pa которого соединен с неинвертирующим входом четвертого дифференциального усилителя первого блока моделирования дискретных изгибных жесткостей, инвертирующий вход второго дифференциального усилителя которого подключен к неинвертирующему входу второго дифференциального усилителя второго блока моделирования дискретных изгибных жесткостей, выход четвертого дифференциального усилителя первого блока моделирования изгибных жесткостей соединен с инвертирующим входом второго дифференциального усилителя второго блока моделирования
дискретных масс, а первый вывод блока задания граничных условий подключен к неинвертирующему входу первого дифференциального усилителя -го I блока моделирования дискретных изгибных жесткостей, выход которого соединен с вторым выводом блока задания граничных условий, третий вывод коTopoi o подключен к неинвертирующему входу третьего дифференциального усилителя п -го блока моделирования дискретных изгибный жесткостей, выход которого соединен с четвертым выводом блока задания граничных условий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования изгибных колебаний стержней | 1985 |
|
SU1675912A2 |
| Устройство для моделирования граничных условий | 1988 |
|
SU1547004A1 |
| Устройство для решения нелинейных задач теории поля | 1983 |
|
SU1103254A1 |
| Устройство для задания граничных условий | 1983 |
|
SU1137489A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Устройство для решения задач теории поля | 1985 |
|
SU1290368A1 |
| Устройство для решения дифференциальных уравнений | 1980 |
|
SU1339594A1 |
| Управляемый неинвертирующий интегратор | 1981 |
|
SU972522A1 |
| Устройство для решения дифференциальных уравнений в частных производных | 1982 |
|
SU1103253A1 |
| Интегрирующее устройство | 1979 |
|
SU813454A1 |
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ИЗГИБНЫХ КОЛЕБАНИЙ СТЕРЖНЕЙ, содержащее п, последовательно соединенных узлов моделирования стержня, каждый из которых состоит из блока моделирования дискретной массы и блока моделирования дискретной изгибной жесткости, блок задания начальных условий и блок задания граничных условий, о тлич ающеес я тем, что, с целью повышения точности, каждый блок моделирования дискретных масс содержит два дифференциальных усилителя, два интегратора,три масштабных резистора и .переменный резистор, причем инвертирующий вход первого интегратора через первый масштабный резистор соединен с выходом второго интегратора, инвертирующий вход которого через второй масштабный резистор подключен к выходу первого дифференциального усилителя и к первому выходу переменного резистора, второй вывод которого непосредственно соединен с инвертирующим входом первого дифференциального усилителя и через третий масштабный резистор подключен к выходу второго дифференциального усилителя, неинвертирующиё входы первого дифференциального усилителя и интеграторов соединены с шиной нулевого потенциала, а каждый блок моделирования дискретных изгибных жесткостей содержит четыре дифференциальных усилителя, масштабный резистор и переменный резистор, при,чем выход первого дифференциального усилителя.подключен к инвертирующему входу второго дифференциального усилителя, выход которого через масштабный резистор соединен с инвертирующим входом третьего дифференциального усилителя с первым выводом и подвижным контактом :переменного резистора, второй вывод которого подключен к инвертирующему входу четвертого дифференциального усилителя и к выходу третьего дифференциального усилителя, неинвертирующий вход которого соединен с шиной нулевого потенциала, первый вывод блока задания начальных условий соединен с вы(Л ходом первого интегратора первого блока моделирования дискретных масс и с инвертирующим входом первого дифференциального усилителя первого блока моделирования дискретных изгибных жесткостей, неинвертирующий вход второго дифференциального усилителя которого подключен к второму выводу блока задания начальных условий, третий вывод которого соединен с подвижным контактом переменного резистора СП первого блока моделирования дискретсо ных масс и с инвертирующим входом четвертого ди фференциального усилителя первого блока моделирования дискретных изгибных жесткостей, вы,ход которого подключен к неинвертирующему входу второго дифференциального усилителя первого бЛока моделирования дискретных масс, инвертирующий вход которого соединен с четвертым выводом блока задания начальных условий, неинвертирующий вход первого дифференциального усилителя первого блока моделирования дискретных.изгибных жесткостей подключен к выходу первого интегратора второго блока моделирования дискретных масс, подвижный контакт переменного резистр
1
Изобретение относится к аналоговой вычислительной технике и может быть использовано при колебании механических устройств, расчетная схема которых может быть сведена к стержневым системам.
