(Л
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1984 |
|
SU1259428A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод | 1985 |
|
SU1332427A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| Устройство для регулирования натяжения полосы в башенной печи | 1983 |
|
SU1104176A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |

Использование: в электротехнике, в частности в системах бесконтактного удержа- ния быстровращающихся роторов в магнитных подшипниках. Сущность изобретения: устройство содержит два магнитных подшипника, каждый из которых содержит по две пары электромагнитов в ортогональных осях каждого вала ротора, датчики положения в ортогональных осях валов ротора, датчик угловой скорости ротора, а также датчики тока питания электромагнитов, управляемые источники питания электромагнитов, задатчики положения, энергетических режимов и номинального зазора, измерители скоростей и усилий, регуляторы положения, скоростей усилий и формирователь режимов. 6 з.п ф-лы, 5 ил.
Изобретение относится к электротехнике, в частности к системам бесконтактного удержания быстровращающихся роторов в магнитных подшипниках и может быть использовано в энергетике, машиностроении, станкостроении, химической промышленности и т.д.
Известно устройство, содержащее два магнитных подшипника, каждый из которых содержит по две пары электромагнитов в ортогональных осях, управляемые источники питания электромагнитов, датчики положения ротора по каждой оси обоих подшипников, измерители скоростей по ортогональным осям каждого подшипника, регуляторы положения.
Недостатками известного устройства управления магнитными подшипниками являются отсутствие возможности управлять
энергетическими режимами, необходимость перенастройки системы при изменении характеристик объекта управления, ограниченный диапазон изменения координат движения ротора, так как при этом система выходит из линейной зоны.
Наиболее близким к предлагаемому устройству по технической сущности и достигаемому результату является устройство, содержащее два магнитных подшипника каждый из которых содержит по две пары электромагнитов в ортогональных осях, управляемые источники питания электромагнитов, датчики положения ротора по каждой оси обоих подшипников, измерители скоростей, регуляторы положения, устройство компенсации гироскопического эффекта.
Недостатками указанного устройства являются ограниченный диапазон измене 1
СО
ю
ь
о о
ния координат движения ротора, отсутствие возможности управления энергетическими режимами, а также необходимость перенастройки системы при изменении характеристик объекта управления.
Цель изобретения - улучшение динамических свойств системы управления пространственным положением вращающегося ротора посредством магнитных подшипников, т.е. разработка системы, обладающей типовыми динамическими свойствами, обеспечивающей более высокое быстродействие, эффективное подавление колебательных возмущений, а также поддерживающей оптимальные энергетические режимы во всем диапазоне немагнитных зазоров.
Поставленная цель достигается тем, что в системе управления дополнительно введены последовательно соединенные регулятор скоростей, формирователь режимов и регулятор усилий, а также задатчики энергетических режимов и номинального зазора, измеритель усилий, выходами связанный с входами обратных связей регулятора усилий, а токовыми входами - с выходами датчиков тока электромагнитов, при этом координатные входы регулятора и измерителя усилий подключены к выходам датчиков положения ротора, входы обратных связей регулятора скоростей - к выходам измерителя скоростей , а вход угловой скорости регулятора скоростей и входы задания режимов формирователя режимов соответственно - к выходу датчика угловой скорости ротора и к выходам задатчика энергетических режимов, кроме того, входы задания номинального зазора регулятора и измерителя усилий соединены с задатчиком номинального зазора.
Регулятор усилий содержит блок компенсации электромагнитных свойств объекта и блок формирования типовых динамических свойств контура усилий, причем первые входы блока компенсации электромагнитных свойств объекта подключены к первым выходам блока формирования типовых динамических свойств контура усилий, а вторые входы блока компенсации электромагнитных свойств объекта подключены к вторым выходам блока формирования типовых динамических свойств контура усилий, координатные входы блока компенсации электромагнитных свойств объекта связаны с выходами датчиков положения, выходы блока компенсации электромагнитных свойств объекта являются выходами регулятора усилий, входы блока формирования типовых динамических характеристик контура усилий являются входами регулятора усилий.
Регулятор скоростей состоит из блока компенсации механических свойств объекта
и блока формирования типовых динамических свойств контура скоростей, причем первые входы блока компенсации механических свойств объекта подключены к первым выходам блока формирования типовых
0 динамических свойств контура скоростей, а вторые входы блока компенсации механических свойств подключены к вторым выходам блока формирования типовых динамических свойств контура скоростей, вход угло5 вой скорости ротора блока компенсации механических свойств объекта связан с выходом датчика угловой частоты вращения ротора, входы формирователя типовых динамических свойств контура скоростей яв0 ляются входами регулятора скоростей, выходы блока компенсации механических свойств объекта являются выходами регулятора скоростей.
