Изобретение относится к области измерения и может быть использовано для настройки и калибровки акселерометров и приборов, содержащих акселерометры.
Известен способ градуировки вертикальных акселерометров, см., например, описанный в [1] , включающий задание входного воздействия на акселерометр, путем осуществления гармонических угловых колебаний и соответствующие развороты измерительной оси акселерометра с одновременным наблюдением выходного сигнала.
Однако данный способ подразумевает изначальное знание угловых координат оси измерения датчика и позволяет повысить точность градуировки путем исключения погрешности от поперечной составляющей.
Известен способ определения параметров прецизионных акселерометров, в частности погрешности базовых установочных элементов и угловой деформации основания в плоскости, перпендикулярной оси его вращения - прототип, описание которого приведено в [2]. Данные параметры можно перевести в угловые координаты относительно ортогонального базиса X, Y, Z, зная ориентацию посадочных мест акселерометра относительно данного базиса. Сущность данного способа заключается в том, что проводят развороты акселерометра, закрепленного на вертикальном основании, вокруг горизонтальной оси и вокруг измерительной оси на некоторые, заранее заданные углы, измеряют сигналы с акселерометра и после этого вычисляют погрешность базовых установочных элементов - координаты измерительной оси акселерометра.
Однако способ требует проведения вращения вокруг измерительной оси акселерометра, что возможно легко реализовать для измерения параметров отдельного акселерометра или одноосного прибора. В случае прибора с несколькими несоосными акселерометрами требуется проводить вращения вокруг нескольких осей, что требует наличия очень сложного и точного оборудования для осуществления как поворотов, так и измерения углов этих поворотов, и может оказаться неприемлемым.
Задача изобретения - упрощение способа, большая информативность и увеличение экономичности.
Эта задача достигается тем, что в способе определения угловых координат измерительной оси акселерометра относительно ортогонального базиса X, Y, Z, включающем первый и второй развороты вокруг горизонтальной оси, расположенной в плоскости горизонта XOY, дополнительно первый разворот акселерометра из начального положения вокруг первой оси OA1, расположенной под углом ϕ1 к оси X базиса, проводят на угол λ1, при котором сигнал акселерометра равен нулю, после чего из начального положения производят второй разворот акселерометра вокруг второй оси OA2, расположенной в плоскости XOY под углом ϕ2 к оси X, на угол λ2, при котором сигнал акселерометра равен нулю, а угловые координаты α,β, и γ определяются из соотношений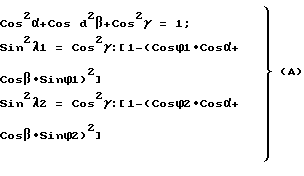
На чертеже представлена ортогональная система координат OXYZ и орт e, заданный углами α,β и γ, которые он образует с положительными направлениями осей OXYZ. Плоскость, заданная векторами  , образует прямой угол с плоскостью OXY. Векторы
, образует прямой угол с плоскостью OXY. Векторы  и
и  принадлежат плоскости OXY и образуют углы ϕ1 и ϕ2 с вектором
принадлежат плоскости OXY и образуют углы ϕ1 и ϕ2 с вектором  соответственно. В этом случае угол δ, образованный векторами
соответственно. В этом случае угол δ, образованный векторами  , можно выразить как:
, можно выразить как:
Cosδ = Cosϕ1·Cosα+Cosβ·Sinϕ1 ....(1)
Это следует непосредственно из скалярного произведения единичных векторов 
Рассмотрим прямоугольный сферический треугольник A1BC. В нем гипотенуза c = δ, катет a = 90o - γ Исходя из формулы синусов (Sina/SinA1 = Sinc/SinC), получим:
Sina = Sinc · SinA1...(2)
Учитывая, что Sina = Sin (90o - γ ) = Cos γ, выражение (2) примет вид: Cos γ = Sin δ · SinA1, принимая обозначение SinA1 = Sin λ1, где λ1 - угол поворота, далее запишем это выражение как:
Sinλ1 = Cosγ/Sinδ ...(3)
Выразив Sin δ как (1-Cos2 δ )0,5 и подставив значение Cos δ из соотношения (1), выражение (3) примет вид: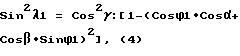
Подставив соответствующие углы λ2 и ϕ2 в данное выражение, получим третье уравнение предлагаемой системы уравнений для определения координат измерительной оси акселерометра: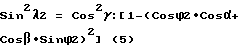
