Изобретение относится к области теплоэнергетики и может быть использовано при автоматизации регулирования уровня жидкости в конденсаторе паровой турбины и других резервуарах.
Цель изобретения - повышение точности регулирования.
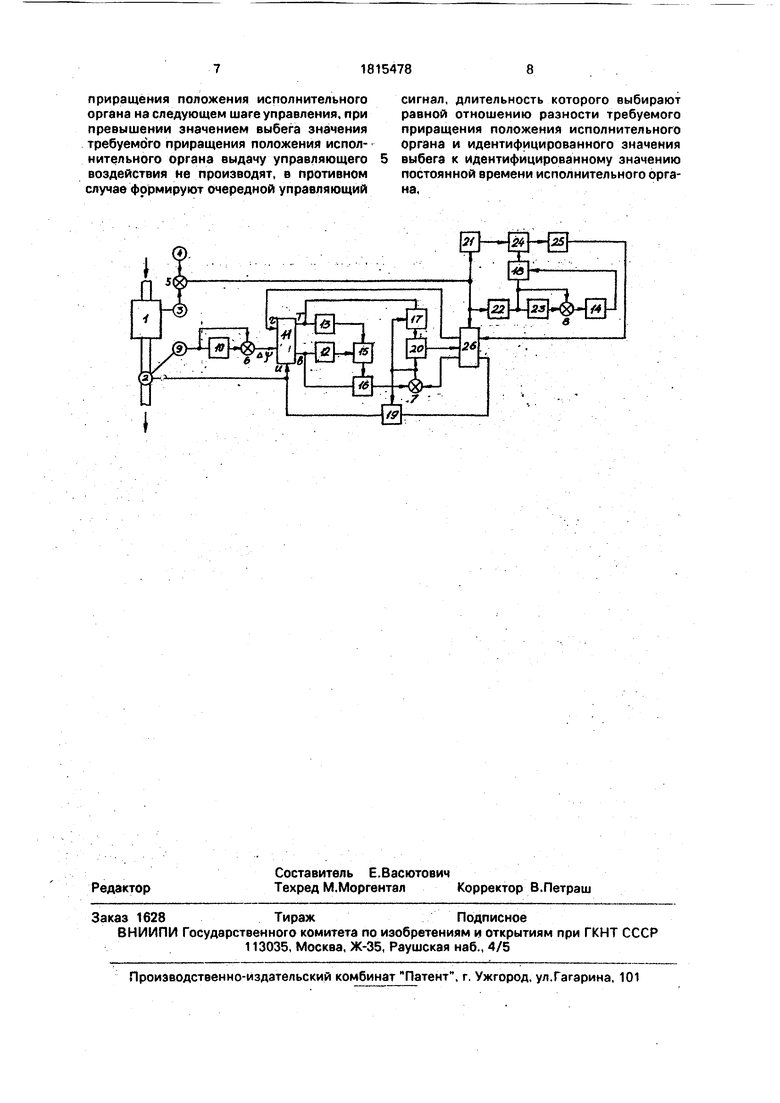
На чертеже приведен пример блок-схемы устройства для осуществления предлагаемого способа. . , .
Устройство для регулирования уровня жидкости в конденсаторе 1 паровой турбины посредством исполнительного органа 2 содержит датчик 3 текущего уровня, задатчик 4 уровня, первый, второй, третий, четвертый 5, 6,7,8 элементы сравнения, датчик 9 положения исполнительного органа, эле мент 10 памяти, вычислительное устройство 11, первый, второй, третий пороговые элементы 12, 13, 14, элемент 15 И, первый, второй, третий; четвертый ключевые элементы 16, 17, 18, 19, формирователь.20 длительности импульсов/дифференциатор 21, формирователь 22 модуля входного сигнала, элемент 23 задержки, делитель 24, инвертор 25, регулятор 26.
Первый и второй входы элемента 5 сравнения подключены соответственно к выходу
00
-л
ел VI
00
датчика 3 текущего уровня и задатчику 4 уровня, а выход - к входу дифференциатора 21, выход которого соединен с первым входом делителя 24, входу формирователя 22 модуля входного сигнала и первому входу регулятора 26. Выход формирователя 22 модуля входного сигнала связан с первым входом четвертого элемента 8 сравнения, через элемент 23 задержки со вторым входом четвертого элемента 8 сравнения, выход которого подключен через третий пороговый элемент 14 к управляющему входу третьего ключевого элемента 18, и через третий ключевой элемент 18 -со вторым входом делителя 24, выход которого через инвертор 25 подключен ко второму входу регулятора 26, управляющий выход которого через четвертый ключевой элемент 19 связан с исполнительным органом 2, К исполнительному органу 2 подключен датчик 9 положения, выход которого связан с первым входом второго элемента 6 сравнения и через элемент 10 памяти со вторым входом элемент 6 сравнения, выход которого подключен к первому входу вычислительного устройства 11, второй выход которого связан с первым информационным выходом регулятора 26, а первый выход через первый ключевой элемент 16с первым входом третьего элемента 7 сравнения и через первый пороговый элемент 12с первым входом элемента 15 И. Второй выход вычислительного устройства 11 через второй ключевой элемент 17 подключен к первому входу формирователя 20 длительности импульсов и через второй пороговый элемент 13 ко второму входу элемента 15 И, выход которого соединен с управляющим входом первого ключевого элемента 16.