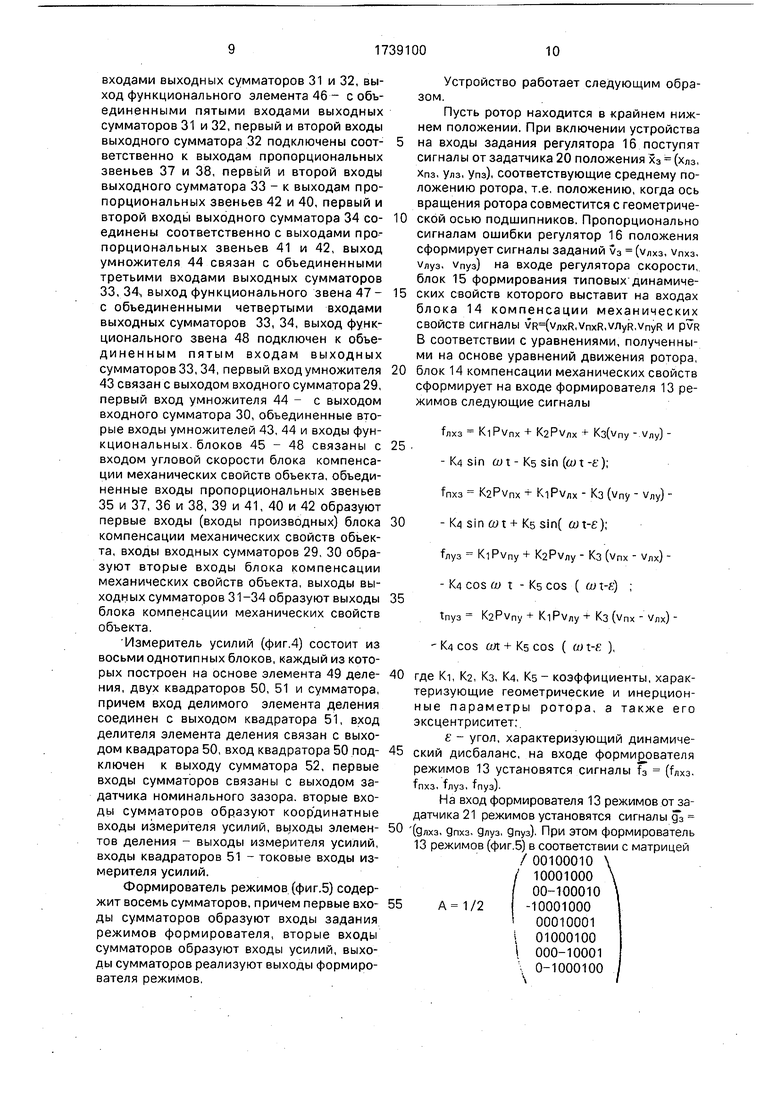
Формирователь режимов содержит во5 семь сумматоров, причем первые входы сумматоров образуют входы задания режимов формирователя режимов, вторые входы сумматоров - входы усилий формирователя режимов, выходы сумматоров - выходы
0 формирователя режимов. Измеритель усилий состоит из восьми однотипных блоков, каждый из которых содержит элемент деления, два квадратора и сумматор, причем вход делимого элемента деления соединен
5 с выходом первого квадратора, вход делителя элемента деления связан с выходом второго квадратора, вход второго квадратора подключен к выходу сумматора, первые входы сумматоров связаны с выходами задат0 чиков номинального зазора, вторые входы сумматоров образуют координатные входы измерителя усилий, выходы элементов деления образуют выходы измерителя усилий, входы первого элемента возведения в квад5 рат образуют токовые входы измерителя усилий.
Блок компенсации электромагнитных свойств объекта состоит из восьми подблоков, каждый из которых содержит устройст0 во извлечения квадратного корня, устройство деления, умножитель, сумматор координат и выходной сумматор, причем один вход выходного сумматора подключен к выходу устройства деления, другой вход
5 выходного сумматора - к выходу умножителя, выход устройств э извлечения квадратного корня - к входу делителя устройства деления и к первому входу умножителя, второй вход умножителя - к выходу сумматора координат, входы делимого устройств деления образуют первые входы блока компенсации электромагнитных свойств объекта, входы устройств извлечения квадратного корня - вторые входы блока компенсации электромагнитных свойств объекта, выходы выходных сумматоров - выходы блока компенсации электромагнитных свойств объекта, первые входы сумматоров координат связаны с выходами задатчиков номинального зазора, вторые входы сумматоров координат образуют координатные входы блока компенсации электромагнитных свойств объекта.
Блок компенсации механических свойств объекта состоит из двух входных сумматоров, четырех выходных сумматоров, восьми пропорциональных звеньев, двух умножителей и четырех функциональных (нелинейных) элементов, причем первый и второй входы первого выходного сумматора соединены с выходами соответственно первого и второго пропорциональных звеньев, выход первого умножителя - с объединенными третьими входами первого и второго выходных сумматоров, выход первого функционального элемента - с объединенными четвертыми входами первого и второго выходных сумматоров, выход второго функционального элемента - с объеди- ненными пятыми входами первого и второго выходных сумматоров, первый и второй входы второго выходного сумматора - к выходам соответственно четвертого и третьего пропорционального звена, первый и второй входы третьего выходного сумматора - к выходам пятого и шестого пропорциональных звеньев, первый и второй входы четвертого выходного сумматора - с выходами седьмого и восьмого пропорциональных звеньев, выход второго умножителя связан с объединенными третьими входами третьего и четвертого выходных сумматоров, выход третьего функционального звена - с объединенными четвертыми входами третьего и четвертого выходных сумматоров, выход четвертого функционального звена подключен к объединенным пятым входам третьего и четвертого выходных сумматоров, первый вход первого умножителя связан с выходом первого входного сумматора, первый вход второго умножителя - с выходом второго входного сумматора, объединенные вторые входы умножителей и входы функциональных блоков - с входом угловой скорости ротора блока компенсации механических свойств объекта, объединенные входы первого и третьего пропорциональных звеньев, объединенные входы второго и четвертого пропорциональных звеньев, объединенные входы пятого и
седьмого пропорциональных звеньев, объединенные входы шестого и восьмого пропорциональных звеньев образуют первые входы блока компенсации механических
свойств объекта, выходы выходных сумматоров образуют выходы блока компенсации механических свойств объекта, входы первого и второго входных сумматоров, вторые входы блока компенсации механических
0 свойств объекта.
