Изобретение относится к приборостроению, а конкретнее - к направляющим прямолинейного перемещения, и может быть использовано для поступательного перемещения оптических элементов точных приборов или элементов измерительных устройств.
Целью изобретения способа является повышение точности регулировки положения ползуна.
Заявленный способ установки ползуна в направляющих прямолинейного перемещения состоит из следующей последовательности действий: поверхности сопряжения ползуна и подвижных замыкающих элементов в местах их сопряжения
выполняют наклонными к оси направляющих так, что они в совокупности образуют поверхность в форме ласточкин хвост. При приложении усилий для перемещения ползуна к замыкающим элементам, сила, действующая на ползун со стороны каждого замыкающего элемента как за счет их под- пружинивания, так и за счет приложения к одному из них усилия перемещения, делится на две взаимоперпендикулярные составляющие, одна из которых направлена вдоль оси направляющих, а другая перпендикулярна поверхности скольжения и направлена к ней. Составляющая силы, перпендикулярная поверхности скольжения, дополнительно
ю о о ел
поджимает ползун в процессе его перемещения к поверхности скольжения. Составляющие силы, направленные вдоль оси направляющих со стороны каждого из замыкающих элементов, в зависимости от направления приложения усилия перемещения, частично компенсируют друг друга и определяют направление перемещения ползуна вдоль оси направляющих. Таким образом обеспечивается легкое упругое, но и устойчивое перемещение ползуна, что и повышает точность его регулировки. Для жесткой фиксации ползуна к замыкающим элементам прикладывают усилия на встречу друг другу. Составляющие этих сил, перпендикулярные поверхности скольжения, наряду с силами упругости, дополнительно поджимают ползун к поверхности скольжения. Составляющие сил, направленные вдоль оси направляющих со стороны каждого из замыкающих элементов, полностью компенсируют друг друга. Это позволяет жестко зафиксировать ползун в необходимом положении с высокой точностью.
Цель изобретения устройства - повышение точности и устранение люфта.
Сущность изобретения заключается в том, что поверхности сопряжения ползуна и замыкающих элементов наклонны к оси направляющих и в совокупности образуют поверхность в форме ласточкин хвост, при этом упругие элементы поджимают ползун через замыкающие элементы к поверхности скольжения станины, а устройства принудительного перемещения связаны с соответст- вующими замыкающими элементами. Совокупность этих признаков приводит к тому, что при перемещении ползун упруго поджат к поверхности скольжения станины, а усилия перемещения от устройств принудительного перемещения прикладываются к замыкающим элементам. В результате усилия перемещения действуют на ползун через замыкающие элементы таким образом, что их составляющая, перпендикулярная поверхности скольжения, направлена к этой поверхности, и дополнительно поджимает ползун в процессе перемещения. Это полностью исключает люфт в устройстве при перемещении и тем самым обеспечивается необходимая точность перемещения ползуна. Возможность использования той же совокупности признаков для жесткого крепления ползуна в необходимом положении также повышает точность его перемещения.
На фиг. 1 и фиг. 2 изображены устройства с различным конкретным выполнением замыкающих узлов и устройств принудительного перемещения.
Направляющие прямолинейного перемещения по фиг. 1 содержат ползун 1, станину 2, имеющую призматический паз, упругие элементы 3 и 4, выполненные в виде пружин
сжатия, узел замыкания, состоящий из двух замыкающих элементов 5 и 6, подвижно закрепленных в дополнительных направляющих станины, и двух узлов принудительного перемещения. Первый узел принудительного перемещения состоит из винта 7 и гайки 8, соединенной со станиной 2, винт 7 соединен с замыкающим элементом 5 через пружину 3. Второй узел принудительного перемещения состоит из винта 9 и гайки 10, соединенной со
станиной 2, винт 9 соединен с замыкающим элементом 6 через пружину 4. Поверхности сопряжения ползуна 1 и замыкающих элементов 5 и б наклонны к оси направляющих и в совокупности образуют поверхность в
форме ласточкин хвост.
