Изобретение относится к электротехнике и может быть использовано для стабилизациичастоты вращения однодвйгательного электропривода.
Цель изобретения - повышение точности быстродействия и упрощение устройства.
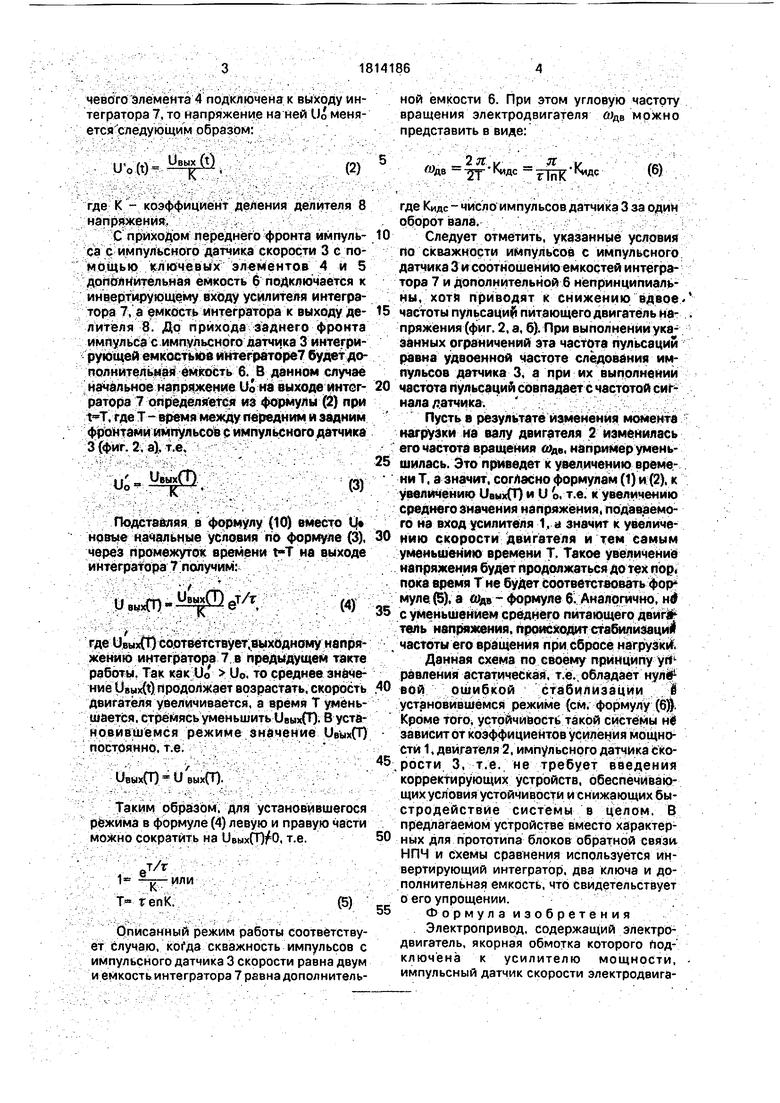
На фиг. 1 представлена блок-схема электропривода; на фиг. 2 - временные диаграммы его работы, где Q -скважность, С, Се - емкость интегратора и дополнительная емкость соответственно.
Устройство содержит последовательно соединенные усилитель мощности 1, двигатель 2, импульсный датчик 3 скорости, ключевые элементы 4 и 5, дополнительную емкость 6, интегратор 7 и делитель напряжения 8, причем выход интегратора 7 объединен с его входом 9, входом усилителя 1 мощности и входом делителя 8 напряжения. . Вход делителя 8 соединен с первыми неподвижными контактами ключевых элементов 4 и 5. Вторые неподвижные контакты элементов 4 и 5, подключены к неинвертирующему входу усилителя интегратора 7, один вывод дополнительной емкости 6 соединен с заземленным выводом емкости интегратора 7, второй вывод емкости б соединен с подвижным контактом ключевого элемента 4, второй вывод емкости интегратора 7 - с подвижным контактом элемента 5, управляющие входы ключевых элементов 4, 5 подключены к выходу импульсного датчика скорости 3.