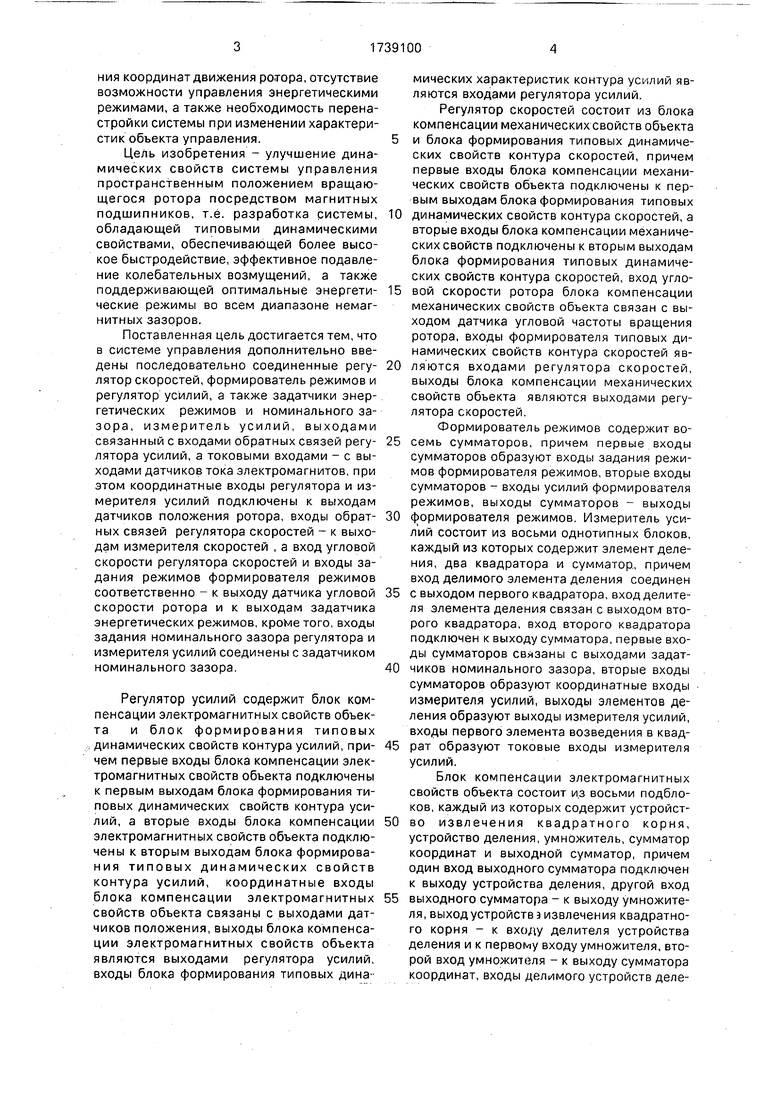
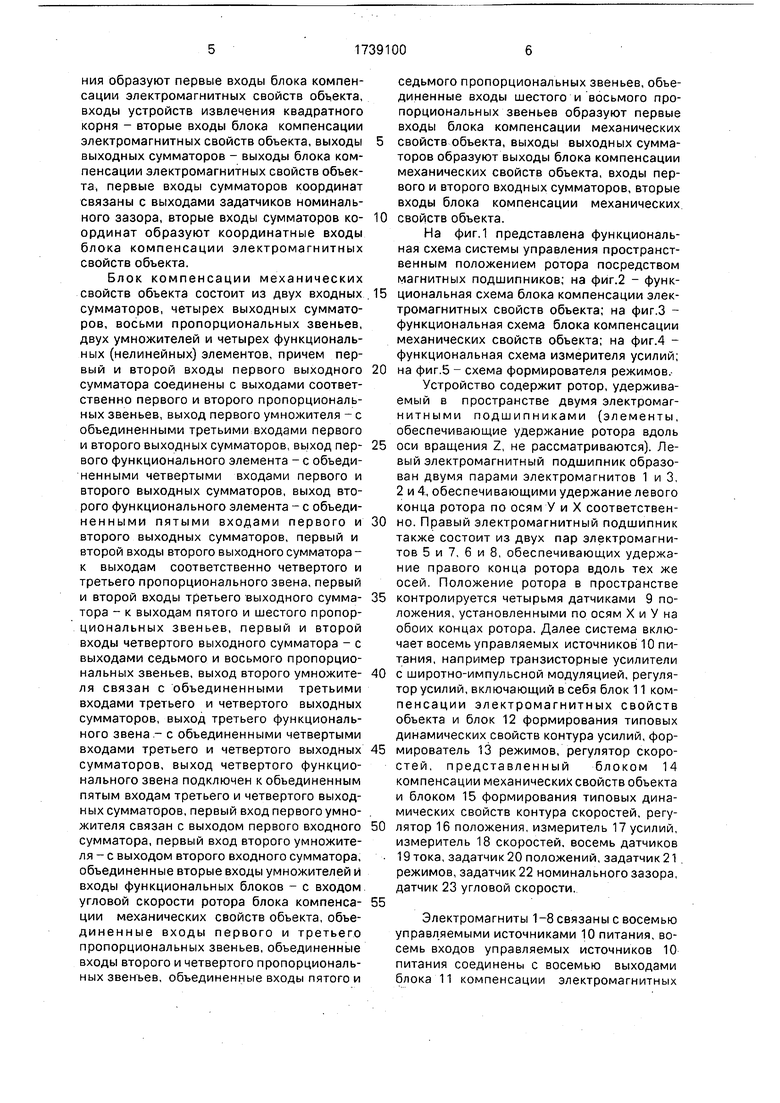
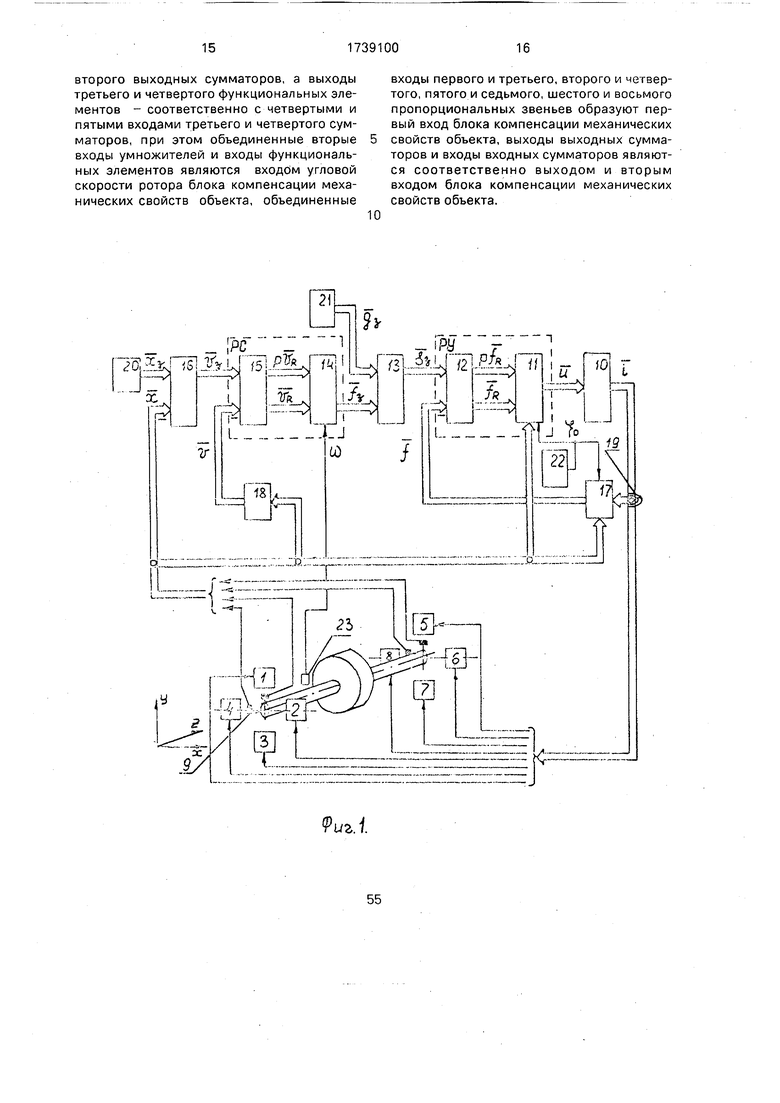
На фиг.1 представлена функциональная схема системы управления пространственным положением ротора посредством магнитных подшипников; на фиг.2 - функ5 циональная схема блока компенсации электромагнитных свойств объекта; на фиг.З - функциональная схема блока компенсации механических свойств объекта; на фиг.4 - функциональная схема измерителя усилий;
0 на фиг.5 - схема формирователя режимов.
Устройство содержит ротор, удерживаемый в пространстве двумя электромагнитными подшипниками (элементы, обеспечивающие удержание ротора вдоль
5 оси вращения Z, не рассматриваются). Левый электромагнитный подшипник образован двумя парами электромагнитов 1 и 3, 2 и 4, обеспечивающими удержание левого конца ротора по осям У и X соответствен0 но. Правый электромагнитный подшипник также состоит из двух пар электромагнитов 5 и 7, 6 и 8, обеспечивающих удержание правого конца ротора вдоль тех же осей. Положение ротора в пространстве
5 контролируется четырьмя датчиками 9 положения, установленными по осям X и У на обоих концах ротора. Далее система включает восемь управляемых источников 10 питания, например транзисторные усилители
0 с широтно-импульсной модуляцией, регулятор усилий, включающий в себя блок 11 компенсации электромагнитных свойств объекта и блок 12 формирования типовых динамических свойств контура усилий, фор5 мирователь 13 режимов, регулятор скоростей, представленный блоком 14 компенсации механических свойств объекта и блоком 15 формирования типовых динамических свойств контура скоростей, регу0 лятор 16 положения, измеритель 17 усилий,
измеритель 18 скоростей, восемь датчиков
19 тока, задатчик20 положений, задатчик21
режимов, задатчик 22 номинального зазора,
датчик 23 угловой скорости.