Устройство по фиг. 1 работает следующим образом.
Ползун 1 установлен в призматическом
пазу станины 2 и постоянно поджат своей рабочей поверхностью к поверхности скольжения станины пружинами сжатия 3 и 4 через замыкающие элементы 5 и 6. При перемещении ползуна один из замыкающих
элементов, например 6, освобождается от связи с узлом принудительного перемещения выкручивания винта 9 из гайки 10. Путем закручивания винта 7 в гайку 8 противоположного узла принудительного
перемещения воздействуют на замыкающий элемент 5, который в свою очередь воздействует на ползун 1 перемещает его. После достижения ползуном необходимого положения закручивается винт 9 и ползун
зажимается между двумя замыкающими элементами 5 и б и поверхностью скольжения станины 2. При перемещении ползуна 1 в противоположную сторону, замыкающий элемент 5 освобождается от связи с узлом
принудительного перемещения путем выкручивания винта 7 из гайки 8. Путем закручивания винта 9 в гайку 10 противоположного узла принудительного перемещения воздействуют на замыкающий элемент 6, который в
свою очередь воздействует на ползун 1 перемещает его.
Направляющие прямолинейного перемещения по фиг. 2 содержат ползун 1, станину 2, имеющую призматический паз,
упругие элементы 3 и 4, выполненные в виде пружин растяжения, узел замыкания, состоящий из двух замыкающих элементов 5 и 6, подвижно закрепленных в дополнительных направляющих станины, и двух элементов для жесткой связи замыкающих элементов,
выполненных в виде винтов 7 и 8, связанных с замыкающим элементом б по резьбе. Узел принудительного перемещения состоит из фасонного винта 9 и упора 10, соединенного со станиной, фасйнный винт 9 соединен с замыкающим элементом 5 по резьбе. Поверхности сопряжения ползуна 1 и замыкающих элементов 5 и 6 наклонны к оси направляющих и в совокупности образуют поверхность в форме ласточкин хвост. Каждая из пружин растяжения 3 и 4 одним концом закреплена с замыкающим элементом 5, а другаим - с замыкающим элементом б.
Устройство по фиг. 2 работает следующим образом.
Ползун 1 установлен в призматическом пазу станины 2 и постоянно поджат своей рабочей поверхностью к поверхности скольжения станины пружинами растяжения 3 и 4 через замыкающие элементы 5 и 6. При перемещении ползуна вращают фасонный винт 9 в упоре 10, при этом замыкающий элемент 5 движется по винту и воздействуя на ползун и противоположный замыкающий элемент перемещает их. По- еле достижения ползуном необходимого положения закручиваются винты 7 и 8 и ползун зажимается между двумя замыкающими элементами 5 и 6 и поверхностью скольжения станины 2. Данное выполнение устройства предпочтительнее в случае, если доступ к устройству возможен только с одной стороны.
Заявляемые способ установки ползуна в направляющих прямолинейного переме- щения и устройство для его реализации выгодно отличаются от известных технических решений, т. к. их использование позволяет существенно повысить точность перемеще- ния ползуна и регулировки вследствиатого, что данные параметры не изменяют своих значений непосредственно в процессе работы, т. е. в процессе перемещения ползуна. Это особенно важно, например, в случае установки на ползуне многоэлементых фо- топриемников для их юстировки, когда при возникновении люфта непосредственно в процессе перемещения ползуна происходит ухудшение качества сигнала вследствие расфокусировки. Обеспечение фиксации ползуна без введения каких-либо дополнительных элементов также существенно улучшает потребительские свойства предложенных технических решений. Другими достоинствами являются автоматическая компенсация износа в процессе работы и отсутствие высоких точностных требований к отдельным деталям и узлам при высоких выходных точностных характеристиках устройства в целом.
