено в данной линейной комбинации значение выходного сигнала акселерометра, зафик- 5 сированного при задании его положения с помощью n-й направляющей, при данном положении направляющих относительно плоскости горизонта;
Kn, In - крутизна выходной характери- 0 стики акселерометра и единичный вектор, параллельный его измерительной оси соответственно, при таком положении акселерометра, в каком он находился при задании его положения с помощью n-й направляю- 5 щей, приданном положении направляющих относительно плоскости горизонта;
6- знак принадлежности элемента множеству;
I - множество векторов, параллельных 0 вектору силы тяжести.
2, Способ по п. 1,отличающийся тем, что изначально задают с помощью направляющих положения по крайней мере
5 двух акселерометров, в которых направления их измерительных осей не параллельны между собой, а затем задают углы отклонения измерительных осей акселерометров от плоскости горизонта путем задания поло0 жения направляющих относительно плоскости горизонта.

Использование: измерительная техника, проверка и градуировка акселерометров. Сущность изобретения: проверку акселерометра осуществляют путем установки его в различные строго определенные положения и снятия его выходных сигналов. Способ включает операции: задание углов отклонения измерительной оси акселерометра от плоскости горизонта, фиксацию выходных сигналов акселерометра и определение его параметров как линейных комбинаций его выходных сигналов. При этом задают положение относительно плоскости горизонта направляющих, жестко соединенных между собой, для ориентации с их помощью измерительной оси акселерометра в направлениях, по крайней мере два из которых не параллельны между собой, а углы отклонения измерительной оси акселерометра задают с .помощью этих направляющих и определяют параметры акселерометра как линейные комбинации его выходных сигналов, в каждой из которых Для каждого из заданных положений соединения направляющих относительно плоскости горизонта, при которых фиксировались выходные сигналы, входящие в данную линейную комбинацию, выполняется определенное условие. 1 з.п. ф-лы, 1 ил. с/ С
| Авторское свидетельство СССР № | |||
| Способ определения нулевого сигнала линейного акселерометра | 1985 |
|
SU1379744A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Быценко А.В | |||
| и др | |||
| Датчики и методы повышения их точности | |||
| Киев | |||
| В.шк., 1989, с | |||
| Кузнечный горн | 1921 |
|
SU215A1 |
