(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ, ОЦЕНКИ И КОНТРОЛЯ ГИДРАВЛИЧЕСКИХ ХАРАКТЕРИСТИК И ПАРАМЕТРОВ ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2007 |
|
RU2353829C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
| Гидравлический дроссельный привод | 1990 |
|
SU1742500A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2305803C2 |
| УСТРОЙСТВО БЛОКИРОВКИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ | 1992 |
|
RU2065093C1 |
| Привод подач шлифовального станка | 1988 |
|
SU1664534A1 |
| Способ контроля дроссельных каскадов гидроусилителя | 1982 |
|
SU1097835A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1989 |
|
RU1732737C |
| ПРОПОРЦИОНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ НЕПРЯМОГО ДЕЙСТВИЯ | 2021 |
|
RU2780434C1 |


Изобретение м.б. использовано при производстве элементов следящего гидропривода. Цель изобретения - повышение точности контроля золотниковых распределителей (Р) в процессе их доводки и обеспечение автоматического контроля золотников с положительным перекрытием. К Р подводят рабочую жидкость и измеряют гидравлические параметры потока через рабочие щели в процессе смещения золотника в пределах рабочего хода. В качестве измеряемого гидравлического параметра принимают перепад давлений между управляющими полостями Р. Контроль проводят в условиях динамического состояния замкнутого контрольного контура регулирования, в к-ром Р выполняет функцию звена с преобразованием смещение -золотника - перепад давлений. Все перемещения золотника регистрируют отсечным устр-вом в виде регистрограмм. 2 с.п.фтлы, 10 ил.