5
Электромагниты 1-8 связаны с восемью управляемыми источниками 10 питания, восемь входов управляемых источников 10 питания соединены с восемью выходами блока 11 компенсации электромагнитных
свойств объекта регулятора усилий, первые восемь входов блока 11 компенсации регулятора усилий - с восемью выходами производных блока 12 формирования типовых динамических свойств контура усилий, дру- гие восемь входов блока 11 компенсации электромагнитных свойств объекта - с восемью оставшимися выходами блока 12 формирования типовых динамических свойств контура усилий, восемь выходов измерителя 17 усилий - с восемью входами блока 12 формирования типовых динамических свойств контура усилий, реализующих входы обратных связей регулятора усилий, восемь входов задания регулятора усилий связаны с восемью выходами формирователя 13 режимов, четыре входа задания формирователя 13 режимов - с выходами задатчика 21 энергетических режимов, другие четыре входа формирователя 13 режимов-с четырьмя выходами блока 14 компенсации механических свойств объекта регулятора скоростей, первые четыре входа блока 14 компенсации механических свойств объекта подключены к выходам производных блока 15 формирования типовых динамических свойств контура скоростей, другие четыре входа блока 14 компенсации механических свойств объекта связаны с оставшимися четырьмя выхо- дами блока 15 формирования типовых динамических свойств контура скоростей, четыре входа блока 15, образующих входы обратных связей регулятора скоростей, соединены с четырьмя выходами измерителя 18 скоростей, четыре входа блока 15, образующих входы задания регулятора скоростей, подключены к четырем выходам регулятора 16 положения, четыре входа заданий регулятора 16 положений связаны с выходами задатчика 20 положений, выходы датчиков 9 положений подключены к четырем входам обратных связей регулятора 16 положений, объединенных с входами измерителя 18 скоростей и координатными вхо- дами измерителя 17 усилий и блока 11 компенсации электромагнитных свойств объекта. Кроме того, восемь входов измерителя 17 усилий соединены с выходами восьми датчиков 19 тока, на вход угловой скорости вращения ротора блока 14 компенсации механических свойств объекта подается сигнал ш от датчика 23 угловой скорости, а на входы номинальных зазоров блока 11 компенсации электромагнитных свойств объекта и измерителя 17 скорости поступает сигнал установки номинального зазора Ј0 от задатчика 22 номинального зазора.
Таким образом, в устройстве управления образовано три контура: контур усилий, контур скоростей, контур положений, причем регулятор положений реализован сумматором и пропорциональным звеном, измеритель скоростей имеет передаточную функцию дифференцирующего звена, блок 12 формирования типовых динамических свойств контура усилий построен на сумматоре, интеграторе и звене с передаточной функцией фильтра Боттерворса первого порядка, а блок 15 формирования типовых динамических свойств контура скоростей реализован на Ьснове трех сумматоров, звена с передаточной функцией Боттерворса второго порядка и интегратора.
Блок 11 компенсации электромагнитных свойств объекта (фиг.2) состоит из восьми однотипных подблоков, каждый из которых содержит устройство 24 извлечения квадратного корня, устройство 25 деления, умножитель 26, сумматор 27 координат и выходной сумматор 28, причем один вход выходного сумматора 28 подключен к выходу устройства 25 деления, другой вход выходного сумматора 28 подключен к выходу умножения 26, выход устройства 24 извлечения квадратного корня подключен к объединенным входам делителя устройства 25 деления и первого входа умножителя 26, второй вход умножителя 26 - к выходу сумматора 28 координат, входы делимого устройства 25 деления образуют первые входы (входы производных) блока 11 компенсации электромагнитных свойств объекта, входы устройств 24 извлечения квадратного корня образуют вторые входы блока 11 компенсации электромагнитных свойств объекта, выходы выходных сумматоров 28 образуют выходы блока 11 компенсации электромагнитных свойств объекта, первые входы сумматоров 27 координат связаны с выходом задатчика 22 номинального зазора, вторые воды сумматоров 27 координат образуют координатные входы блока 11 компенсации электромагнитных свойств объекта.
