(54) УСТРОЙСТВО ДЛЯ АДАПТИВНОГО УПРАВЛЕНИЯ bi Ш ПОЗИЦИОННЫМ ЭЛЕКТРОПРИВОДОМ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования положения | 1990 |
|
SU1795416A1 |
| Устройство управления позиционнымэлЕКТРОпРиВОдОМ | 1979 |
|
SU798695A1 |
| Устройство для управления позиционным электроприводом | 1973 |
|
SU528542A1 |
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Цифровой позиционный электропривод | 1981 |
|
SU1029366A1 |
| Устройство для управления позиционным электроприводом | 1981 |
|
SU993199A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1990 |
|
RU2037869C1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Электропривод | 1985 |
|
SU1350803A1 |
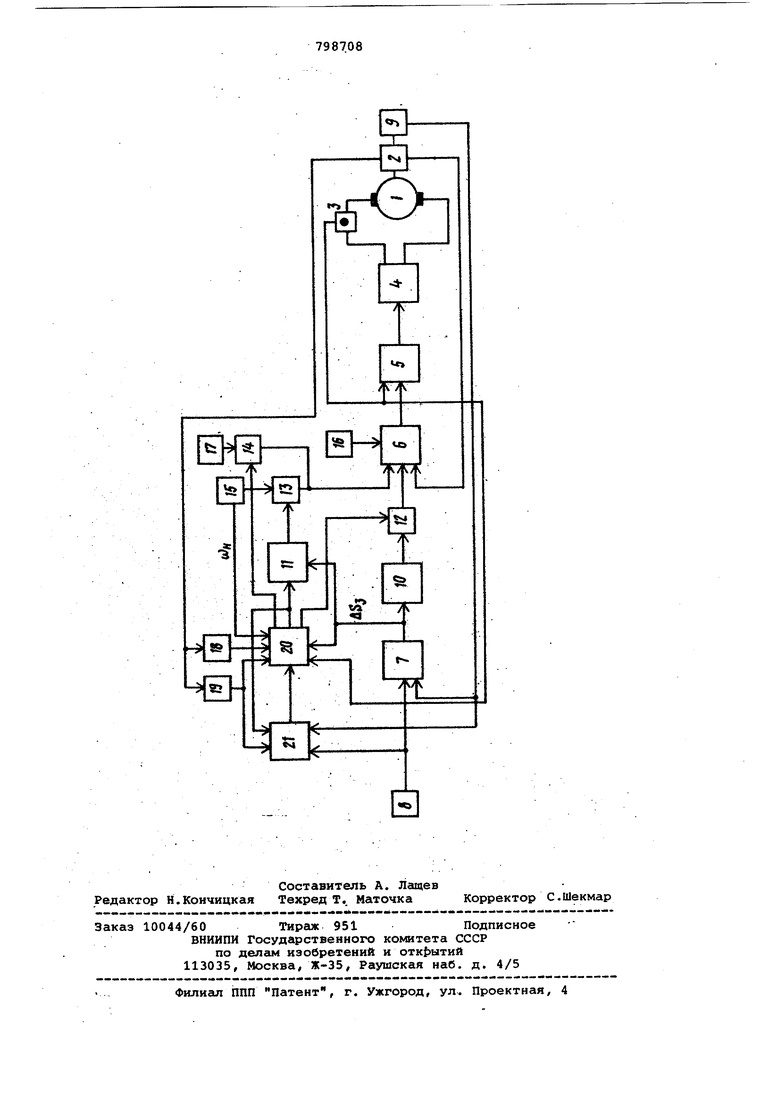
Изобретение относится к области автоматического управления электропроводами и может быть использовано в системах позиционного электропривода. Известно устройство управления по зиционным электроприводом, в Котором повышение точности позиционирования достигается путем поддержания угла торможения неизменным независимо от статического момента и инерционных масс подвижных частей механизм Определение значения тсч мозного момента в этом устройстве выполняется .схемой обработки информации в процес се перемещения исполнительного органа на установившейся скорости 1. Однако такое устройство не позволяет определить тормозной путь, который обеспечил бы при разнозамед ленном движении, останов исполнительного -органа в тот момент, когд отработанный путь равен заданному. Кроме того, устройство обеспечивает заданную точность позиционирования только при наличии установившейся скорости движений исполнительного органа и при отсутствии внешних возмущений. Наиболее близким по технической сущности к предлагаемому устройству является устройство управления позиционным электроприводом, содержащее последовательно соединенные регулятор скорости, регулятор тока второй вход которого соединен с датчиком тока, усилитель мощности, выходы которого непосредственно и через датчик тока соединены со входами электродвигателя, вал которого кинематически связан с датчиками скорости и положения, выход датчика скорости соединен с первым входом регулятора скорости, выход датчика положения соединен с одним из входов первого блока сравнения, другой вход которого соединен с блоком задания перемещения, а выход - со входом регулятора положения и первым входом второго блока сравнения, выход регулятора положения соедаснен со входом первого ключа, выход которого соединен со вторым входом регулятора скорости, выход второго блока сравнения соединен с управляющим входом второго ключа, вход которого соединен с задатчиком номинальной скорости, а выход - с третьим входом регулятора скорости, токоограничивающий вход которого соединен с задатчиком полного момента. Повьдшение точности позиционирования и качества регулирования в это устройстве достигается путем исключения влияния несоответствия законов изменения пути и скорости при ограничении производной пути по времени, на протекание процесса при отработке кадра перемещения. Исключение этого влияния обеспечивается размыканием контура положения системы при отработке перемещения, а определение времени начала торможения выполняетс схемой обработки информации о скорос ти, пусковом и статическом моментах привода, а также об оставшемся значении отработки пути исполнительного органа. Но такое устройство не позволяет определить с необходимой точностью путь равнозамедленного движения при изменении маховых масс подвижных час тей механизма в различных кадрах отработки перемещений. Кроме того, не учитывается изменение параметров, входящих в устройство, которое вносит погрешность в точность