Изобретение относится к области машиностроительной гидравлики и может быть использовано при производстве элементов следящего гидропривода.
Цель изобретения - повышение точности контроля золотниковых распределителей в процессе их доводки и обеспечение автоматического контроля золотников с положительным перекрытием.
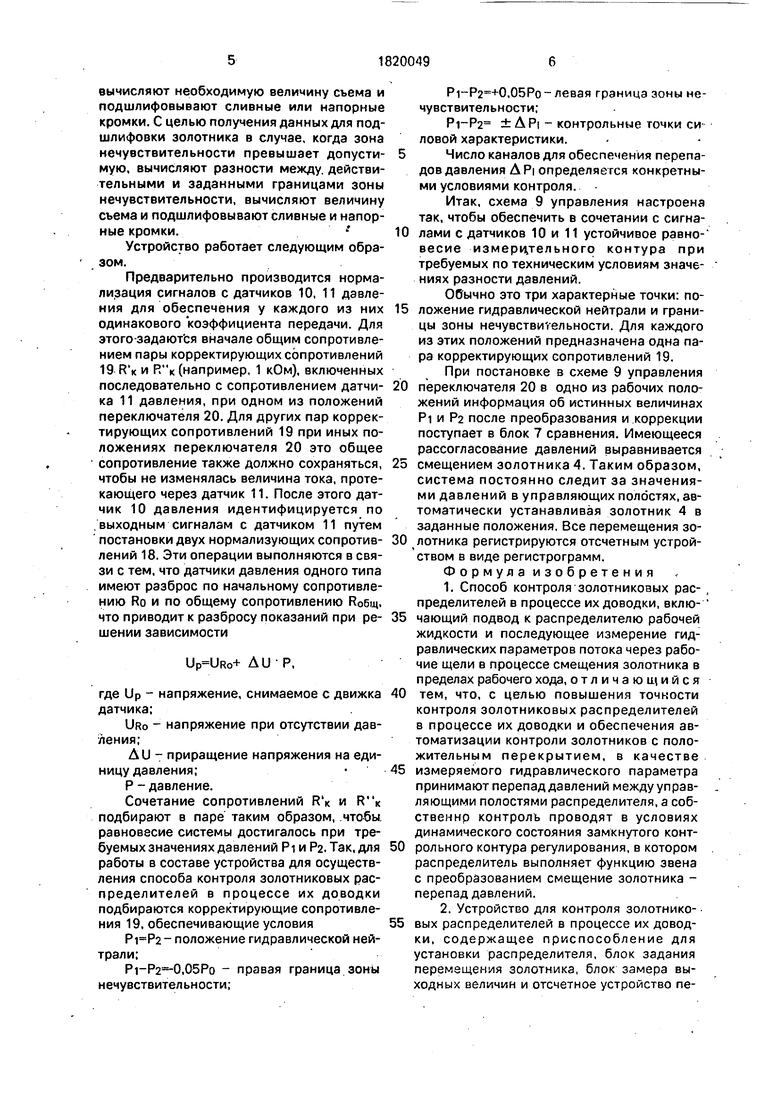
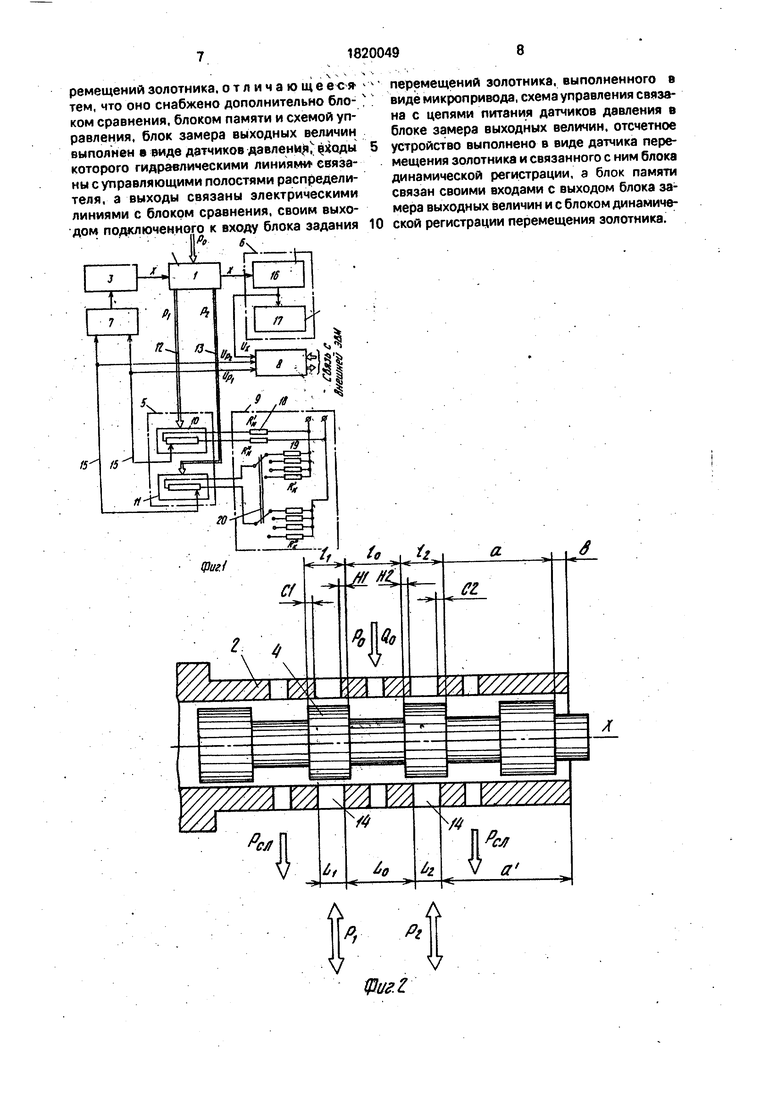
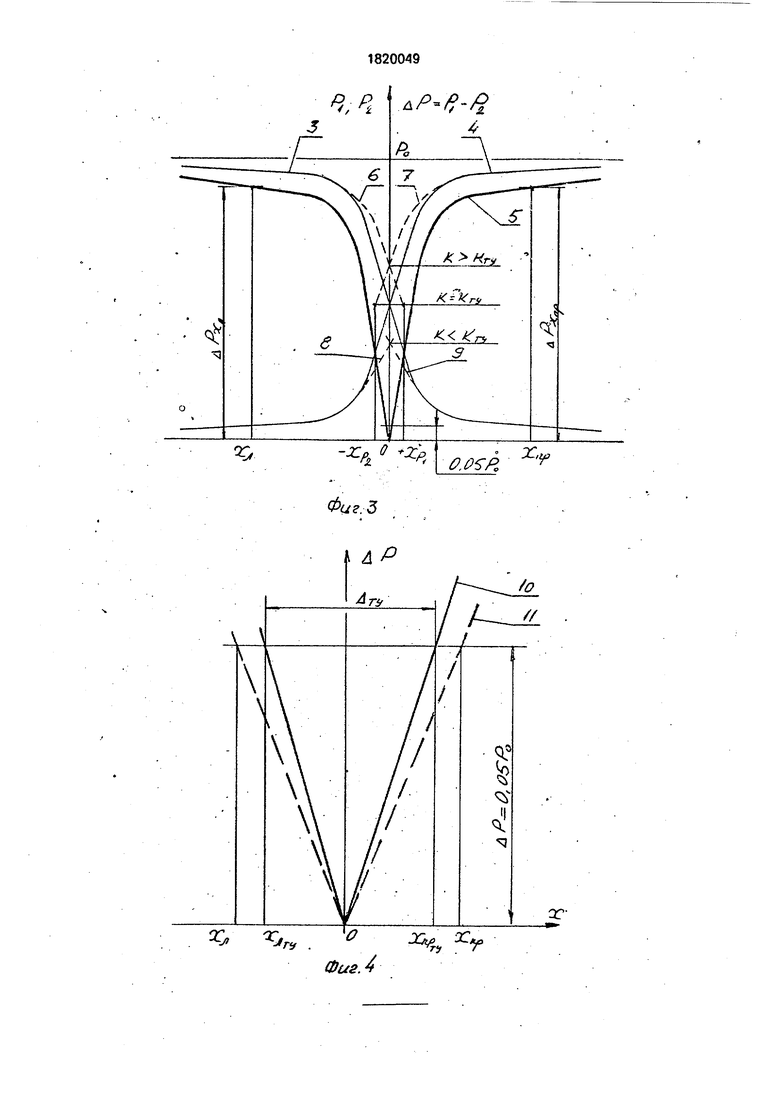