Блок компенсации механических свойств объекта (фиг.З) включает два входных сумматора 29, 30, четыре выходных сумматора 31-34, восемь пропорциональных звеньев 35-42, два умножителя 43, 44 и четыре функциональных элемента 45-48, причем первый и второй входы выходного сумматора 31 соединены соответственно с выходами пропорциональных звеньев 35, 36, выход умножителя 43 соединен с объединенными третьими входами выходных сумматоров 31 и 32, выход функционального элемента 45 - с объединенными четвертыми
входами выходных сумматоров 31 и 32, выход функционального элемента 46 - с объединенными пятыми входами выходных сумматоров 31 и 32, первый и второй входы выходного сумматора 32 подключены соответственно к выходам пропорциональных звеньев 37 и 38, первый и второй входы выходного сумматора 33 - к выходам пропорциональных звеньев 42 и 40, первый и второй входы выходного сумматора 34 соединены соответственно с выходами пропорциональных звеньев 41 и 42, выход умножителя 44 связан с объединенными третьими входами выходных сумматоров 33, 34, выход функционального звена 47 - с объединенными четвертыми входами выходных сумматоров 33, 34, выход функционального звена 48 подключен к объединенным пятым входам выходных сумматоров 33, 34, первый вход умножителя 43 связан с выходом входного сумматора 29, первый вход умножителя 44 - с выходом входного сумматора 30, объединенные вторые входы умножителей 43, 44 и входы функциональных блоков 45 - 48 связаны с входом угловой скорости блока компенсации механических свойств объекта, объединенные входы пропорциональных звеньев 35 и 37, 36 и 38, 39 и 41, 40 и 42 образуют первые входы (входы производных) блока компенсации механических свойств объекта, входы входных сумматоров 29, 30 образуют вторые входы блока компенсации механических свойств объекта, выходы выходных сумматоров 31-34 образуют выходы блока компенсации механических свойств объекта.
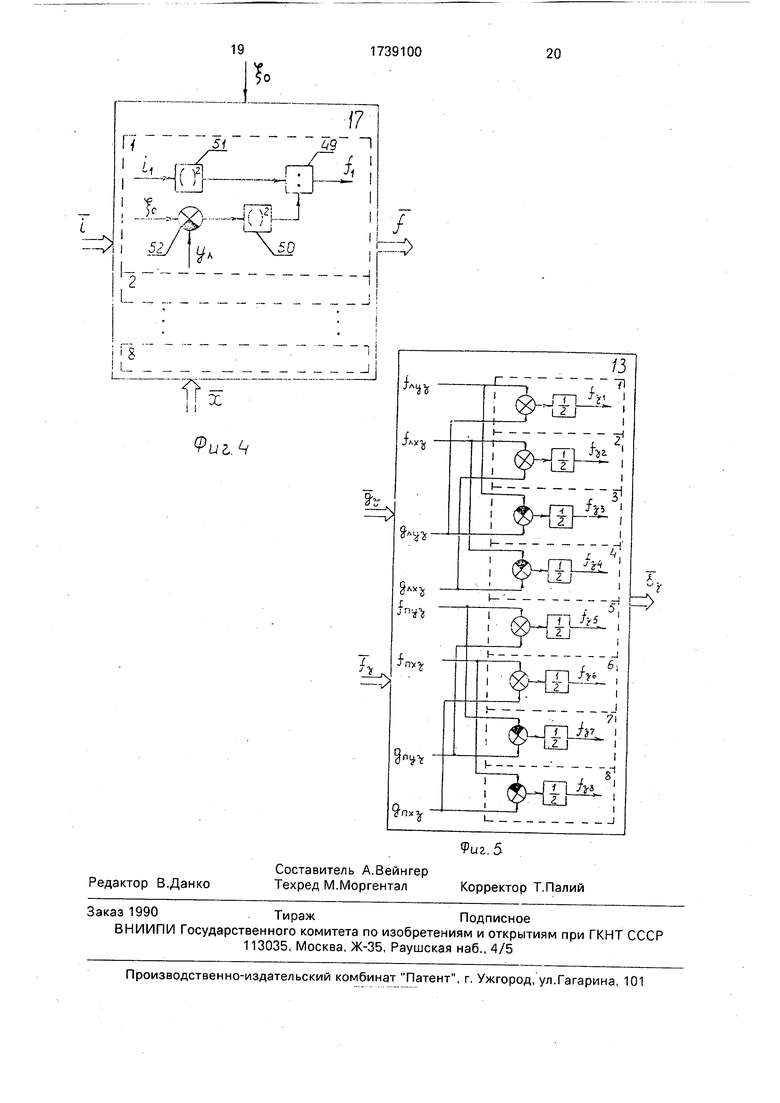
Измеритель усилий (фиг.4) состоит из восьми однотипных блоков, каждый из которых построен на основе элемента 49 деления, двух квадраторов 50, 51 и сумматора, причем вход делимого элемента деления соединен с выходом квадратора 51, вход делителя элемента деления связан с выходом квадратора 50, вход квадратора 50 подключен к выходу сумматора 52, первые входы сумматоров связаны с выходом за- датчика номинального зазора, вторые входы сумматоров образуют координатные входы измерителя усилий, выходы элементов деления - выходы измерителя усилий, входы квадраторов 51 - токовые входы измерителя усилий.
Формирователь режимов (фиг.5) содержит восемь сумматоров, причем первые входы сумматоров образуют входы задания режимов формирователя, вторые входы сумматоров образуют входы усилий, выходы сумматоров реализуют выходы формирователя режимов.
Устройство работает следующим образом.