Устройство работает следующим образом. В начальный момент (положение ключевых элементов 4, 5 соответствует фиг. 1) за счет наличия малого .смещения U0 на выходе интегратора 7 его интегрирующая емкость начинает заряжаться. Учитывая, что вход и вУход интегратора объединены, его выходное напряжение U вых(1) можно записать в виде:
00
S
00 ON
UBbix(t) Uoe
t/r
О)
где г-постоянная времени интегратора, t- время. Это напряжение подается через усилитель мощности 1 на двигатель 2 и последний начинает вращаться. Так как дополнительная ёмкость 6 с помощью ключевото элемента 4 подключена к выходу интегратора 7, то напряжение на ней Uo меня- ется следующим образом:
ной ёмкости 6. При этом угловую частоту вращения электродвигателя й)дв можно представить в виде: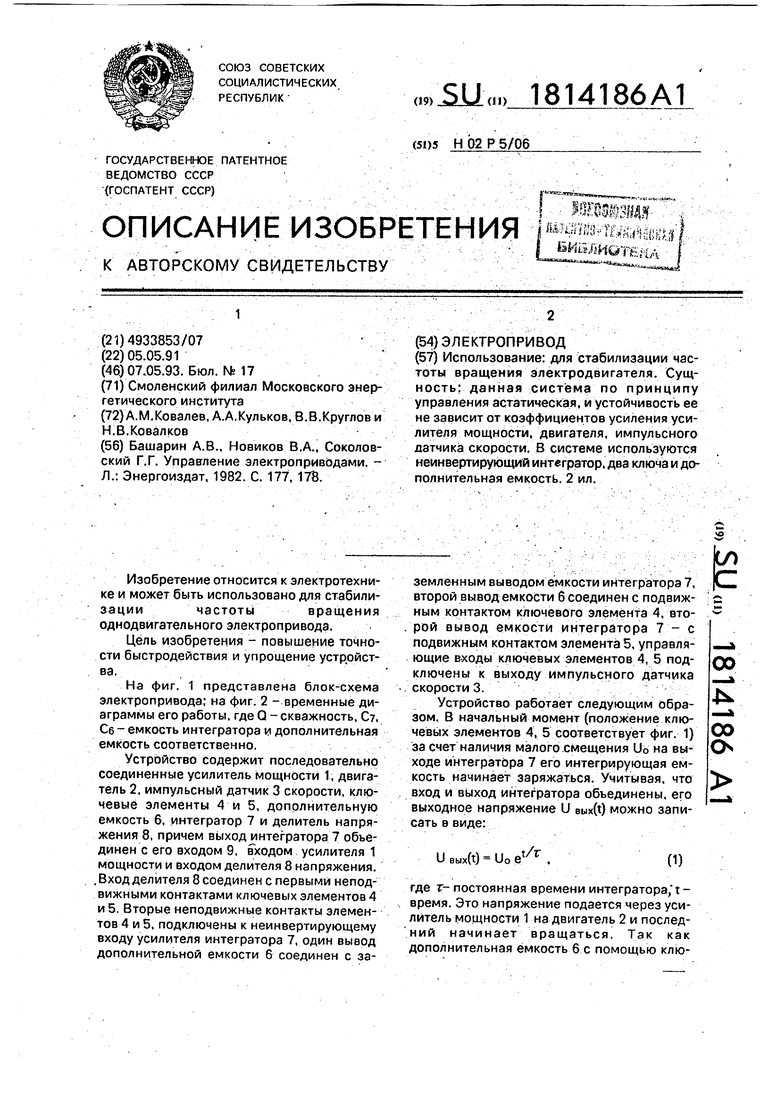
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
| Мультивибратор | 1978 |
|
SU738107A1 |
| Импульсный регулятор перемещенияпьЕзОдВигАТЕля | 1979 |
|
SU847270A1 |
| Мультивибратор | 1979 |
|
SU871305A2 |
| КОРРЕКТОР КОЭФФИЦИЕНТА МОЩНОСТИ | 2011 |
|
RU2473109C1 |
| Параметрический импульсный стабилизатор постоянного напряжения | 1980 |
|
SU935929A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| КЛЮЧЕВОЙ СТАБИЛИЗАТОР | 1991 |
|
RU2011275C1 |
| Устройство для измерения скольжения электрической машины | 1985 |
|
SU1288888A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
Использование: для стабилизации частоты вращения электродвигателя. Сущность: данная система по принципу управления астатическая, и устойчивость ее не зависит от коэффициентов усиления усилителя мощности, двигателя, импульсного датчика скорости. В системе используются неинвертирующий интегратор, два ключа и дополнительная емкость. 2 ил.