отработки перемещений и определяемый путь равн замедленного движения. Цель изобретения - повышение точности позиционирования и качества регулирования. Эта цель достигается тем, что в устройстве адаптивного управления по зиционным электроприводом установлен задатчик ползучей скорости, третий ключ, пороговый элемент, датчик уско рения, модель процесса позиционирова ния, и вычислительный блок, первый вход которого соединен с выходом задатчика номинальной скорости, второй - с выходом порогового элемента, третий - с выходом датчика ускорения четвертый - с выходом модели процесса позиционирования, пятый - с выход датчика тока, шестой - с выхрдом пер вого блока сравнения, а первый выход соединен с управляющим входом треть го ключа, второй - со ВТОЕНЛМ входом второго блока сравнения и с первым входом модели процесса позиционирования, третий - с управляющим входом первого ключа, второй вход модели, процесса позиционирования соединен с выходом блока задания перемещения, третий - с выходом датчика положения четвертый - с выходом порогового элемента, входы порогового элемента и датчика ускорения соединены с выходом датчика скорости, а выход задатчика ползучей скорости соединен с входом третьего ключа, выход которого соединен с третьим входом рагулятора скорости. На чертеже представлена блок-схем предлагаемого устройства. Устройство содержит электродвигатель 1, датчик 2 СКОРОСТИ, датчик .3 тока, усилитель 4 мощности, регулятор 5 тока, регулятор 6 скорости, первый блок 7 сравнения, блок 8 задания перемещения, датчик 9 положения, регулятор 10 положения, второй блок 11 сравнения, ключи первый 12, второй - 13, третий - 14, задатчик 15 но иинальной скорости, задатчик 16 полного момента, зада.тчик 17 ползучей скорости, датчик 18 ускорения, пороговый элемент 19, вычислительный блок 20, модель 21 процесса , позиционирования.- Предсказание пути торможения до пол ной остановки электродвигателя 1 при отработке перемещений определяется во время разгона электродвигателя 1 на основании информации,существующей в системе в это время. Причем,путь торможения при отработке перемещений треугольным графиком изменения скорости электродвигателя определяется выражением с - П ст и 1 - Н-2К;; 1 а при отработке трапецеидальным графиком изменения скорости - выражением - ст . I/ «п + Ме-г где М,,и Mj, - соответственно полный и статический момент электродвигателя , д.5, - заданное изменение положения рабочего органа; путь разгона до номинальной скорости электродвигателя;К и уточняющие коэффициенты. Зависимости (1) и (2) реализуются вычислительным блоком 20, т.е. подачей на его вход сигнала, пропорционального заданию изменения положения рабочего органа с выходом первого блока 7 сравнения, сигнала, пропорционального полному и статическому моментам электродвигателя 1 с выхода датчика 3 тока в различное время процесса, а также сигналов, пропорциональных уточняющим коэффициентам, поступающим с выхода модели процесса позиционирования 21. Кроме того„ вычислительным блоком 20 определяется значение пути разгона до номинальной скорости электродвигателя 1 согласно выражению 2 Sp« 2ёГ. в котором уставка .номинальной скорости электродвигателя 1, поступающая с выхода задатчика 15 номинальной скорости, а сигнал, пропорциональный ускорению разгона 6р , поступает с выхода датчика 18 ускорения. Уточнение модели 21 процесса позиционирования выполняется после отработка заданного перемещения в процессе самообучения системы на основании предсказанного пути торможения в данном кадре отработки перемещения, поступающего с выхода вычислительного блока 20, а также сигналов, поступающих с выхода датчика 9 положения и с выхода блока 8 задания перемещения.