Известно устройство для моделиррвани:я колебаний стержневых систем содержа цее операционные усилители и масштабные резисторы
Наиболее близким к изобретению является устройство для моделироваIния изгибных колебаний стрежней, содержащее п последовательно соединенных узлов моделирования стержня, каждый из которых состоит из блока моделирования дискретной массы и блока моделирования дискретной изгибной жесткости, блок задания начальных условий и блок задания граничных условий 2.Недостатком известных устройств является сложная реализация отдельных блоков-аналогов изгибной жесткости и мас7Ы, содержащих пять операционных усилителей в каждом элементе-аналоге жесткости и четыре в каждом элементе-аналоге массы. Такая реализация приводит к тому, что устройство содержит большое количество операционных усилителей, включенных последовательно, что приводит к снижению точности моделирования.
Целью изобретения является упрощение устройства и повышение точности моделирования.
Поставленная цель -достигается тем, что в устройстве, содержащем п последовательно соединенных узлов моделирования стержня, каждый из которых состоит из блока моделирования дискретной массы и блока моделирования дискретной изгибной жесткости, блок задания начальных условий и блок задания граничных условий, каждый блок моделирования дискретных масс содержит два дифференциальных усилителя, два интегратора, три масштабных резистора и переменный ре5 зистор, причем инвертирующий вход первого интегратора через первый масштабный резистор соединен с выходом второго интегратора, инвертирующий вход которого через второй мас0 штабный резисуор подключен к выходу первого дифференциального усилителя 9И к первому выводу переменного резистора, второй вывод которого непосредственно соединен с инвертируюс щим входом первого дифференциального усилителя и через третий масштабный резистор подключен к выходу второго дифференциального усилителя, неинвертирующие входы первого дифференциального усилителя и интеграто0 ров соединены с шиной нулевого потенциала, а каждый блок моделирования дискретных изгибных жесткостей содержит четыре дифференциальных усилителя, масштабный резистор и переменный
Ь резистор, причем выход первого дифференциального усилителя подключен к инвертирующему входу второго дифференциального усилителя, выход которого через масштабный резистор сое0 динен с инвертирующим входом треть его .дифференциального усилителя, с первым выводом и подвижным контактом переменного резистора, второй вывод : которого подключен к инвертирующему
5 входу четвертого дифференциального усилителя и к выходу третьего диф:ЛеренЦиального усилителя, неинвертирующий вход которого соединен с шиной
нулевого потенциала, первый вывод 0 блока задания начальных условий
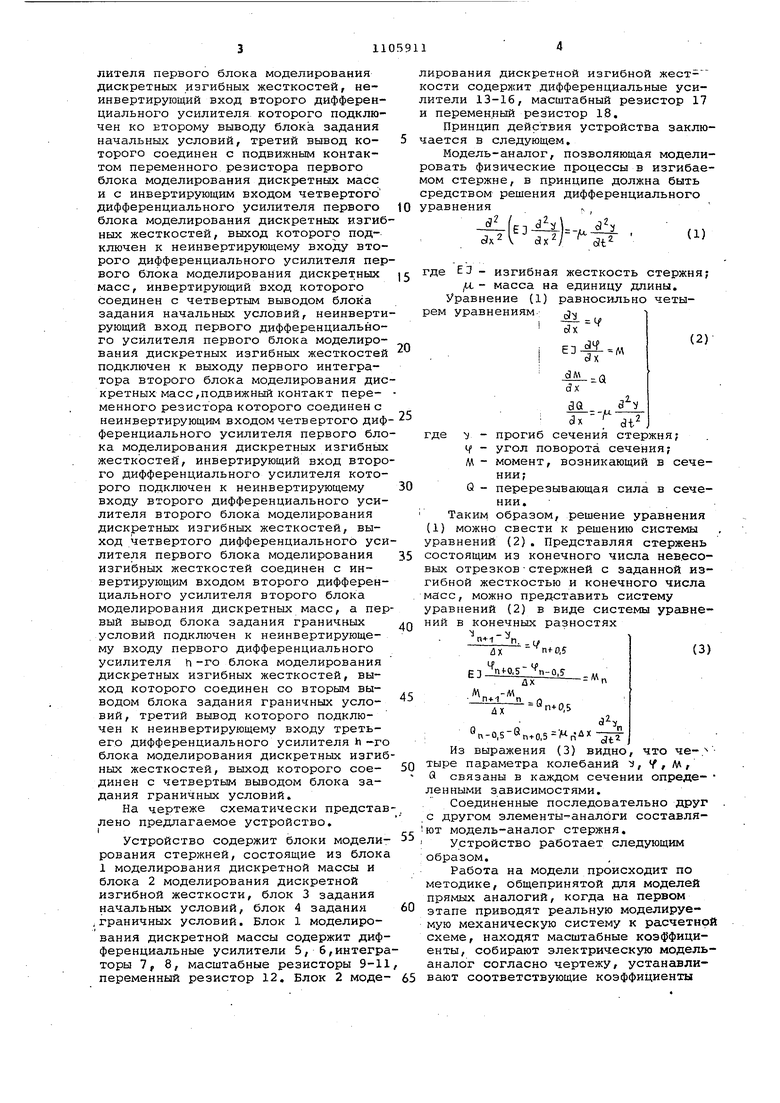
соединен с выходом первого интеграi тора первого блока моделирования дискретных масс и с инвертирующим входом первого дифференциального усилителя первого блока моделирования дискретных иэгибных жесткостей, неинвертиругащий вход второго дифференциального усилителя которого подключен ко второму выводу блока задания начальных условий, третий вывод которого соединен с подвижным контактом переменного резистора первого блока моделирования дискретных масс и с инвертирующим входом четвертого дифференциального усилителя первого блока моделирования дискретных