Изобретение относится к области шагающих машин и механизмов, обеспечивающих движение шагоходов.
Известны несколько типов шагающих машин.
Классической шагающей машиной считается «Переступающая машина», или, что то же самое, «Стопоходящая машина», предложенная Пафнутием Львовичем Чебышевым в 1878 году (И.И. Артоболевский, Н.И. Левитский. Механизмы П.Л. Чебышева / В кн.: Научное наследие П.Л. Чебышева. Вып. И. Теория механизмов. - М. - Л.: Изд-во АН СССР. 1945. С. 52-54). Это первый аналог предлагаемого технического устройства. Экспонаты «Стопоходящей машины» хранятся в Политехническом музее в Москве (Отдел Автоматики; ПМ №19472) и в Музее истории Санкт-Петербургского университета. Компьютерная реконструкция работы «Стопоходящей машины» с детальным изображением действия механизмов выполнена Н.Н. Андреевым и его командой (https://etudes.ru/etudes/tchebvshev-plantigrade-machine/). В этой машине есть два главных недостатка. Во-первых, верхнее расположение шагающей траектории рабочей опорной точки, тогда как основные силовые опоры должны находиться ниже корпуса машины. Во-вторых, сложная диагональная синхронизация работы четырех лямбдаобразных механизмов, предложенных тоже Пафнутием Львовичем Чебышевым (О преобразовании вращательного движения в движение по некоторым линиям при помощи сочлененных систем / По кн.: Полное собрание сочинений П.Л. Чебышева. Том IV. Теория механизмов. - М. - Л.: Изд-во АН СССР. 1948. С. 161-166).
Для переноса рабочей шагающей траектории ниже корпуса машины применяются различные способы. Например, Анастасия Андреевна Скворцова в своем изобретении «Механизм шагающей машины» предлагает дополнить лямбдаобразный механизм П.Л. Чебышева двойным параллелограммом, который переносит рабочую точку шагающей траектории вниз на любое заданное расстояние, определяемое длиной вертикальной стороны параллелограмма (Патент на изобретение RU №2712370. Заявка RU №2017138076. Приоритет изобретения 01 ноября 2017 г. Дата государственной регистрации в Государственном реестре изобретений 28 января 2020 г. https://yandex.ru/patents/doc/RU2017138076A_20190506). Это второй аналог предлагаемого технического устройства. Недостатком этого механизма является одиночная точка, которая двигается по шагающей траектории. Для медицинского тренажера, который разработала А.А. Скворцова, такой перенос обоснован, потому что пациент ставит ногу на опору именно в одной рабочей точке машины. Однако для надежной опоры на поверхность, чаще всего на землю, одной точки мало, нужна площадка, как, например, у ступни человека или копыта животного. Опора малой площади провалится в грунт из-за большого создаваемого ею давления.
С точечными опорами на землю связаны механизмы Тео Янсена (Видеолекция: https://theoryandpractice.ru/videos/711-teo-yansen-iskusstvennye-forrny-zhizni). Это третий аналог предлагаемого нового технического устройства. В механизмах Тео Янсена рабочая траектория опорной точки приближается к классической, как у П.Л. Чебышева, но все-таки далека от нее. Следствием этого является невозможность установить пластину на опорные рычаги. Во всех механизмах Тео Янсена опора происходит на небольшой кулачок, фактически на точку. Такая конструкция механизма связана с рекламной целью «Шагающих монстров» и «Пляжных монстров», которые автор создавал в основном для передвижения под действием ветра на берегу моря по песчаным поверхностям, но не для транспортных целей.
Четвертый аналог предлагаемого нового устройства - это механизм Кланна (Патент US 6260862 B1, Walking device, Joseph C.Klann). Этот механизм хорошо передвигается по твердым каменистым поверхностям, опираясь тоже на точечную опору, но не на пластину, подобную стопе человека. Недостатком механизма Кланна является невозможность установить опорную пластину достаточной площади, чтобы машина не провалилась на слабых грунтах, например, на заболоченной почве.
Пятый аналог - «Шагающее колесо» Виктории Сергеевны Жуковой, которое стало новым транспортным средством (Заявка на патент №2018504370 от 09.10.208 г. Патент на изобретение RU 2734175. - Бюл. №29 от 13.10.2020 г). В.С. Жукова предложила перевернуть шагающий механизм П.Л. Чебышева, разместить по кругу несколько перевернутых механизма, перейти к роторной схеме, то есть сделать вращающимся неподвижное звено лямбдаобразного механизма П.Л. Чебышева. Главная суть предложения В.С. Жуковой - переворот механизма для смещения рабочей шагающей траектории ниже корпуса машины. Но тогда шагающая траектория тоже переворачивается, и теряет смысл назначение прямолинейного рабочего участка. Чтобы сохранить принцип шагающего движения автор предлагает использовать вместо прямолинейного рабочего отрезка траектории малый участок дуги, на котором искривление траектории не очень большое. Преимущество - не нужно дополнительных механизмов и усложнения конструкции, недостаток - шагающая траектория все-таки теряет свое основное назначение.