Пусть ротор находится в крайнем нижнем положении. При включении устройства
на входы задания регулятора 16 поступят сигналы от задатчика 20 положения х3 (хлз, хпз, УЛЗ, УПЗ), соответствующие среднему положению ротора, т.е. положению, когда ось вращения ротора совместится с геометрической осью подшипников. Пропорционально сигналам ошибки регулятор 16 положения сформирует сигналы заданий v3 (v/,X3, УПХЗ. Улуз, Vnys) на входе регулятора скорости, блок 15 формирования типовых динамических свойств которого выставит на входах блока 14 компенсации механических свойств сигналы vR(vnxR,,vnyR и PVR В соответствии с уравнениями, полученными на основе уравнений движения ротора,
блок 14 компенсации механических свойств сформирует на входе формирователя 13 режимов следующие сигналы
fnxa KlPVnx + КгРУлх f Кз(УПу - УЛу) -К4 sin ш t - Ks sin (ш t -f);
fnxa K2Pvnx -f- KiPVflx - Кз (vny - УЛу) -K4 sin ш t + Ks sin( wt-Ј);
Тлуз KlPVny + KaPVny - Кз (Vnx - УЛХ) -K4 COS (I) t - Ks COS ( Ш1-Е) ;
tnys K2Pvny + KlPVfly f Кз (Vnx - Улх) - K4 cos an + Ks cos ( ш t-Ј ),
где Ki, K2, Кз, К4, Ks - коэффициенты, характеризующие геометрические и инерционные параметры ротора, а также его эксцентриситет;
е - угол, характеризующий динамический дисбаланс, на входе формирователя режимов 13 установятся сигналы fa (fnxa.
fnxa, fnya. fnya).
На вход формирователя 13 режимов от задатчика 21 режимов установятся сигналы д3 (длхз, дпхз, 9луз, дпуз). При этом формирователь 13 режимов (фиг.5) в соответствии с матрицей / 00100010 10001000 00-100010
А 1/2 | -10001000
00010001 01000100 000-10001
- 0-1000100
сформирует сигналы задания s3 (fsi, fa2, ТзЗ, ... Ьа) на входе регулятора усилий. Блок 12 формирования типовых динамических свойств контура усилий выставит на входах блока 11 компенсации электромагнитных свойств объекта сигналы TR (TRI, fR2, ...fRe), а также сигналы PfR. Далее блок 11 компенсации электромагнитных свойств объекта реализует однотипные функции (фиг.2)
(Јo-yfl) + K6-, и2(Јо-хл) + Кб,
VTR2
и3(Јо+Ул) + Кб,
т R3
и4(Јо+хл) + КбU5 VW(Јo-yn) + K6
TR5
и6(Јо-хп) + Кб,
TR6
(Јo+yn) + K6.
R7
и8(Јо+хп) + КбД:.
где Кб - коэффициент, характеризующий конструктивные параметры электромагнита,
и формирует управляющие напряжения U (Ui, U2, ..., Ue) на входах источников 10 питания, которые, в свою очередь, возбуждают катушки электромагнитов 1-8 токами i (h, 2, ..., 8) таким образом, что усилия, развиваемые электромагнитами 1- 8, начинают поднимать ротор, стремясь установить его в среднее положение.
При этом усилия будут нарастать до тех пор, пока измеритель 17 усилий, показанный на фиг.4, по сигналам с датчиков 19 токов и датчиков 9 положений в соответствии с уравнениями
«,-. 2
(Јо-УлГ (&-Хл) 2
,2
f3
з2
. f4
Ц
(|о+Ул)2 (Јо+Х„)2
,,
(Јо-уп)2 (4о-хп)
,2
f о - о
18
(|о + Хл)
,2
5
5
0
5
0
не скомпенсирует сигналы заданий s3 (fis, f23,...,f8a), сведя ошибки к нулю. Сигналы ® скорости VR на выходе блока 15 формирования типовых динамических свойств контура скоростей будут нарастать до тех пор, пока скорости движения ротора не станут соответствовать сигналам задания 73.
Движение ротора закончится, когда сигналы с датчиков 9 положений х(хл, хп, Ул, Уп) скомпенсируют сигналы х3 задатчика 20 положений, при этом сигналы задания скоростей v3 приблизятся к нулю, формиро- ватель 13 режимов установит задания , обеспечивающие удержание ротора, а контур 12, 11, 10, 17 усилий сформирует усилия, необходимые для удержания ротора в среднем положении в соответствии с заданиями.
Благодаря введению в устройство автоматического управления элементов, компенсирующих нелинейности, расширился линейный диапазон регулирования. Это позволило ввести элементы, обеспечивающие типовые динамические процессы в замкнутой системе автоматического управления, во всем диапазоне немагнитных зазоров и для различных режимов работы. Поэтому предлагаемое устройство автоматического управления обеспечивает более высокое быстродействие, усиливает демпфирование колебательных возмущений, поддерживает оптимальные энергетические режимы в системе во всем диапазоне немагнитных зазоров, т.е. улучшает динамические свойства системы.
Формула изобретения
0
5
свойств за счет повышения быстродействия, дополнительно введены последовательно соединенные регулятор скоростей, формирователь режимов и регулятор усилий, а также задатчики энергетических режимов и номинального зазора, измеритель усилий, выходами связанный с входами обратных связей регулятора усилий, а токовыми входами - с выходами датчиков тока электромагнитов, при этом координатные входы регулятора и измерителя усилий подключены к выходам датчиков положения ротора, вход обратных связей регулятора скоростей - к выходу измерителя скоростей, а вход угловой скорости регулятора скоростей и вход задания режимов формирователя режимов - соответственно к выходу датчика угловой скорости ротора и к выходу задатчика энергетических режимов, кроме того, входы задания номинального зазора регулятора и измерителя усилий соединены с задатчиком номинального зазора, а выход регулятора усилий - с управляемыми источниками питания электромагнитов.