изгиб ных жесткостей, выход которого подключен к неинвертирующему входу второго дифференциального усилителя пер вого блока моделирования дискретных масс, инвертирующий вход которого соединен с четвертым выводом блока задания начальных условий, неинверти рующий вход первого дифференциального усилителя первого блока моделирования дискретных изгибных жесткостей подключен к выходу первого интегратора второго блока моделирования дис кретных масс,подвижный контакт переменного резистора которого соединен с неинвертирующим входом четвертого диф ференциального усилителя первого бло ка моделирования дискретных изгибных жесткостей, инвертирующий вход второ го дифференциального усилителя которого подключен к неинвертирующему входу второго дифференциального усилителя второго блока моделирования дискретных изгибных жесткостей, выход четвертого дифференциального ус лителя первого блока моделирования изгибных жесткостей соединен с инвертирующим входом второго дифферен циального усилителя второго блока моделирования дискретных масс, а пе вый вывод блока задания граничных условий подключен к неинвертирующему входу первого дифференциального усилителя п-го блока моделирования дискретных изгибных жесткостей, выход которого соединен со вторым выводом блока задания граничных условий, третий вывод которого подключен к неинвертирующему входу третьего дифференциального усилителя h -г блока моделирования дискретных изги ных жесткостей, выход которого соединен с четвертым выводом блока задания граничных условий. На чертеже схематически предста лено предлагаемое устройство. Устройство содержит блоки модели рования стержней, состоящие из блок 1 моделирования дискретной массы и блока 2 моделирования дискретной изгибной жесткости, блок 3 задания начальных условий, блок 4 задания ;граничных условий. Блок 1 моделирования дискретной массы содержит диф ференциальные усилители 5, 6,интегр торы 7, 8, масштабные резисторы 9-1 переменный резистор 12. Блок 2 моде ирования дискретной изгибной жест- ости содержит дифференциальные усиители 13-16, масштабный резистор 17 переменный резистор 18. Принцип действия устройства заклюается в следующем. Модель-аналог, позволяющая моделиовать физические процессы в изгибаеом стержне, в принципе должна быть редством решения дифференциального равнения 6/ L- 2 jZ, -1(5t де ЕЛ - изгибная жесткость стержня; f-{. - масса на единицу длины. Уравнение (1) равносильно четыем уравнениям tЕ:А.„ : dt - прогиб сечения стержня Ч - угол поворота сечения; М - момент, возникающий в сечении;Q - перерезывающая сила в сечении. Таким образом, решение уравнения (1) можно свести к решению системы уравнений (2). Представляя стержень состоящим из конечного числа невесовых отрезковстержней с заданной изгибной жесткостью и конечного числа асс, можно представить систему уравнений (2) в виде системы уравнений в конечных разностях ll}±l V-U Лх ni-o.s Ч - V g ,5 п-ОЛ .,- .S дх , ; ,, выражения (3) видно, что че-. , V, М, тыре параметра колебаний з, Я связаны в каждом сечении опреде- ленными зависимостями. Соединенные последовательно друг с другом элементы-аналоги составляют модель-аналог стержня. Устройство работает следующим образом. Работа на модели происходит по методике, общепринятой для моделей прямых аналогий, когда на первом этапе приводят реальную моделируемую механическую систему к расчетной схеме, находят масштабные коэффициенты, собирают электрическую модельаналог согласно чертежу, устанавливают соответствующие коэффициенты