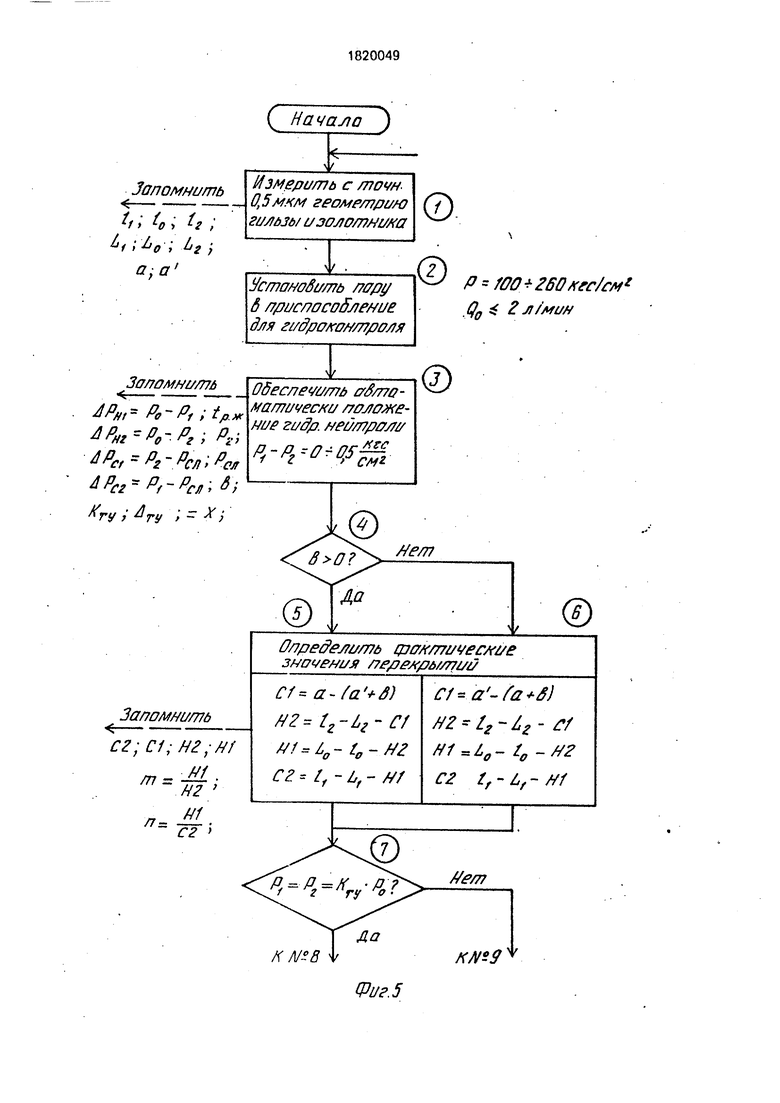
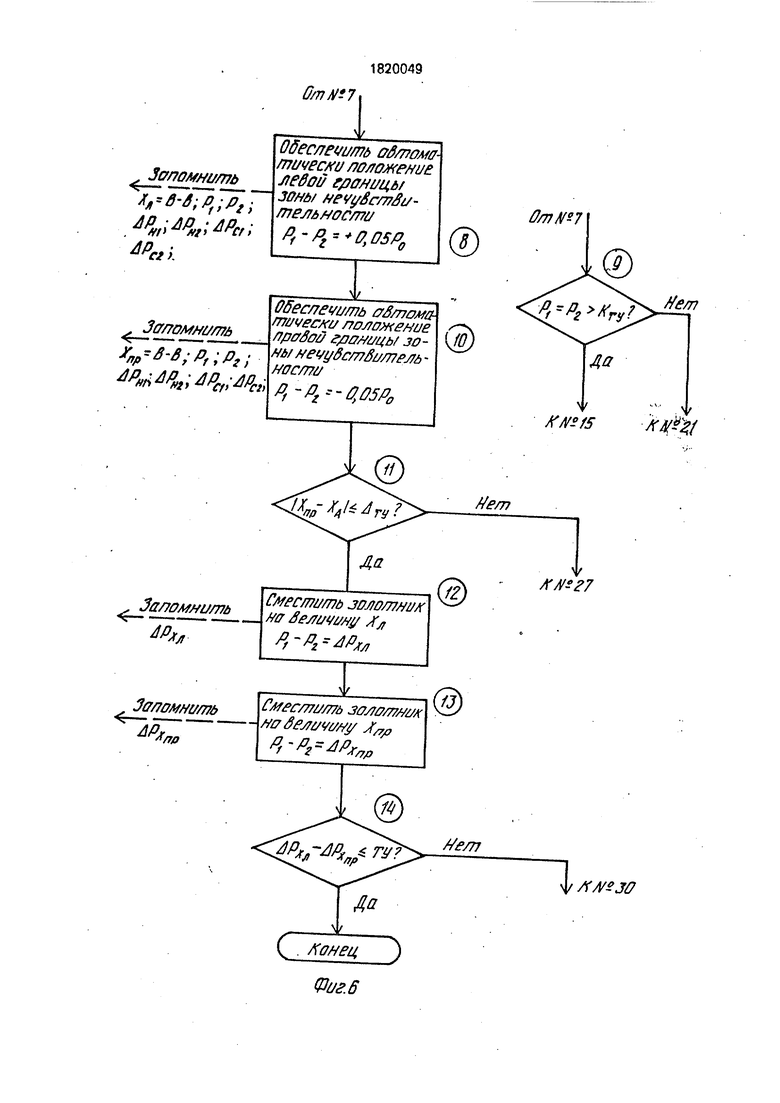
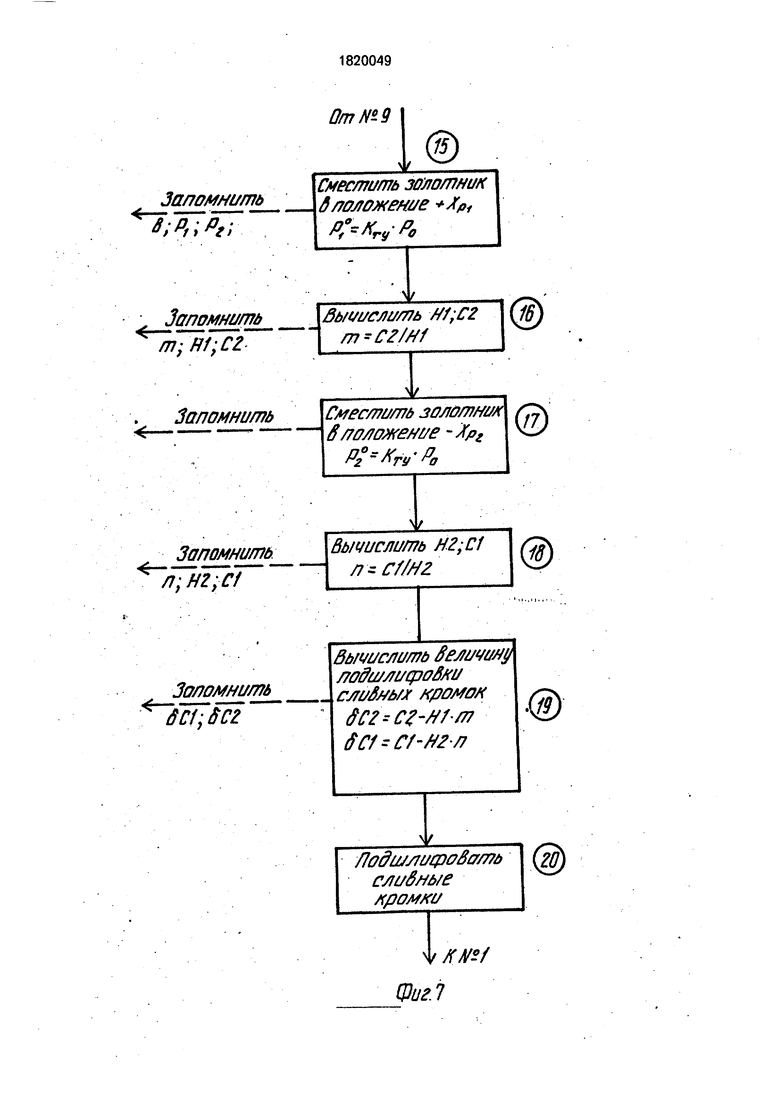
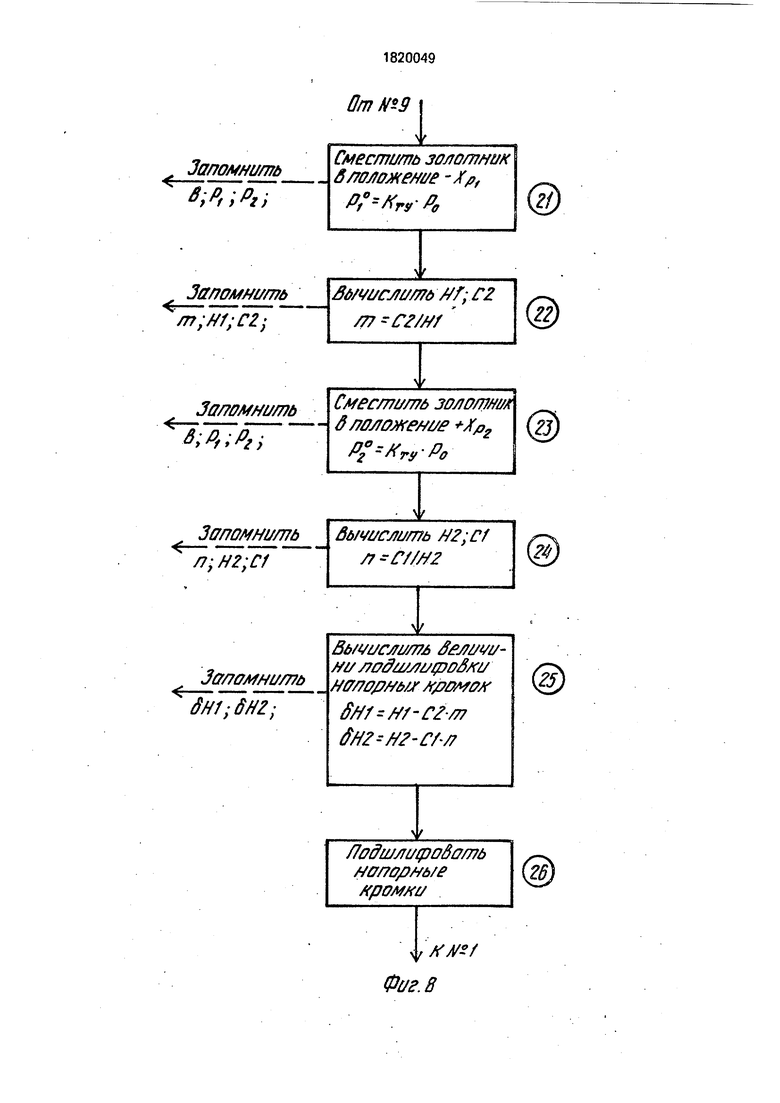
На фиг. 1 показана блок-схема устройства для контроля золотниковых распределителей; на фиг. 2 - конструктивная схема контролируемого золотникового распределителя; на фиг. 3 - силовая характеристика контролируемого распределителя; на фиг. 4 - график изменений перепада давлений в зоне нейтрали; на фиг. 5-10 - показан алгоритм контроля золотниковых распределителей.