выходы сумматоров - выход формирователя режимов.
восьми однотипных блоков, каждый из которых содержит элемент деления, два квадратора и сумматор, причем первый квадратор соединен с входом делимого, а выход сумматора через второй квадратор - с входом
0 делителя элемента деления, входы первых квадраторов и выходы элементов деления являются соответственно токовым входом и выходом измерителя усилий, а первый и второй входы сумматоров являются соответст5 венно входом задания номинального зазора и координатным входом измерителя усилий.
0 координат соединен с вторым входом умножителя, при этом входы делителей и устройства извлечения квадратного корня, а также первый и второй входы сумматора координат являются соответственно пер5 вым и вторым входами, координатным входом и входом задания номинального зазора блока компенсации электромагнитных свойств объекта, выход которого образован выходами выходных сумматоров.
5 элемента и восемь пропорциональных звеньев, причем первые и вторые входы выходных сумматоров соединены соответственно с первым и вторым, третьим и четвертым, пятым и шестым, седьмым и
0 восьмым пропорциональными звеньями, первый и второй входные сумматоры соединены соответственно с первым и вторым умножителями, выход первого умножителя подключен к третьим входам первого и вто5 рого выходных сумматоров, а выходы второго умножителя - к третьим входам третьего и четвертого выходных сумматоров, выходы первого и второго функциональных элементов связаны соответственно с четвертыми и пятыми входами первого и
второго выходных сумматоров, а выходы третьего и четвертого функциональных элементов - соответственно с четвертыми и пятыми входами третьего и четвертого сумматоров, при этом объединенные вторые входы умножителей и входы функциональных элементов являются входом угловой скорости ротора блока компенсации механических свойств объекта, объединенные
W
входы первого и третьего, второго и четвертого, пятого и седьмого, шестого и восьмого пропорциональных звеньев образуют первый вход блока компенсации механических свойств объекта, выходы выходных сумматоров и входы входных сумматоров являются соответственно выходом и вторым входом блока компенсации механических свойств объекта.
TN
Фиг 2
6)
Риг 3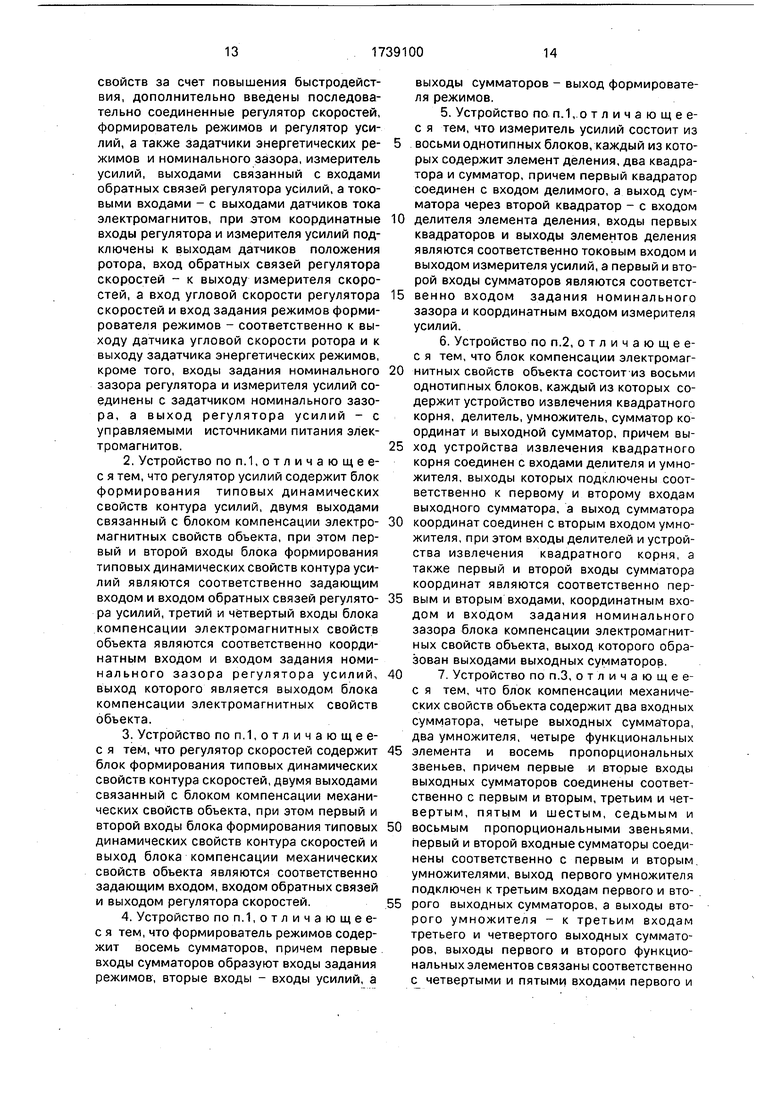
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