Устройство работает следуюищм . образом.
При подаче сигнала на отработку необходимого перемещения от блока 8 задания перемещения на выходе первого блока 7 сравнения, который может быть дискретно-аналоговым прерОразователем или сельсинной парой С фазочувствительным выпрямителем, возникает сигнал изменения положения рабочего органа, который поступает на входы второго блока 11 сравнения и вычислительного блока 20 (который совместно с моделью 21 процесса позиционирования может быть микропроцессором либо малой управляющей машиной). По уровню этого сигнала вычислительный блок 20 определяет принадлежность его к большим или малым заданиям изменения положения рабочего органа. Если вычислительным блоком зафиксировано малое задание изменения положения рабочего органа, то им же устанавливается заведомо большое -значение предсказываемого пути торможения, чем достигается выдача нулевого сигнала с выхода второго блока 11 сравнения на управляющий вход второго ключа 13, который отключает задатчик 15 номинальной скорости (источник напряжения) от входа регулятора 6 ско рости. Кроме того, вычислительный блок 20 выдает единичный сигнал на управляющий вход первого ключа 12, чем выполняется подключение выхода регулятора 10 положения ко входу регулятора 6 скорости, и нулевой сигнал, на управляющий вход третьего ключа 14, чем выполняется отключение задатчика 17 ползучей скорости (источник напряжения) от входа регулятора 6 скорости. Этими воздействиями вычислительного блока 20 обеспечивается отработка малых заданий изменения положения рабочего органа последовательно соединенными регуляторами 5 тока, скорости 6, положения 10. Если вычислительным блоком 20 зафиксировано большое задание изменения положения рабочего органа, т им организуется пробное движение рабочего органа на ползучей скорости электродвигателя 1, в процессе которого запоминается в вычислительном блоке 20 сигнал, пропорциональный статическому моменту электродвигателя 1, поступающий от датчика 3 тока. Для организации пробного движения вычислительным блоком 20 устанавливается заведомо большое значение предсказываемогопути торможения, чем достигается вьвдача нулевого сигнала с выхода второго блока 11 сравнения на управляющий вход второго ключа 13, который отключает задатчик 15 номинсшьной скорости от входа регулятора 6 скорости. Кроме того, вычислительный блок 20 подает нулевой сигнал на управляющий-ВХОД первого ключа 12, чем выполняется отключение выхода регулятора.10 положения от входа регулятора б скорости и единичный сигнал на управляющий вход третьего ключа 14, чем выполняется подклюoчение задатчика 17 ползучей скорости ко входу регулятора 6 скорости. После запоминания статического момента электродвигателя 1 вычислительным блоком 20 устанавливается нулевое значение
5 предсказываемого значения пути торможения, чем обеспечивае-тся выдача единичного сигнала с выхода второго блока 11 сравнения на управляющий вход второго ключа 13, подключающего задатчик 15 номинальной ско0рости ко входу регулятора 6 скорости. Кроме того, вычислительный блок 20 падает нулевой сигнал на управляющий вход третьего ключа 14, отключающий задатчик 17 ползучей ско5рости от входа регулятора 6 скорости. На основании сигнала,пропорционального ускорению электродвигателя 1, поступающего от датчика 18 ускорения, и сигнсша, пропорционального
0 номинальной скорости электродвигателя 1, поступающего с задатчика 15 номинальной скорости, вычислительным блоком 20 определяется путь разгона до номинальной скорости электро5двигателя 1. Вычислительным блоком 20 на основании сигнала, пропорционального полному моменту, поступающего от датчика 3 тока, и данных о статическом моменте и пути разгона до
0 номинальной скорости электродвигателя 1, находя1дахся в памяти вычислительного блока 2О, а также няющего коэффициента, поступагадего с выхода модели 21, им определяется путь торможения электродвигателя
5 1 от номинсшьной скорости до полной остановки. После этого вычислительный блок 20 выполняет сложение пути разгона до номингшьной скорости электродвигателя 1 и пути торможе0ния электродвигателя 1 от номинальной скорости до полной остановки, а также сравнение .этой суммы с заданным изменением положения рабочего органа, поступающего от первого
5 блока 7 сравнения. При этом,если указанная сумма меньше заданного изменения пути, то предсказание пути торможения определяется вычислительным блоком 20 согласно выражению (2), если больше - согласно выражению (1).