Формула изобретения
1.Способ установки ползуна в направляющих прямолинейного перемещения, заключающийся в упругом перемещении ползуна вдоль оси направляющих и фиксации его в необходимом положении, отличающийся тем, что, с целью повышения точности регулировки положения ползуна, поверхности ползуна и подвижных замыкающих элементов в местах их сопряжения выполняют наклонными к оси направляющих так, что они в совокупности образуют поверхность в форме ласточкина хвоста, усилия для упругого перемещения прикладывают к ползуну через подпружиненные подвижные замыкающие элементы, а фиксацию положения относительно поверхности скольжения осуществляют зажимом ползуна с двух сторон в направлении оси направляющих навстречу друг к другу.
2.Направляющие прямолинейного перемещения, содержащие ползун, станину, имеющую призматический паз, упругий элемент, отличающиеся тем, что, с целью повышения точности и устранения люфта, устройство содержит по меньшей мере один упругий элемент и снабжено узлом замыкания, состоящим по меньшей мере из двух замыкающих элементов, подвижно закрепленных в дополнительных направляющих станины, и по меньшей мере одним узлом принудительного перемещения, соединенным со станиной, поверхности сопряжения ползуна и замыкающих элементов наклонны к оси направляющих и в совокупности образуют поверхность в форме ласточника хвоста, упругий элемент и узел принудительного перемещения связаны с соответствующими замыкающими элементами.
3.Направляющие по п. 2, о т л и ч а ю- щ и е с я тем, что каждый упругий элемент выполнен в виде пружины сжатия, а каждый узел принудительного перемещения - в виде винта и гайки, винт соединен с соответствующим замыкающим элементом через пружину.
4.Направляющие по п. 2. о т л и ч а ю- щ и е с я тем, что узел замыкания снабжен по меньше мере одним элементом для жесткой связи замыкающих элементов выполненным например в виде винта, связанным с одним из замыкающих элементов по резьбе, а с другим - по отверстию, упругий элемент выполнен в виде пружины растяжения, закрепленной одним концом на одном замыкающем элементе, а другим - на другом замыкающем элементе, узел принудительного перемещения выполнен в виде фасонного
винта и упора, и соединен с соответствующим замыкающим элементом по резьбе.
5. Направляющие по п. 3, о т л и ч а ю- щ и е с л тем, что устройство содержит два упругих элемента и два узла принудительно- го перемещения.