Устройство для контроля золотниковых распределителей в процессе их доводки содержит приспособление 1 для установки распределителя 2, блок 3 задания перемещений золотников 4, блок 5 замера выходных величин, отсчетное устройство 6 перемещений золотника 4, блок 7 сравнения, блок 8 памяти и схему 9 управления. Блок 5 замера выходных величин выполнен в виде датчиков 10,11 давления, входы которого гидравлическими линиями 12, 13 связаны с управляющими полостями 14 распределителя 2, а выходы связаны электрическими линиями 15 с блоком 7 сравнения, своим выходом подключенным к входу блока 3 задания перемещений золотника 4,
00
ю о
§
ю
выполненного в виде микропривода. Схема 9 управления связана с цепями питания датчиков 10, 11 давления в блоке 5 замера выходных величин. Отсчетное устройство 6 выполнено в виде датчика 16 перемещений золотника А и связанного с ним блока 17 динамической регистрации, а блок 8 памяти связан своими входами с выходами блока 5 замера выходных величин и с блоком 17 динамической регистрации перемещений золотника 4.
Кроме того схема 9 управления содержит нормализирующие и корректирующие сопротивления 18 , 19 и переключатель 20. В основу реализации способа положены следующие условия: состояние входных кромок для всех рабочих щелей одинаково; эксцентриситет для всех зазоров одинаков; окна перекрыты как по сливным, так и по напорным кромкам; относительный коэффициент полноты окна Кп Вн /BC (гАе Вн и Вс - ширина окна соответственно у напорной и сливной кромок).
Исходя из условий соединения гидравлических сопротивлений, состояния равновесия образованного ими гидравлического мостика в положении гидравлической нейтрали, а также из вышеприведенных положений, соотношения между контрольными размерами гильзы и золотника образуют систему уравнений
HI- -С1 Н22-С22 Н12-С12 Н2+С2 ЦНо HHC1 li-Li H2+C2 l2-L2,
где Н1 и Н2 - перекрытия по напорным кромкам;
С1 и С2 - перекрытия по сливным кромкам;
lo, H, I2 - исходные геометрические размеры золотника;
Lo, Li, L2 - то же для гильзы. Из системы уравнений определяют значения всех четырех перекрытий в положении гидравлической нейтрали.
Предварительно до постановки распределителя 2 в приспособление 1 замеряются с точностью не меньше ±0,5 мкм размеры Lo, Li, 1-2, lo, li, l2, ai, a l, где ai, a i - размер, характеризующий взаимное расположение гильзы и золотника.
После установки распределителя 2 и приспособление 1 для контроля подводят рабочую жидкость, а управляющие полости 14 разъединяют между собой, имитируя остановку гидродвигателя (не показан), т.е. устанавливая Pi-P2 0-0,5 кгс/см , где Рч и Р2 давление в управляющих полостях.
0
5
0
5
0
5
0
5
0
5
При этом фиксируют все перепады давлений ДРн1, ДРн2, APci, ДРс2. А Р, где ДРн 1. А Рн2, A PCL А Рс2 - перепады давлений на соответствующих кромках распределителя; АР- общий перепад давлений, AP Pi-P2.
Параметры испытаний Pi, Р2, Ро, Qo. 1рж и размер Ь, где Ро - давление питания;
Qo - расход рабочей жидкости через распределитель;
1рж - температура рабочей жидкости;
Рсл - давление слива.
Далее по переходам 5 и 6 алгоритма рассчитывают все перекрытия С1, С2. HI, Н2 и величины m и п, а также коэффициент
., Pi - Р2
К -----, где тип- отношения вели0чин перекрытия.