UV(t)
UBb.x(t)
К,..,
(2)
где К - коэффициент деления делителя 8
;;нэттря енйя:,.Л . - - .,; С npirtxo|joM переднего фронта импульса с импульсного датчика скорости 3 с;по- Мощью ключевых элементов 4 и 5 доНЬвнитёльиая ёмкость 6 подключается к инверт14рующ1ему входу усилителя интегратора 7, а емкость интегратора к выходу делителя 8. До прихода заднего фронта импул ьса с импульсного датчика 3 интегри- рующей емкостьюв интеграторе будет дополнительная емкость 6. В данном случае начальное напряжение Uo на выходе интегратора 7 определяется из формулы (2) при , где Т -время междупередними задним фронтами импульсов с импульсного датчика 3(фиг.2,аХт.е;.. /-/;: . ; -:
U
вых
ж
(3)
Подставляя в формулу (10) вместо II новые начальные условия по формуле (3), через промежуток времени t-T на выходе интегратора 7 получим:
Цвых(
аТ/Г
(4У
где ивыхШсоответствует.выходному напряжению интегратора 7 в предыдущем такте работы. Так как;11о Uo. то среднее значение КвыхО) продолжает возрастать, скорость двигателя увеличивается, а время Т уменьшается, стремясь уменьшить ивых(Т)-в установившемся режиме значение иВых(Т) постоянно,т.е. .. - -
UB«x(T) и выхГП.:
Таким рбразом, Для установившегося режима в формуле (4) левую и правую части можно сократить на иВых(Т)0, т.е.
е
Т/г
К trenk;
или
(5)
Описанный режим работы соответствует случаю, когда скважность импульсов с импульсного датчика 3 скорости равна двум и емкость интегратора 7 равна дополнитель 1п v
ГУдв - -туу- идс -
я FlflT
где Кидс-число импульсов датчика 3 за один
Оборот Вала.., ;.; .;:.:: :... , Л
Следует отметить, указанные условия по скважности импульсов с импульсного датчика 3 и соотношению емкостей интегратора 7 и дополнительной 6 непринципиальны, хотя приводят к снижению вдвое.
частоты пульсаций питающего двигатель напряжения (фиг. 2, а, б). При выполнений указанных ограничений эта частота пульсации равна удвоенной частоте следования импульсов датчика 3, а при их выполнении
частота пульсаций совпадает с частотой сигнала датчика. ... ;.; :.: У/;.--.X :;;Л/.: Пусть в результате изменения момента нагрузки на валу двигателя 2 изменилась его частота вращения одв, например уменьшилась. Это приведет к увеличению време- ни Т, а значит, согласно формулам (1) и (2), к увеличению иВых{Т)и U о, т.е. к увеличению среднего значения напряжения, подаваемого на вход усилителя 1, а значит к увеличению скорости двигателя и тем самым уменьшению времени Т. Такое увеличение напряжения будет продолжаться до тех пор, пока время Т не будет соответствовать фор муле. (5), а 0)лъ - формуле 6. Аналогично, нд с уменьшением среднего питающего двигав тель напряжения, происходит стабилизации частоты его вращения при сбросе нагрузка. Данная схема по своему принципу уrtL равления астатическая, т.е.,обладает нуле1 вой ошибкой стабилизации | установившемся режиме (см, формулу (6)|. Кроме того устрйчйвостб такой системы н$ зависит от коэффициентов усиления мощности 1, двигателя 2, импульсного датчикаско- рости 3, т.е. не требует введения корректирующих устройств, обеспечивающих условия устойчивости и снижающих быстродействие системы в целом. В предлагаемом устройстве вместо характерных для прототипа блоков обратной связи. НПЧ и схемы сравнения используется инвертирующий интегратор, два ключа и дополнительная емкость, что свидетельствует о его упрощении.
Ф о р мула изобретения Электропривод, содержащий электродвигатель, якорная обмотка которого подключена к усилителю мощности, импульсный датчик скорости электродвига
теля, о т л «о щ и и с я тем, что, с целью его упрощения, повышения точности и быс- тродействия, в него введены интегратор, делителе напряжения, конденсатор и два ключевых aneMeHta, причем выход интеграг тора объединен с его входом, входом делителя напряжений и входом усилителя мощности, выход делителя напряжения со- единен с первыми неподвижными ((онтакта- м и ключевых элементов, вторы
не(1одвШные контакты элементов подключены icинвертирующему входу интегра- тбра.одинвывод.конденсатора обьединен с выводом конденсатора Интегратор ключей к общей шине; вторые выводы каж- дого ко ;й н.т Ь р;а -... с йо вйжйй и кл(очевых1элё ейтов, а управляк щйё входь ключевых эдементов подключены к выходу импульсного датчика скбррст
| Башарин А.В., Новиков В.А., Соколовский Г.Г | |||
| Управление электроприводами | |||
| - Л.: Энергоиздат, 1982 | |||
| С | |||
| Кулисный парораспределительный механизм | 1920 |
|
SU177A1 |
