Изобретение относится к транспортному машиностроению, в частности к движителям транспортных средств высокой проходимости.
Цель изобретения - устранение верти- кальных колебаний корпуса при изменении шага опоры.
На чертеже показан движитель, общий вид.
Шагающий движитель содержит верти- кально установленную стойку 1, на конце которой на шаровом шарнире 2 закреплен башмак 3. Вверху стойка 1 шарнирно соединена с шатуном 4, который совместно с основанием 5, коромыслом б и кривошипом 7 составляет прямолинейно-направляющий механизм Чебышева. Со звеньями 4 и 6 механизма Чебышева совмещен двойной шар- нирный параллелограмм, жестко присоединенный ведомым звеном 8 к стой- ке 1, а ведущим звеном 9 к основанию 5 и замыкающийся связанными шарнирно между собой звеньями 10-12. Шатун 4 шарнирно связан с ползуном 13, установленным подвижно на кривошипе 7 и перемещающимся по нему при помощи гидроцилиндра 14 (привод вращения кривошипа 7 не показан). Кривошип 7 шарнирно соединен с ползуном 15, подвижноустанов- ленным на основании 5, и перемещающим- ся по нему гидроцилиндром 16, корпус которого неподвижно закреплен на его продолжении. Основание 5 поворотно смонтировано на корпусе 17 транспортного средства с помощью двигателя 18 и редук- тора 19. Изменение длин кривошипа 7 и основания 5 контролируется датчиками (не показаны).
При вращении кривошипа 7 конец шатуна 4 со стойкой 1 описывает замкнутую траекторию, нижняя часть которой приблизительно прямолинейна и соответствует фазе опоры, а верхняя криволинейна и соответствует фазе переноса, причем у башмака 3 создается такая же траектория 20,
поскольку описанный выше двойной шарнирный параллелограмм не позволяет стойке 1 отклоняться от вертикального положения в любых точках траектории конца шатуна.
Для изменения шага необходимо гидроцилиндром 16 изменить расстояние между ползуном 15 и ведомым звеном, причем при уменьшении этого расстояния шаг уменьшается, и наоборот, Для сохранения при этом прямолинейности нижней части траектории 20 необходимо изменять длину кривошипа 7, что достигается перемещением дополнительного ползуна 13 при помощи гидроцилиндра 14 на необходимое расстояние, которое подбирается опытным путем или с помощью командно-временного устройства (не показано), которое на основании сигналов датчиков выполняет это автоматически.
Для поворота транспортного средства шаг движителей разных бортов меняется илидвижители поворачивают двигателем 18 на необходимые углы. При повороте движителей возможно также осуществить движение транспортного средства боком.