Если величина коэффициента К не соответствует заданной, определяют знак отличия и в зависимости от этого проводят поиск величины необходимой подшлифовки сливных (если ) или напорных (если ) кромок, где Кту - коэффициент, определяющий величину давления в управляющих полостях в положении гидравлической нейтрали.
Для этого золотник автоматически устанавливается в положениях -ХР2 и +Хр, в которых давление в одной из управляющих полостей соответствует заданному по техническим условиям, и определяют, при каких значениях тип получается требуемый результат.
Дальнейшая реализация способа заключается в том, что путем ввода корректирующих сигналов в блок 7 сравнения автоматически устанавливают золотник 4 в положения, обеспечивающие перепады давлений, соответствующие остановке гидродвигателя - гидравлическая нейтраль и началу его равномерного устойчивого движения в обе стороны с постоянной скоростью - границы зоны нечувствительности, фиксируют в каждом случае величины давлений в управляющих полостях и положение золотника, вычисляют фактические значения перекрытий и сравнивают эти значения с заданными.
Для получения данных для подшлифовки золотника 4 в случаях, когда давление в управляющих полостях 14 в гидравлической нейтрали больше или меньше заданного, устанавливают золотник 4 в положение, обес- печивающее необходимые значения давлений последовательно в каждой из полостей 14, определяют фактические значения перекрытий для этих положений.
вычисляют необходимую величину съема и подшлифовывают сливные или напорные кромки. С целью получения данных для под- шлифовки золотника в случае, когда зона нечувствительности превышает допустимую, вычисляют разности между, действительными и заданными границами зоны нечувствительности, вычисляют величину съема и подшлифовывают сливные и напорные кромки.
Устройство работает следующим образом.
Предварительно производится нормализация сигналов с датчиков 10, 11 давления для обеспечения у каждого из них одинакового коэффициента передачи. Для этого-за даются вначале общим сопротивлением пары корректирующих сопротивлений 19 (например, 1 кОм), включенных последовательно с сопротивлением датчика 11 давления, при одном из положений переключателя 20. Для других пар корректирующих сопротивлений 19 при иных положениях переключателя 20 это общее сопротивление также должно сохраняться, чтобы не изменялась величина тока, протекающего через датчик 11. После этого датчик 10 давления идентифицируется по .выходным сигналам с датчиком 11 путем постановки двух нормализующих сопротивлений 18. Эти операции выполняются в связи с тем. что датчики давления одного типа имеют разброс по начальному сопротивлению RO и по общему сопротивлению Кобщ. что приводит к разбросу показаний при решении зависимости
AU-P,
где Up - напряжение, снимаемое с движка датчика;
URO - напряжение при отсутствии давления;
Ди - приращение напряжения на единицу давления;
Р-давление.
Сочетание сопротивлений R « и подбирают в паре таким образом, .чтобы, равновесие системы достигалось при требуемых значениях давлений Pi и Pz. Так, для работы в составе устройства для осуществления способа контроля золотниковых распределителей в процессе их доводки подбираются корректирующие сопротивления 19, обеспечивающие условия
- положение гидравлической нейтрали;
Pi-P2 -0,05Po - правая граница зоны нечувствительности;
Pi-P2 +0,05Po - левая граница зоны нечувствительности;
Pi-P2 ± ДР| - контрольные точки си ловой характеристики.
5Число каналов для обеспечения перепадов давления A PI определяется конкретными условиями контроля.
Итак, схема 9 управления настроена так, чтобы обеспечить в сочетании с сигна0 лами сдатчиков 10 и 11 устойчивое равно- весне измерительного контура при требуемых по техническим условиям значениях разности давлений.
Обычно это три характерные точки: по5 ложение гидравлической нейтрали и границы зоны нечувствительности. Для каждого из этих положений предназначена одна пара корректирующих сопротивлений 19. При постановке в схеме 9 управления
0 переключателя 20 в одно из рабочих положений информация об истинных величинах Pi и Р2 после преобразования и коррекции поступает в блок 7 сравнения. Имеющееся рассогласование давлений выравнивается
5 смещением золотника А. Таким образом, система постоянно следит за значениями давлений в управляющих полостях, автоматически устанавливая золотник 4 в заданные положения. Все перемещения зо0 лотника регистрируются отсчетным устройством в виде регистрограмм.