Второй информационный выход регулятора 26 подключен ко второму входу третьего элемента 7 сравнения, выход которого соединен с управляющими входами второго 17 и четвертого 19 ключевых элементов и вторым входом формирователя 20 длительности импульсов, выход которого подключен к третьему входу регулятора 26.
Устройство осуществляет способ регулирования уровня жидкости в конденсаторе паровой турбины следующим образом. Датчиком 3 уровня измеряют текущий уровень конденсата, определяют отклонение текущего уровня от заданного задатчиком 4 уровня с помощью первого элемента 5 сравнения, с выхода которого на первый вход регулятора 26 поступает сигнал, используемый регулятором при формировании очередного управляющего сигнала.
Определяют скорость отклонения с помощью дифференциатора 21. Направление изменения модуля отклонения определяется следующим образом: формирователь 22 модуля входного сигнала преобразует поступающий на его вход сигнал по отклонению в сигнал по модулю отклонения,
который затем сравнивается в четвертом элементе 8 сравнения с сигналом по модулю отклонения, который задерживается элементом 23 задержки на заданное время (длительность задержки выбирают минимально возможной при условии превышения разностью между текущим и задержанными сигналами по модулю отклонения величины погрешности датчика уровня), и при превышении сигналом по текущему модулю отклонения задержанного сигнала третий пороговый элемент 14 формирует на выходе постоянный сигнал, соответствующий увеличению модуля отклонения, который, поступая на управляющий вход третьего ключевого элемента
18, разрешает формирование делителем 24 корректирующего сигнала, который через инвертор 25 поступает на второй вход регулятора 26.
Так как исполнительные органы представляют собой механизмы с нерегулируемой постоянной скоростью положения и практически все имеют медленно меняющиеся выбеги и постоянные времени, упрощенное уравнение, определяющее положение
исполнительного органа на каждом шаге управления, может быть представлено в виде:
V VJ -i+Ui-i (b+ri-iT 1).
где I - индекс шага управления;
чр- положение исполнительного органа;
и - управляющий сигнал (0, ± 1);
т- длительность управляющего сигнала;
b - выбег исполнительного органа; Т- постоянная времени исполнительного органа.
Длительность управляющих импульсов т в процессе функционирования регулятора постоянно варьируется, а величина выбега в течение длительного времени может считаться постоянной. Вследствие этого имеется принципиальная возможность оценки величины выбега b и постоянной времени Т по известным значениям величины у; и г.
После выдачи регулятором 26 каждого управляющего воздействия измеряют положение исполнительного органа 2 с помощью датчика 9. сравнивают его во втором элементе 6 сравнения с предыдущим значением положения исполнительного органа, запомненным элементом 10 памяти (значения, запоминаемые элементом 10 памяти, обновляются после выдачи очередного управляющего воздействия). Значение приращения положения А т/1 ч/. 1/. - i исполнительного органа 2 с выхода второго элемента 6 сравнения поступает на первый вход вычислительного устройства 11, на второй вход которого поступает сигнал, соответствующий длительности управляющего сигнала, с первого информационного выхода регулятора 26. Вычислительное устройство 11 осуществляет идентификацию значений постоянной времени Т и выбега исполнительного органа Ь, используя для определения измененные значения приращения положения исполнительного органа и длительность предыдущего управляющего импульса.
Идентифицированные значения выбега b и постоянной времени Т поступают с первого и второго соответственно выходов вьи числительного устройства 11 на первый и второй пороговые элементы 12 и 13 и сравниваются с заданными пороговыми значениями.
Только в случае невыхода за заданные пределы значений постоянной времени и выбега сигналы с выходов первого 12 и второго 13 пороговых элементов поступают на первый и второй входы элемента 15 И, сигнал с выхода элемента И 15 поступает на управляющий вход первого ключевого элемента 16, замыкаетего и разрешает прохождение сигнала (соответствующего выбега) с первого выхода вычислительного устройства на первый вход третьего элемента 7 сравнения. В третьем элементе 7 сравнения происходит сравнение идентифицированного значения выбега с прогнозируемым регулятором 26 значением приращения положения исполнительного органа, поступающим на второй вход элемента 7 сравнения со второго информационного выхода регулятора 26.