Определение угловых координат α,β и γ измерительной оси e акселерометра осуществляется следующим образом. Пусть поворотная установка имеет платформу, которую можно горизонтировать и устанавливать на нее акселерометр (прибор, в котором установлены акселерометры). Поворотная установка имеет две измерительные оси вращения OA1 и OA2 с точной фиксацией углов поворота, расположенные под углами ϕ1 и ϕ2 относительно оси X. Выставим плоскость OXY поворотной установки в горизонт. Повернем платформу относительно оси OA1 на угол λ1, при котором сигнал акселерометра равен нулю. Зафиксируем угол λ1. Установим акселерометр (прибор) в исходное положение (выставим плоскость OXY поворотной установки в горизонт). Повернем платформу относительно оси OA2 на угол  при котором сигнал акселерометра равен нулю. Зафиксируем угол λ2. Подставим значения ϕ1,λ1 и ϕ2,λ2 в равенства (4) и (5), получим систему уравнений (A), которые и определяют угловые координаты α,β и γ измерительной оси акселерометра e в исходном базисе X, Y, Z.
при котором сигнал акселерометра равен нулю. Зафиксируем угол λ2. Подставим значения ϕ1,λ1 и ϕ2,λ2 в равенства (4) и (5), получим систему уравнений (A), которые и определяют угловые координаты α,β и γ измерительной оси акселерометра e в исходном базисе X, Y, Z.
Эффект от использования предлагаемого способа заключается в том, что он проще известного, т.к. для определения угловых координат акселерометра требуется всего два поворота последнего, в то время как в прототипе требуется проводить 4 поворота. Кроме этого, предложенный способ имеет большую информативность, т. к. для определения координат по нему не требуется изначальное знание примерного положения измерительной оси, в то время как у способа-прототипа необходимо проводить вращение вокруг последней на 180 градусов, а значит и предварительно знать ее положение.
Вместе с тем предложенный способ позволяет увеличить экономичность определения координат измерительной оси за счет того, что можно отказаться от сложного оборудования и использовать оборудование, в котором возможен наклон прибора вокруг горизонтальной оси и разворот прибора на произвольный угол вокруг вертикальной оси. Так, в случае, если необходимо провести измерение параметров нескольких акселерометров, установленных в приборе, например, 3-х для создания ортогонального базиса или 6-и для высокорезервированных систем, включающих два ортогональных базиса, развернутых друг относительно друга, для обеспечения защиты от 2-х отказов в системе, то для обеспечения всех поворотов вокруг измерительных осей каждого акселерометра при реализации способа-прототипа потребуется очень сложное оборудование, имеющее соответствующее число степеней свободы (осей вращения), что делает его очень дорогим и предназначенным только для одного типа приборов. При использовании универсального оборудования (дающего возможность проводить вращение в трех взаимно перпендикулярных осях) потребуются очень сложные и трудоемкие действия, например одновременное вращение вокруг нескольких осей, что приведет к снижению точности из-за суммирования погрешностей измерения углов при очень большом объеме вычислений, что делает стоимость проверки очень большой при высокой вероятности ошибок. Поэтому в случае применения акселерометров, не имеющих нулевой составляющей сигнала (сигнал акселерометра равен нулю при отсутствии ускорения), предлагаемый способ является оптимальным, а при малосерийном производстве приборов, когда нет возможности под каждый прибор изготавливать сложное технологическое оборудование, и единственно возможным.
Точность определения угловых координат будет зависеть от точности фиксации углов ϕ1, ϕ2 и λ1,λ2 и точности проведения вычислений. Учитывая уровень современной техники точность вычислений, может быть сколь угодно высокой и не влияет на точность определения угловых координат α,β и γ. Точность фиксации углов может составлять единицы дуговых секунд, что и определяет точность искомых угловых координат α,β и γ, таким образом точность предложенного способа и прототипа равнозначны.
В случае, когда есть возможность провести ориентацию исходного состояния прибора на поворотной установке по одной оси базиса (например X, т.е. угол ϕ1 = 0o), второе выражение исходной системы уравнений примет вид:
Sinλ1 = Cosγ/Sinα.
