Изобретение относится к машиностроению, а именно к кривошипно-ша- тунным преобразователям вращательного движения в прямолинейно-поступательное движение и наоборот. Изобретение может найти применение, в частности, в шагающих движителях, манит пуляторах и других устройствах.
Известен прямолинейно-направляю- щмй механизм, содержащий стойку, шарнирно связанные с ней одними концами соответственно кривошип и коромысло лямбдообразного механизма Чебышева/j шатун которого одним концом шарнирйр Связан с кривошипом и коромыслом, а: другим - со средней частью двуплечег го рычага, шарнирно связанного с дополнительным коромыслом.
Недостатком указанного механизма является относительно малый угол поворота кривошипа при перемещении выходного элемента по приблизительно- прямолинейному участку
Цель изобретения - расширение кинематических возможностей путем увеличения угла поворота кривошипа
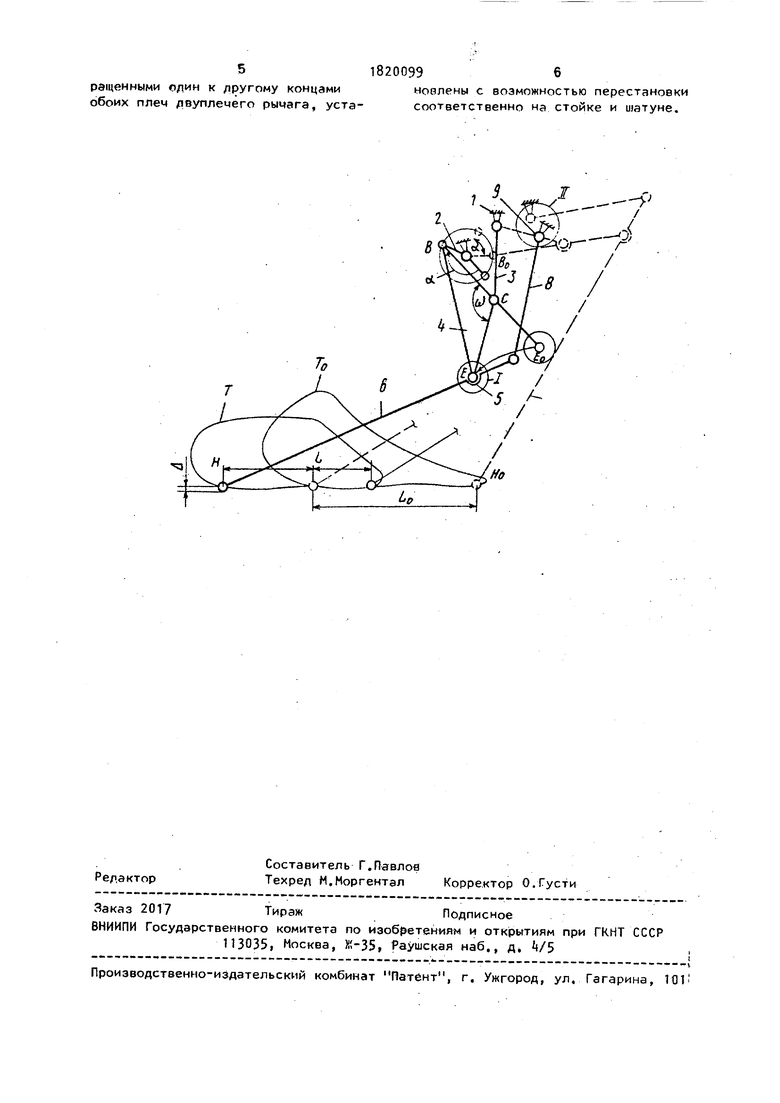
На чертеже приведена кинематическая схема предлагаемого механизмас
Прямолинейно-направляющий механизм содержит стойку 1, шарнирно связанные с ней одними концами соответственно кривошип 2 и коромысло 3„ Вторые концы кривошипа и коромысла соединены с шатуном Ц, выполненным в виде треугольника, шарнирами, расположенными на двух вершинах треугольника. Шарнир
00
ю о о ю ю
5, расположенный на третьей вершине треугольника, соединен с обращенными одним к другому концами обоих плеч двуплечего рычага 6, конец одного плеча которого шарнирно связан со свободным концом дополнительного коромысла 7, установленного на шарнире 8 стойки 1,
При выборе оптимальных размеров звеньев механизма и местоположения третьего шарнира 5 шатуна , предназначенного для соединения с двуплечим рычагом 6 в пределах угла оЭ, обрэзо
соединяющей шарниры коромысла 3 И обращенных один к другому концов обоих плеч двуплечего рычага 6, в диапазоне -20°Ј и & 165°, возможен поворот кривошипа 2 на угол oLt не меньший 120°, и возможно получение разных траекторий 9 движения выходного элемента 10, расположенного на свободном конце двуплечего рычага 6.