6. Направляющие по п. 4, о т л и ч а ю- щ и е с я тем, что устройство содержит два упругих элемента и один и узел принудительного перемещения, узел замыкания содержит два элемента для жесткой связи замыкающих элементов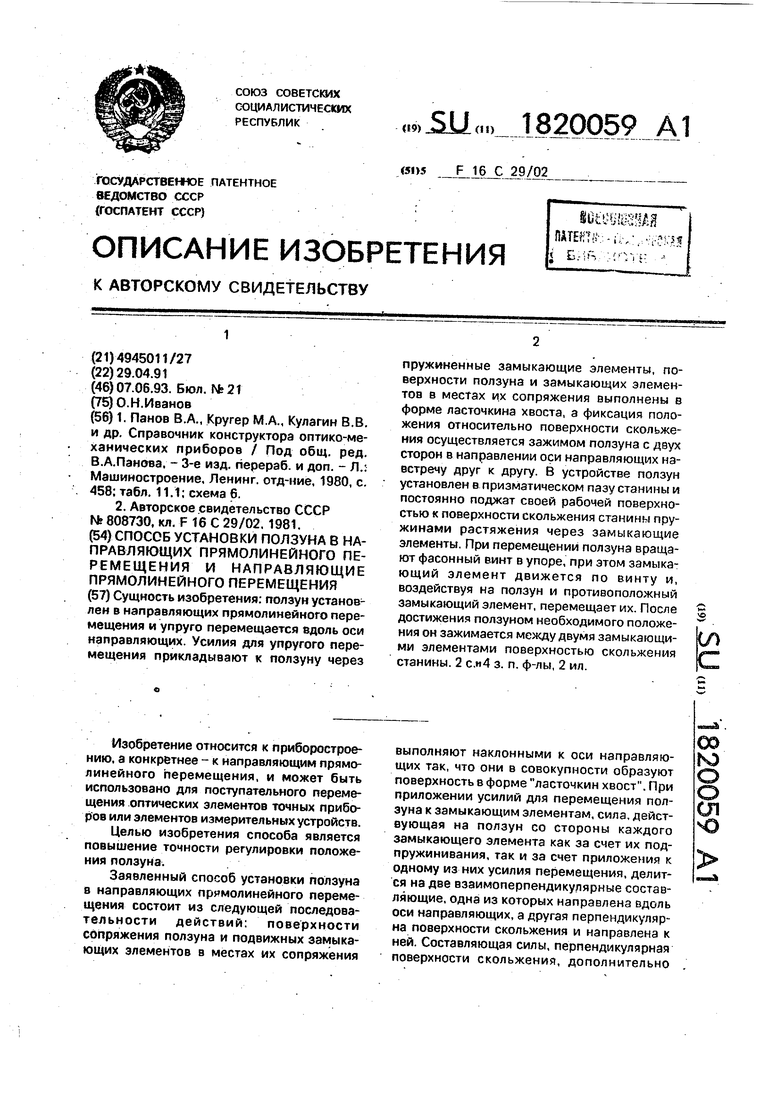


| название | год | авторы | номер документа |
|---|---|---|---|
| Подшипник скольжения | 1991 |
|
SU1820060A1 |
| Направляющие скольжения прямоли-НЕйНОгО пЕРЕМЕщЕНия | 1979 |
|
SU808730A1 |
| Направляющие скольжения прямолинейного перемещения | 1986 |
|
SU1340963A1 |
| Способ изготовления направляющей скольжения | 1980 |
|
SU1009693A1 |
| КЛИНОВОЙ МЕХАНИЗМ С ПРИЕМНИКОМ ПОЛЗУНА | 2008 |
|
RU2461463C2 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| Направляющие скольжения | 1980 |
|
SU894232A1 |
| НАПРАВЛЯЮЩИЙ УЗЕЛ | 1992 |
|
RU2028907C1 |
| Направляющий механизм пильной рамки лесопильной рамы | 1986 |
|
SU1414644A1 |
| Устройство для отбортовки цилиндрических изделий | 1985 |
|
SU1329866A1 |

Сущность изобретения: ползун установлен в направляющих прямолинейного перемещения и упруго перемещается вдоль оси направляющих. Усилия для упругого перемещения прикладывают к ползуну через пружиненные замыкающие элементы, поверхности ползуна и замыкающих элементов в местах их сопряжения выполнены в форме ласточкина хвоста, а фиксация положения относительно поверхности скольжения осуществляется зажимом ползуна с двух сторон в направлении оси направляющих навстречу друг к другу. В устройстве ползун установлен в призматическом пазу станины и постоянно поджат своей рабочей поверхностью к поверхности скольжения станины пружинами растяжения через замыкающие элементы. При перемещении ползуна вращают фасонный винт в упоре, при этом замыкающий элемент движется по винту и, воздействуя на ползун и противоположный замыкающий элемент, перемещает их. После достижения ползуном необходимого положения он зажимается между двумя замыкающими элементами поверхностью скольжения станины. 2 с.и4 з. п. ф-лы, 2 ил. « (Л
Физ.1
9 10
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Панов В.А., Кругер М.А., Кулагин В.В | |||
| и др | |||
| Справочник конструктора оптико-механических приборов / Под общ | |||
| ред | |||
| В.А.Панова | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| перераб | |||
| и доп | |||
| - Л.: Машиностроение, Ленинг | |||
| отд-ние, 1980, с | |||
| Приспособление для отопления печей нефтью | 1922 |
|
SU458A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Направляющие скольжения прямоли-НЕйНОгО пЕРЕМЕщЕНия | 1979 |
|
SU808730A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