Предлагаемая совокупность признаков в рассмотренных авторами решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень".
Для реализации данного способа необходима платформа с не менее чем двумя рамками карданного подвеса (двумя степенями свободы), например, такая как представлена в [3] страница 158. Для удобства наклона платформы в положение, при котором сигнал акселерометра равен нулю, можно использовать последние с системой автоматического горизонтирования, такие, например, как представлены в [3] страница 207.
Литература
[1] - Авторское свидетельство СССР N 1742734 A1 от 20.11.89. Способ градуировки вертикальных акселерометров. G 01 P 21/00.
[2] - Патент Российской Федерации N 02117950 от 20.08.98. Способ определения параметров прецизионных акселерометров. G 01 P 21/00.
[3] - Савант С.Дж., Ховард Р., Соллоуай С., Савант С.А. Принципы инерциальной навигации. Издательство "Мир", 1965 г.
Способ может быть использован для настройки и калибровки акселерометров и приборов, содержащих акселерометры. Производят первый и второй развороты акселерометра из начального положения вокруг осей, расположенных в плоскости горизонта, на заданные углы, при которых сигнал акселерометра равен нулю. Угловые координаты относительно ортогонального базиса определяют из приведенных в описании соотношений. Обеспечивается упрощение способа, большая информативность и увеличение экономичности. 1 ил.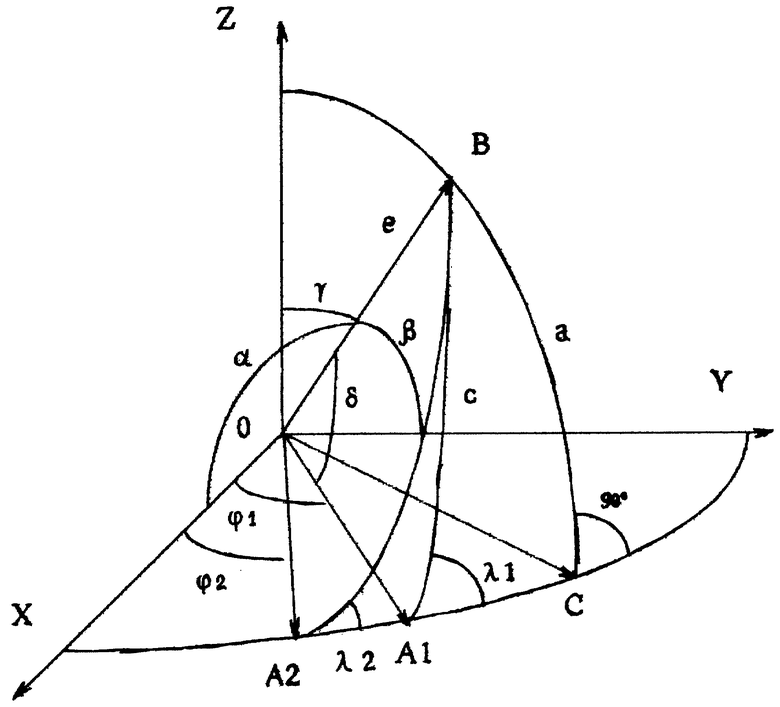
Способ определения угловых координат измерительной оси акселерометра относительно ортогонального базиса X, Y, Z, включающий первый и второй развороты вокруг горизонтальной оси, расположенной в плоскости горизонта XOY, отличающийся тем, что первый разворот акселерометра из начального положения вокруг первой оси OA1, расположенной под углом ϕ1 к оси X базиса, проводят на угол λ1, при котором сигнал акселерометра равен нулю, после чего из начального положения производят второй разворот акселерометра вокруг второй оси OA2, расположенной в плоскости XOY под углом ϕ2 к оси X, на угол λ2, при котором сигнал акселерометра равен нулю, а угловые координаты α, β и γ определяются из соотношений
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННЫХ АКСЕЛЕРОМЕТРОВ | 1994 |
|
RU2117950C1 |
| Способ определения параметров акселерометра | 1990 |
|
SU1812505A1 |
| Способ определения нулевого сигнала линейного акселерометра | 1985 |
|
SU1379744A1 |

