Изобретение относится к Теплоэнергетике и может быть использовано при автоматизации управления технологическими процессами.
Предлагаемый способ управления базируется на построении математического эквивалента датчика контролируемого параметра, учитывающего возможные дрейфы наиболее характерных параметров, и использовании вместо показаний временно отказавшего датчика показаний его программного эквивалента. Это одновременно позволяет сохранить работоспособность системы регулирования при эпизодических самоустраняющихся отказах датчика и импульсных помехах и повысить точность управления.
Рассмотрим в качестве примера идентификации неизвестных параметров детерминированную совместную идентификацию текущего наклона расходной характеристики регулирующей клапана К и постоянной времени исполнительного органа Т регулятора уровня.
Для такого объекта линеаризованные уравнения состояния представимы в виде
I
Х-КУ+А;
ф,
иг1,
(1)
te
где X - регулируемый уровень;
W - положение регулирующего клапана;
U - ± 1, 0 - широкомодулированный сигнал управления.
При условии постоянства возмущения А после выдачи управляющего воздействия длительностью т можно сформировать следующие алгоритмы детерминированной идентификации неизвестных параметров Т и К
f - гДУ1
K (Xi-Xo) ДТ1
где ДФ- наблюдаемое изменение положения исполнительного органа;
СО СП
со
СА VI
Хо - значение X перед выдачей управляющего воздействия:(
Xi - установившееся значение X после выдачи управляющего воздействия.
В более сложных случаях существования измерительных помех и непостоянства возмущений данные алгоритмы дополняются соответствующими алгоритмами усреднения по результатам оценок на нескольких интервалах управления.
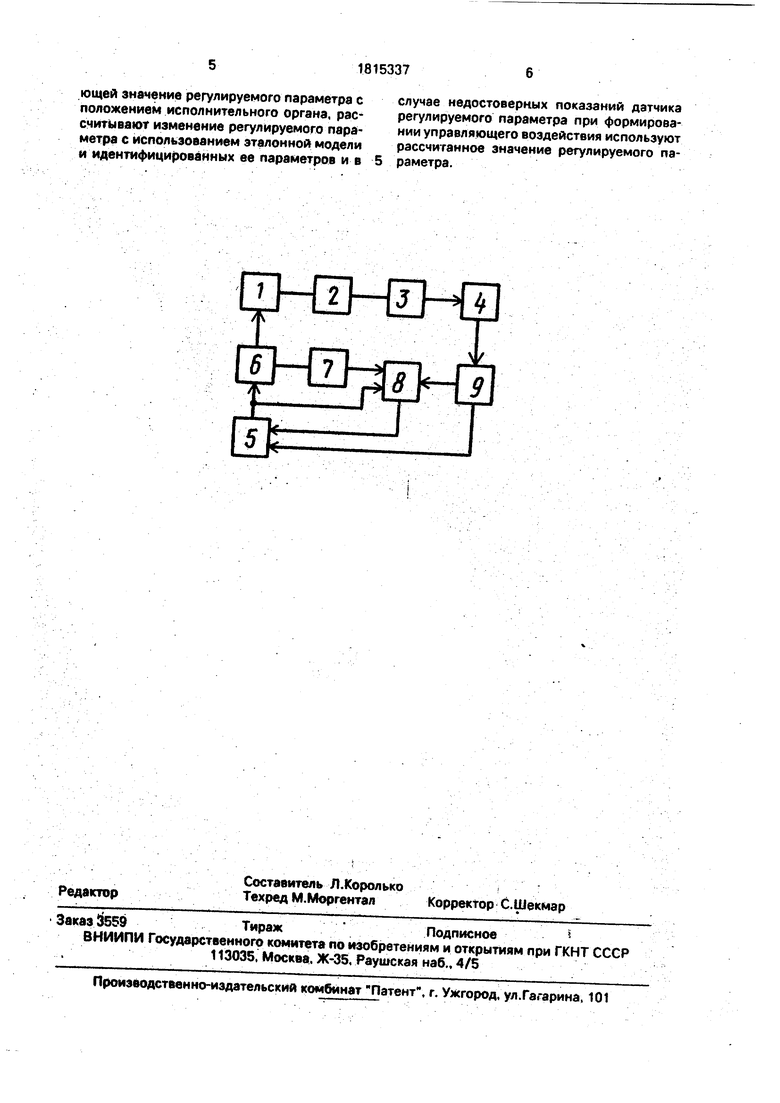
На чертеже приведен пример блок-схемы устройства для осуществления предлагаемого способа.
Устройство содержит объект 1 регулирования (например, подогреватель паровой турбины), датчик 2 регулируемых параметров (например, уровня конденсата в подогревателе паровой турбины), подключенный через дифференциатор 3 к преобразователю 4 выходного сигнала регулируемого параметра, регулятор 5, подключенный через йсполнйтельный орган 6 к объе кту 1 регули- рования, датчик 7 положения исполнительного органа 6, эталонную модель 8 объекта регулирования, выключатель 9,
Вход выключателя 9 подключен к выходу преобразователя 4 выходного сигнала,а первый и второй выходы соответственно к входу регулятора 5 и первому входу эталонной модели 8, второй и третий входы которой соединены соответственно с выходом регулятора 5 и датчиком 7 положения исполнительного органа 6, а выход эталонной модели 8 подключен к входу регулятора 5.