Формула изобретения
Шагающий движитель транспортного средства, содержащий опору, шарнирно соединенную с одним концом шатуна прямолинейно-направляющего механизма Чебышева, к основанию которого присоединен шарнир коромысла и ползун с шарниром кривошипа, связанным с приводом его перемещения в направлении шарнира коромысла, отличающийся тем, что, с целью устранения вертикальных колебаний корпуса при изменении шага опоры, кривошип образован направляющей, на которой установлен соединенный с приводом его передвижения дополнительный ползун, несущий шарнир другого конца шатуна, а опора соединена с основанием двойным шарнирным параллелограммным механизмом.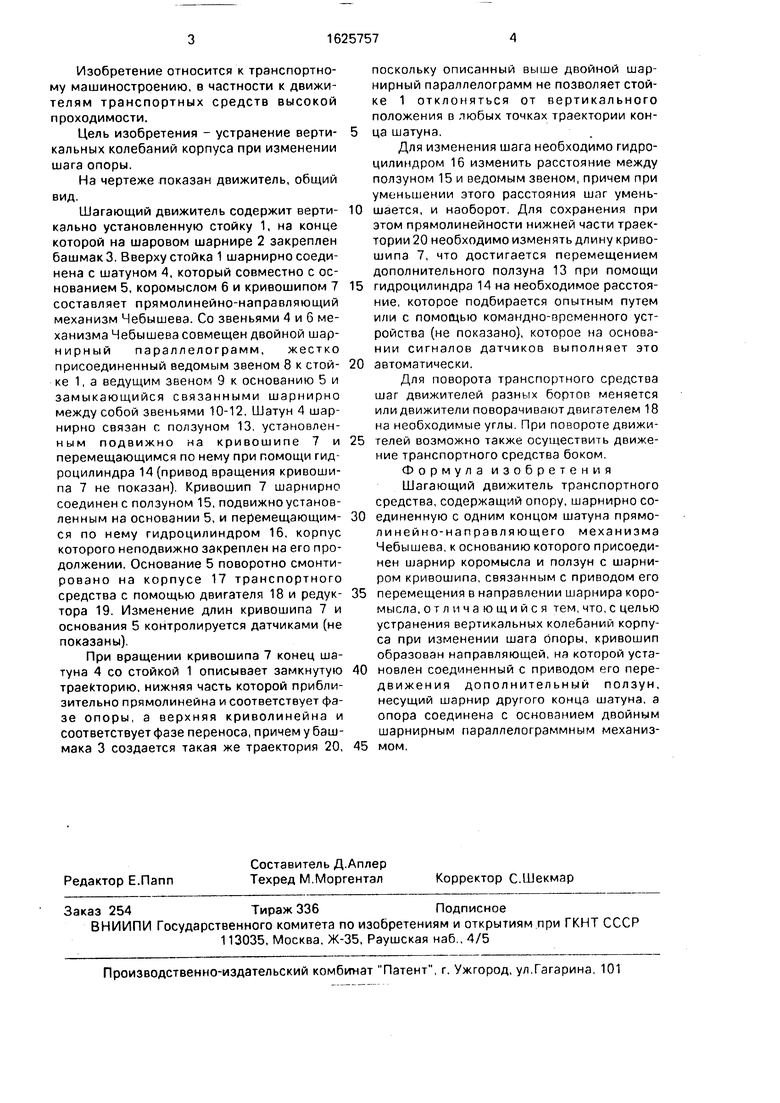
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| Шагающий движитель транспортного средства | 1981 |
|
SU988635A1 |
| МЕХАНИЗМ ШАГАЮЩЕЙ МАШИНЫ | 2017 |
|
RU2712370C2 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| ШАГАЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2801819C2 |
| Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот | 2018 |
|
RU2734175C2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1820099A1 |
| ПЕРЕДВИЖНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2137700C1 |
Изобретение относится к движителям высокой проходимости. Цель изобретения - устранение вертикальных колебаний корпуса при изменении шага опоры. Движитель состоит мз опоры, шарнирно прикрепленной к одному концу шатуна 4 прямолинейП 16 но-направляющего механизма Чебышева, к основанию 5 которого присоединены шарниры коромысла 6 и ползун 15 с шарниром кривошипа 7. Последний выполнен в виде направляющей, на которой установлен соединенный с приводом дополнительный ползун 13 с установленным на нем шарниром другого конца шатуна 4. Опора 1 соединена с основанием 5 двойным шарнирным параллелограммом. При вращении кривошипа башмак 3 совершает траекторию 20, в которой фаза опоры - приблизительно прямоли; нейна, а фаза переноса - выпуклая кривая. Для изменения шага приводом 16 изменяют положение точки подвеса кривошипа 7, а для сохранения прямолинейности фазы опоры приводом изменяют положение ползуна 13. 1 ил. (Л С о ю СЛ VI СЛ XI W , /// //7 ///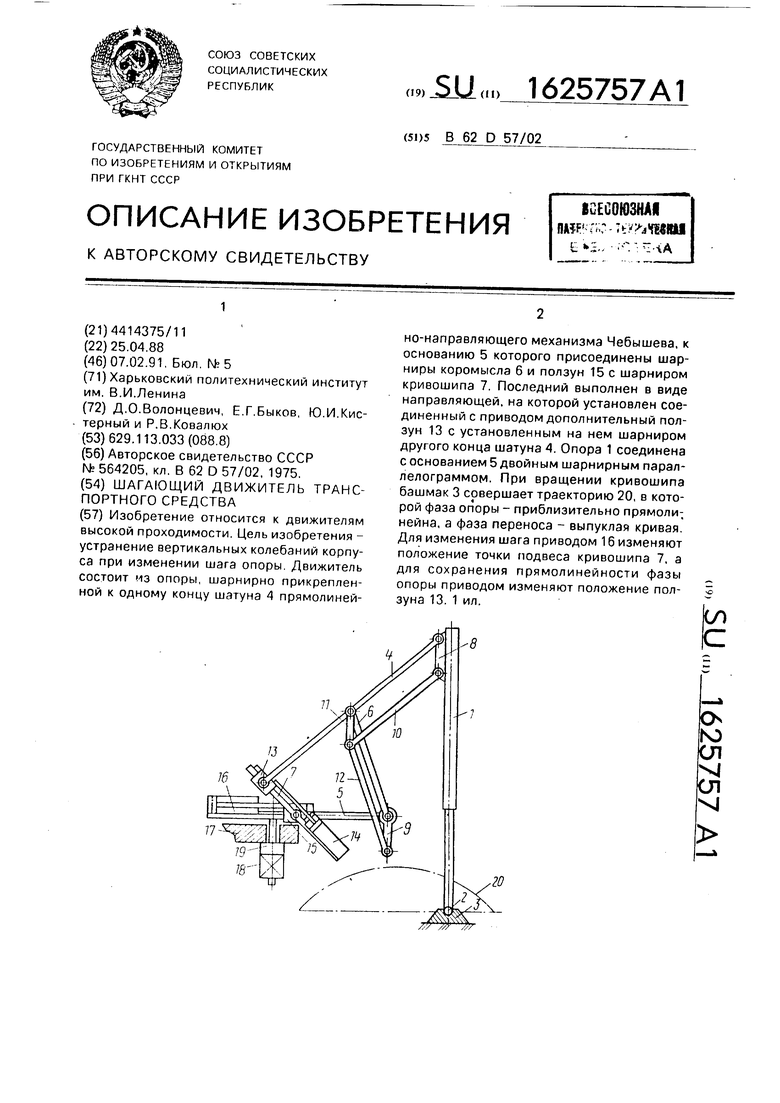
| Самоходное транспортное средство | 1975 |
|
SU564205A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