Расстояние между шарнирами механизма обозначены буквами и могут быть
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (2 ВАРИАНТА) | 2004 |
|
RU2281352C1 |
| СНЕГОУБОРОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2010082C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |
| ШАГАЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2801819C2 |
| ДОРОЖНО-УБОРОЧНАЯ МАШИНА | 1991 |
|
RU2029819C1 |
| Шагающий движитель транспортного средства | 1988 |
|
SU1625757A1 |
| ПОРШНЕВАЯ МАШИНА, ПРЕИМУЩЕСТВЕННО ДВИГАТЕЛЬ, СНАБЖЕННАЯ ПРЯМИЛАМИ УАТТА | 2015 |
|
RU2612868C2 |
Изобретение относится к машиностроению, а именно к кривошипно-ша- тунным преобразователям вращательного движения в прямолинейно-поступательное и наоборот. Цель изобретения - расширение кинематических возможностей путем увеличения угла поворота кривошипа„ Прямолинейно-направляющий механизм содержит стойку 1, шарнирно связанные с ней одними концами соответственно кривошип 2 и коромысло 3, другие концы которых соединены с шатуном 4, выполненным в виде треугольника, шарнирами, расположенными на двух вершинах треугольника. -Шарнир 5 предназначен для соединения третьей вершины шатуна Ь с двуплечим рычагом 6„ Конец одного плеча двуплечего рычага 6 шарнирно связан со свободным концом дополнительного коромысла 7, установленного, на шарнире 8 стойки 1. Шарнир 5 на шатуне и шарнир 8 на стойке 1 установлены с возможностью перестановки. 1 ил. (Л С
ванного прямой, соединяющей шарниры i jg например, выражены следующими сооткривошипа 2 и коромысла 3, и прямой,
ношениями их длин.
АВ
1
1
СCDADСЕBEEHEF KFDK AKCO
2,822,661,552,985,0811,001,684,671,7 2,82124°
2,462,341,241,743,226,62,003,001,78 2,77131°
При вращении кривошипа 2 двуплечий рычаг 6, ведомый шарнирами шатуна Ь и дополнительного коромысла 7, выходным элементом 10 описывает замкнутую траекторию 9, мало отличающуюся в пределах I, от прямой.
При изменении некоторых размеров элементов, а именно, при одновремен- ном изменении угла оэ размещения шарнира 5 и местоположения шарнира 8 дополнительного коромысла 7 на стойке 1, возможно изменение формы траектории 9 движения выходного элемента 10 с сохранением расположения ее приблизительно-прямолинейного участка траектории приблизительно вдоль одной прямой. Например на фиг„1 при-, веден такой случай, где прямолиней- ные участки прямолинейно-направляющих механизмов, один из которых выполнен на основе механизма Чебышева (штриховая линия), а другой - на основе предложенного, приблизительно расположены вдоль одной прямой„
Таким образом с одновременным изменением угла Q размещения шарнира 5 на шатуне k и местоположения шарнира 8 дополнительного коромысла 7 на стойке 1, возможно управление величиной угла оЈ поворота кривошипа и получаемой Формой траектории 9 движения выходного элемента 100 И в конечном счете можно добиться приблизительного слияния участка L с траекторией движения обратного хода выходного элемента 10.
ношениями их длин.
0
5
Формула изобретения
2„ Механизм по п., 1 , о т л и ч а- ю щ и и с я тем, что шарниры, предназначенные соответственно для соединения одного из концов дополнительного коромысла со стойкой и для соединения третьей вершины шатуна с об51820099 6
ращенными один к другому концами новлены с возможностью перестановки обоих плеч лвуплечего рычага, уста- соответственно на стойке и шатуне.
| Артоболевский И.И„ Механизмы в современной технике, М,: Машиностроение, 1979, т 1} рис, | |||
| Замедляющая система типа "лестница" | 1975 |
|
SU519099A1 |