Способ осуществляется.следующим образом.
При регулировании параметров технологического объекта 1 формируют датчиком 2 регулируемого параметра сигнал по выходному параметру объекта регулирования и контролируют достоверность показаний датчика 2 регулируемого параметра: непрерывно измеряют с помощью дифференциатора 3 скорость изменения регулируемого параметра, в преобразователе 4 сравнивают скорость изменения регулируемого параметра с уставками по минимуму и максимуму.
Значения уставок выбираются таким образом, чтобы обеспечить передачу без искажения полезного сигнала с выхода датчика 2 регулируемого параметра и устранение (сглаживание) импульсных помех в выходном сигнале.
Если скорость изменения регулируемого параметра не выходит за пределы минимальной и максимальной уставок, сигнал с выхода преобразователя 4 через выключатель 9 поступает на регулятор 5, который
формирует управляющий сигнал на исполнительный орган 6.
При этом после выдачи управляющего сигнала идентифицируют параметры эталонной модели 8, связывающей значения регулируемого параметра с положением исполнительного органа: измеренное датчиком 7 положения значение положения исполнительного органа б и управляющий
0 сигнал с выхода регулятора 5 поступают на входы эталонной модели 8 и используются для расчета изменения регулируемого параметра.
В случае, если скорость изменения ре5 гулируемого параметра больше максимальной уставки или меньше минимальной у ставки, при формировании регулирующего воздействия используют рассчитанное эталонной моделью 8 значение: сигнал с выхо0 да преобразователя 4 переключает выключатель 9, и на первый вход эталонной модели 8 поступает со второго выхода выключателя 9 сигнал, разрешающий прохождение сигнала с выхода эталонной модели 8
5 на вход регулятора 5.
Таким образом, в процессе регулирования осуществляется оценка достоверности показаний датчика регулируемого параметра и использование его достоверных пока0 заний для формирования управляющего воздействия, при недостоверности показаний датчика регулируемого параметра управляющее воздействие формируется с использованием значения, рассчитанного с
5 помощью эталонной модели, связывающей значения регулируемого параметра с показателями датчика положения исполнительного органа.
При этом обеспечивается высокое каче0 ство регулирования за счет передачи без искажения полезного сигнала, устранения импульсных помех в выходном сигнале и аномальных ошибок измерения, сохранения работоспособности при эпизодических
5 самоустраняющихся отказах датчиков. Ф о р м у л а и з о б р е т е н и я Способ регулирования параметров технологического оборудования машзала энергоблока атомной электростанции путем
0 измерения регулируемого параметра, определения его скорости, контроля с помощью преобразователя достоверности показаний датчика регулируемого параметра и подачи преобразованного сигнала через эталонную
5 модель на вход регулятора, формирующего управляющее воздействие на исполнительный орган, отличающийся тем. что, с целью повышения точности, после выдачи управляющего воздействия идентифицируют параметры эталонной модели, связывающей значение регулируемого параметра с положением исполнительного органа, рассчитывают изменение регулируемого параметра с использованием эталонной модели и идентифицированных ее параметров ив
случае недостоверных показаний датчика регулируемого параметра при формировании управляющего воздействия используют рассчитанное значение регулируемого параметра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ многосвязного управления технологическими процессами с прогнозированием | 2023 |
|
RU2826858C1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОВАЛЬНОЙ ТУРБОГЕНЕРАТОРНОЙ УСТАНОВКОЙ СО СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ (ВАРИАНТЫ) | 2006 |
|
RU2314635C1 |
| УСТРОЙСТВО БЫСТРОДЕЙСТВУЮЩЕЙ СЕЛЕКТИВНОЙ ЗАЩИТЫ ОТ ОДНОФАЗНЫХ ЗАМЫКАНИЙ НА ЗЕМЛЮ В РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЯХ С ВОЗМОЖНОСТЬЮ БЕЗАВАРИЙНОГО ВВОДА РЕЗЕРВА | 2009 |
|
RU2410812C2 |
| Устройство для адаптивного управленияпОзициОННыМ элЕКТРОпРиВОдОМ | 1978 |
|
SU798708A1 |
| СИСТЕМА АДАПТИВНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТЬЮ КУСТА ГАЗОВЫХ СКВАЖИН | 2014 |
|
RU2559268C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ РАСПЛАВА И ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ЭКСТРУДЕРА ОТ ПЕРЕГРЕВАНИЯ | 2003 |
|
RU2239557C1 |
| СПОСОБ АНТИПОМПАЖНОГО РЕГУЛИРОВАНИЯ КОМПРЕССОРНОЙ СТАНЦИИ | 2001 |
|
RU2210008C2 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2501964C1 |
| Система регулирования турбины | 1977 |
|
SU661122A1 |
Использование: теплоэнергетика при автоматизации управления технологических процессов. Сущность изобретения: после выдачи управляющего сигнала идентифицируют параметры эталонной модели, связывающей значения регулируемого параметра с положением исполни тельного органа. В случае, если скорость изменения регулируемого параметра больше максимальной установки или меньше минимальной уставки, при формировании управляющего воздействия используют рассчитанное эталонной моделью значение. 1 ил.
| Способ регулирования турбины | 1985 |
|
SU1312190A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