.Если идентифицированное значение выбега не превышает значения требуемого регулятором 26 приращения положения исполнительного органа 2, сигнал, равный разности требуемого приращения положения и выбега, с выхода третьего элемента 7 сравнения поступает на управляющий вход четвертого ключевого элемента 19 и замыкает цепь прохождения управляющего сигнала с управляющего выхода регулятора 26 на исполнительный орган 2. При этом сигнал с выхода третьего элемента 7 сравнения поступает на второй вход формирователя 20 длительности импульса и на управляющий вход второго ключевого элемента 17. вызывая прохождение сигнала (соответствующего идентифицированному значению постоянной
времени) со второго выхода вычислительного устройства 11 на первый вход формирователя 20 длительности импульса, который формирует длительность очередного управ- 5 ляющего импульса равной отношению раз- . ности требуемого приращения положения исполнительного органа и идентифицированного значения выбега к идентифицированному значению постоянной времени 0 исполнительного органа 2.
В противном случае, если идентифицированное значение выбега превышает значение требуемого регулятором 26 приращения положения исполнительного органа 2, сиг- 5 нал с выхода третьего элемента 7 сравнения не поступает на управляющие входы второго 17 и четвертого 19 ключевых элементов, цепь прохождения управляющего сигнала не замыкается и выдачу управляющего сиг- 0 нала не производят.
Таким образом, в процессе регулирования уровня жидкости в конденсаторе паровой турбины идентифицируются постоянная времени и выбег исполнительного органа, сво- 5 евременная оценка которых позволяет более точно формировать законы регулирования и блокировать выдачу управляющих сигналов при выходе идентифицированных значений за технологически допустимые пределы. 0 Данное техническое решение предполагается использовать при проектировании регуляторов уровня жидкости в конденсаторе паровой турбины. Такие регуляторы входят в состав разрабатываемых и изготавливаемых 5 обьединением автоматизированных систем управления турбиной АЭС.
Формула изобретения Способ регулирования уровня жидкости в конденсаторе паровой турбины, путем из- 0 мерения отклонения текущего значения уровня от заданного, его скорости и изменения модуля отклонения и при увеличении модуля отклонения регулируют уровень изменением положения исполнительного ор- 5 гана по управляющему воздействию от регулятора, учитывающего величину и скорость отклонения, отличающийся тем, что. с целью повышения точности, после выдачи каждого управляющего воздействия 0 идентифицируют значения постоянной времени и выбега исполнительного органа, сравнивают эти значения с заданными пороговыми значениями и при выходе значений постоянной времени и выбега за пределы, 5 заданные пороговыми значениями, выдачу управляющего сигнала не производят, при не выходе данных значений за указанные пределы перед выдачей управляющего воздействия сравнивают идентифицированное значение выбега со значением требуемого
приращения положения исполнительного органа на следующем шаге управления, при превышении значением выбега значения требуемого приращения положения исполсигнал, длительность которого выбирают равной отношению разности требуемого приращения положения исполнительного органа и идентифицированного значения
нительного органа выдачу управляющего5 выбега к идентифицированному значению
воздействия не производят, в противномпостоянной времени исполнительного оргаслучае формируют очередной управляющийна,
сигнал, длительность которого выбирают равной отношению разности требуемого приращения положения исполнительного органа и идентифицированного значения
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования уровня жидкости в резервуаре | 1988 |
|
SU1679470A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| Устройство для регулирования давления | 1984 |
|
SU1190370A1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144691C1 |
| Система автоматического управления процессом получения сернистого газа в производстве серной кислоты | 1989 |
|
SU1641770A1 |
| Резервированная система автоматического управления | 1982 |
|
SU1113778A1 |
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
Использование: теплоэнергетика и может быть использовано при автоматизации регулирования уровня жидкости в конденсаторе паровой турбины и других резервуарах. Сущность изобретения: идентифицируют значение постоянной времени и выбега исполнительного органа. Сравнивают эти значения с заданными пороговыми значениями, При выходе значений постоянной времени и выбега за пределы, заданные пороговыми значениями, выдачу управляющего сигнала не производят. При невыходе данных значений за указанные пределы перед выдачей управляющего воздействия сравнивают идентифицированное значение выбега со значением требуемого приращения положения исполнительного органа на следующем шаге управления. При превышении значением выбега значения требуемого приращения положения исполнительного органа выдачу управляющего сигнала не производят, в противном случае формируют очередной управляющий импульс. Длительность этого импульса выбирают равной отношению разности требуемого приращения положения исполнительного органа и идентифицированного значения выбега к индентифициро- ваному значению постоянной времени исполнительного органа. 1 ил. ел С
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