В элементах аналогах, выполняют граничные и начальные условия, включают в модель необходимую аппаратуру, моделирующую внешние факторы, а также анализирующую аппаратуру. С помощью анализирующей аппаратуры ;замеряют напряжения на интересующих I полюсах модели для интересующих режимов работы, а затем с помощью масштабных коэффициентов переводят напряжения в соответствующие величины механических параметров колебаний. Например, моделируются изгибные ко лебания свободного стержня в ре±име вынужденных колебаний от источника перемещений синусоидальной фермы. Тогда генератор синусоидальных колебаний, включенный в шину перемещений между полюсом П 1 блока 1 и общей шиной источников питания (землей), является источником синусоидальных колебаний во всех остальных шинах устройства, причем в зависимости от частоты генератора перераспределение напряжений вдоль устройства от блока к блоку будет различно, что и доказывает возникновение форм колебаний , присущих данному соотношению упруго-массовых характеристик расчетной схемы стержня (коэффициентов усиления в блоках 1 и 2 устройства). Подобным же образом устройство работает при моделировании более сложных задач динамики изгибаемого стержня.
При решении одинаковых задач с одинаковой точностью (она в основном зависит, как указывалось, от ошибки дискретизации,и следовательно, от числа блоков в устройстве), предлагаемое устройство в отличие от прототипа, который является также и базовым объектом, позволяет экономить
минимум 10 операционных усилителей на одном моделируемом стержне (в случае 10 массовой дискретизации). Для сложных моделей-аналогов эта экономия возрастает. Учитывая, что современный усилитель стоит 8-10 руб., то экономия при создании устройства получается около 80-100 руб. При созданий устройства для моделирования реальных механических систем, расчетная схема которых сводится к 510 стержням, эта экономия составит по сравнению с базовым объектом 4001000 руб.При создании подобных устройств на их стоимость сильно влияет технологичность элементов-аналогов , так как количество их в устройстве значительно.
Предлагаемое устройство более технологично. Кроме того, появляется возможность выполнения предлагаемых элементов-аналогов по интегральной технологии в виде единой микросхемы (а не набирать из отдельных усилителей, пусть даже объединенных в одном корпусе как серия Т 084). В этом случае представляется целесообразным изготовление серии элементов-аналогов , содержащей весь минимально необходимый набор элементов-аналогов для моделирования методом прямых аналогий, выполненных с учетом удобства соединения элементов серии друг с дргом, удобства замера напряжений на их полюса:4 и т.д. При этом такие серии элементов могут быть созданы для решения задач механики, акустики, гидравлики и т.д., в соответствии с известными электромеханической, электроакустической и другими системами аналогий. Эффективность таких моделирующих устройств при этом значительно возрастает.
(fn-Л
.s)
/75
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и др | |||
| Модели прямой аналогии | |||
| М., Наука, 1979, с | |||
| Устройство для отыскания металлических предметов | 1920 |
|
SU165A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