Ф о р м у л а и з о б р е т е н и я
5 чающий подвод к распределителю рабочей жидкости и последующее измерение гидравлических параметров потока через рабочие щели в процессе смещения золотника в пределах рабочего хода, отличающийся
0 тем, что, с целью повышения точности контроля золотниковых распределителей в процессе их доводки и обеспечения автоматизации контроли золотников с положительным перекрытием, в качестве
5 измеряемого гидравлического параметра принимают перепад давлений между управляющими полостями распределителя, а соб- ственнр контроль проводят в условиях динамического состояния замкнутого конт0 рольного контура регулирования, в котором . распределитель выполняет функцию звена с преобразованием смещение золотника - перепад давлений.
0
перемещений золотника, выполненного в виде микропривода, схема управления связана с цепями питания датчиков давления в блоке замера выходных величин, отсчетное устройство выполнено в виде датчика перемещения золотника и связанного с ним блока динамической регистрации, а блок памяти связан своими входами с выходом блока замера выходных величин и с блоком динамической регистрации перемещения золотника.
Ј
м
64
00
to о о
1
(О
( Начало
Запомнить
ft 4 г , i 1 АО i &г } а-а
3a/70MHt//77&
ЛР/н Ре-Pi ;tp.
ЛРс( Рг-Рсл;Рм АРС2 Pf-Pc/ 6-,
МГУ j ; - X -}
Олредем/яй фяк/яичесхие значемя лерехры/лий
Cf а-(а +Ј) #2 tz-Lz- Cf
,-//г
с г if - Lf - ///
/7
Ж
C2
X №8
Р - fOO+260xrc/cfitl Q0 4 2 л/мин
Яе/rt
cf a -fa+6)
#2 1г-Аг- Јf f/1 L0- t0-#2 С 2 tf - L, - ///
Язноу )
6«ЮШ
От №9
Сместить золотник б положение +ЛР1
ff°- /f 0
/ - лгу гв
(
дь/иисли/яь У//;С2 m CZ/#f
Запомнить
Сместить золотнш S/70/гожеме
Рг° Хгу Ро
Запомнить: /7; HZ; С/
Вычислить M2-Cf n cf/HZ
Вымелить fajvwAy
/7О0Ш/Г1/фО&М
слибмьм кромох
№ :CZ-#/ /77
$Cf Ct-#2-n
(
(Я
Лодш/ шроЈа/7 ь слибнь/е хдомхи
X№f
Щи г Л
Сместить золотник б положение -л,
Р КГ9 Ъ
Запомнить 7 m;Hf;cTДычимиш /Sf;f2
/77 -сг/м
Сместить золотш 0 положение +Х/,г
Р2° ХгуРо
Запомнить /7-Н2;С/
бь/числить H2;Cf /7-С//Я2
BbwvcjwmA fejtuw/- ни лядшлифоДхи наяоднь/s лр0м0/с
fifff W-C2-/77 #Я2--№-Ј/-/7
Лодш/шроботь напорные хромхи
,/C№/
Фи г. 8
Запомнить
Мл; АХ„Р
Запомнить
Ml; #f; 6Cf;ffHZ;
От №/1
дь/чус/шть: Cr
Я0
бй/УиС/ 1/Л7Ь SeJWW#y дашлифодш хромок
AX/i m+1
ffHfzAXj -$CZ dXm
SC1
rr+1
бнг лх„р-$с/
Лодшлифоба/ль слиЗнь/е i/малод- нь/е хромхи
I
X№f
Vue.S
Золомна/яь
W
30ЛОМШ/Я6
fyfij j CJP/
W
$Ct; &#f $H2; ffCf
Редактор С. Кулакова
Составитель С. Анисимов Техред М. Моргентал
Bbwt/c/7t//7 e Щ-ДРГ9 №л
ЩР-ЛРГУ №„,
Ј6WЈ/C/7V/7 6
щЈс/7 б1//яе/7б#0с/яг /7ере/ аду &аЈленЈ/п
г п -
ОА
№м
W /Л/)
0ы ///с/ш/ ю -дел/шщ 0ашлифо6хи /рам /70 значемям
t/y#C/7 fa/7 eJM0C/Xt/
Л00ШЛЈ/1рп00/7 6 l/ffffff00Mb/Ј
нрямхг/
/ГАК/
Фиг./О
Корректор Л. Пилипенко
| Солесос | 1922 |
|
SU29A1 |