0 После этого значение предсказываемого пути торможения передается на вход второго блока 11 сравне ния. При достижении равенства оставшегося значения отработки пути, посту5паюсдего с выхода первого блока 7 сравнения, и предсказанного пути тор можения - с выхода второго блока 11 сравнения, на управляющий вход второго ключа 13 поступает нулевой сигнал, обеспечивающий отключение эадатчика 15 номинальной скорости от входа регулятора 6 скорости, В результате этого электродвигатель 1 переводится в режим равнозамедленного торможения. После остановки электродвигателя 1 срабатывает пороговый элемент 19, по сигналу которого при необходимости, выполняется уточнение модели 21 процесса позиционирования, а также сигналом с вычислительного блока 20 вы1ПОЛНЯСТСЯ.воздействие на управляющий вход первого ключа 12, в результате чего выход регулятора 10 положения подключается ко входу регулятора б скорости. Предлагаемое устройство улучшает качество регулирования в статике и динамике, т.е. обеспечивает повышение точности установки механизма в заданное положение бе.з перерегули рования и дотягивания. Кроме того, , способность устройства приспосабливаться к изменившимся условиям (дрей параметров блоков, воздействие помех изменение показаний датчиков и т.п. обеспечивает нечувствительность сие темы к этим изменениям. Все это обес печивает оптимальную работу механиз мов с использованием предлагаемого устройства. Формула изобретения Устройство для адаптивного управления позиционным электроприводом, содержащее последовательно соединенные регулятор скорости, регулятор то ка, второй вход которого соединен с выходом датчика тока, усилитель мсицности, выходы которого непосредственно и через датчик тока соединены с входами электродвигателя, вал кото рого кинематиче.ски связан с датчиком скорости и положения, выход датчика скорости соединен с первым входом регулятора скорости, выход датчика положения соединен с одним из входов первого блока сравнения, другой вход которого соединен с выходом блока задания перемещения, а выход - со входом регулятора положения и первым входом второго блока сравнения, выход регулятора положения соединен со входом первого ключа, выход которого соединен со вторым входом регулятора скорости, выход второго блока сравнения соединен с управляющим входом второго ключа, вход которого соединен с задатчиком номинальной скорости, а выход - с третьим входом регулятора скорости, токоограничивающий вход которого соединен с задатчиком полного момента, отличающееся тем, что, с целью повышения точности устройства, в нем установлены задатчик ползучей скорости, третий ключ, пороговый элемент, датчик ускорения, модель процесса позиционирования и вычислительный блок, первый вход которого соединен с выходом задатчика номинальной скорости, второй - С- выходом порогового элемента, третий - с выходом датчика ускорения, четвертый - с выходом модели процесса позиционирования, пятый с выходом датчика тока, шестой - с выходом первого блока сравнения, а первый выход соединен с управляющим 1входом третьего ключа, второй - со вторым входом второго блока сравнения и с первым входом модели процесса позиционирования, третий - с управляющим входом первбго ключа, второй вход модели процесса позиционирования соединен с выходом блока задания перемещений, третий - с выходом датчика положения, четвертый - с выходом порогового элемента, входы порогового элемента и датчика ускорения соединены с выходом датчика скорости, а выход задатчика ползучей скорости соединен с входом третьего ключа, выход которого соединен с третьим входом регулятора скорости. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 452803, кл. G 05 В 11/01, 1974. 2.Авторское свидетельство СССР 528542, кл. G 05 В 11/01, 1976 (прототип).