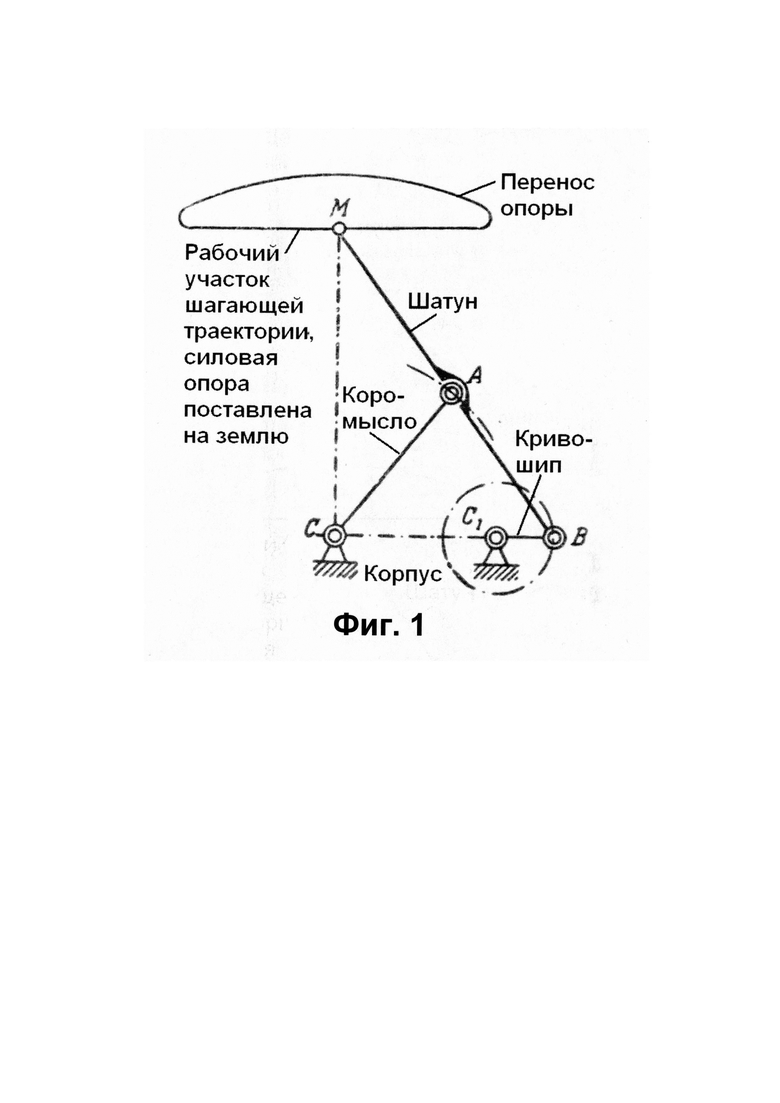
В качестве прототипа к новому предлагаемому техническому решению по большинству существенных совпадающих признаков выбран ближайший аналог «Стопоходящая машина», предложенная Пафнутием Львовичем Чебышевым в 1878 году (И. И. Артоболевский, Н.И. Левитский. Механизмы П.Л. Чебышева / В кн.: Научное наследие П.Л. Чебышева. Вып. П. Теория механизмов. - М.-Л.: Изд-во АН СССР. 1945. С. 52-54). В основу этой машины положены четыре лямбдаобразных механизма П.Л. Чебышева. Кинематическая схема лямбдаобразного механизма П.Л.Чебышева показана на фиг. 1, рисунок взят из статьи П.Л. Чебышева и дополнен поясняющими надписями с названиями рычагов и участков шагающей траектории (О преобразовании вращательного движения в движение по некоторым линиям при помощи сочлененных систем / По кн.: Полное собрание сочинений П.Л. Чебышева. Том IV. Теория механизмов. - М.-Л.: Изд-во АН СССР. 1948. С. 161-166). Это плоский шарнирно-рычажный механизм. Механизм состоит из неподвижного корпуса, к которому крепятся шарниры С и C1. Кривошип C1B совершает вращательное движение вокруг шарнира С1. К другому шарниру С крепится коромысло АС. Шатун МАВ крепится двумя шарнирами: одним шарниром В - к кривошипу C1B, вторым шарниром А - к коромыслу АС. Рабочая точка М шатуна МАВ двигается по шагающей траектории, показанной вверху чертежа. В шагающей траектории нижний почти прямолинейный участок является рабочим и соответствует фиксации силовой опоры на земле при перемещении корпуса машины относительно земли. Верхний участок шагающей траектории в виде дуги является пассивным и соответствует переносу силовой опоры для следующего шага.
Первый недостаток лямбдаобразного шагающего механизма П.Л. Чебышева заключается в том, что единичный механизм нельзя применить в шагающей машине. Как минимум, в шагающей машине должно быть два лямбдаобразных механизма, работающих в противофазе. Когда силовая опора одного лямбдаобразного механизма движется по нижнему рабочему прямолинейному участку шагающей траектории, упирается в землю и поддерживает машину, силовая опора второго лямбдаобразного механизма приподнята над землей, двигается по дуге шагающей траектории и переносится вперед для последующего шага.
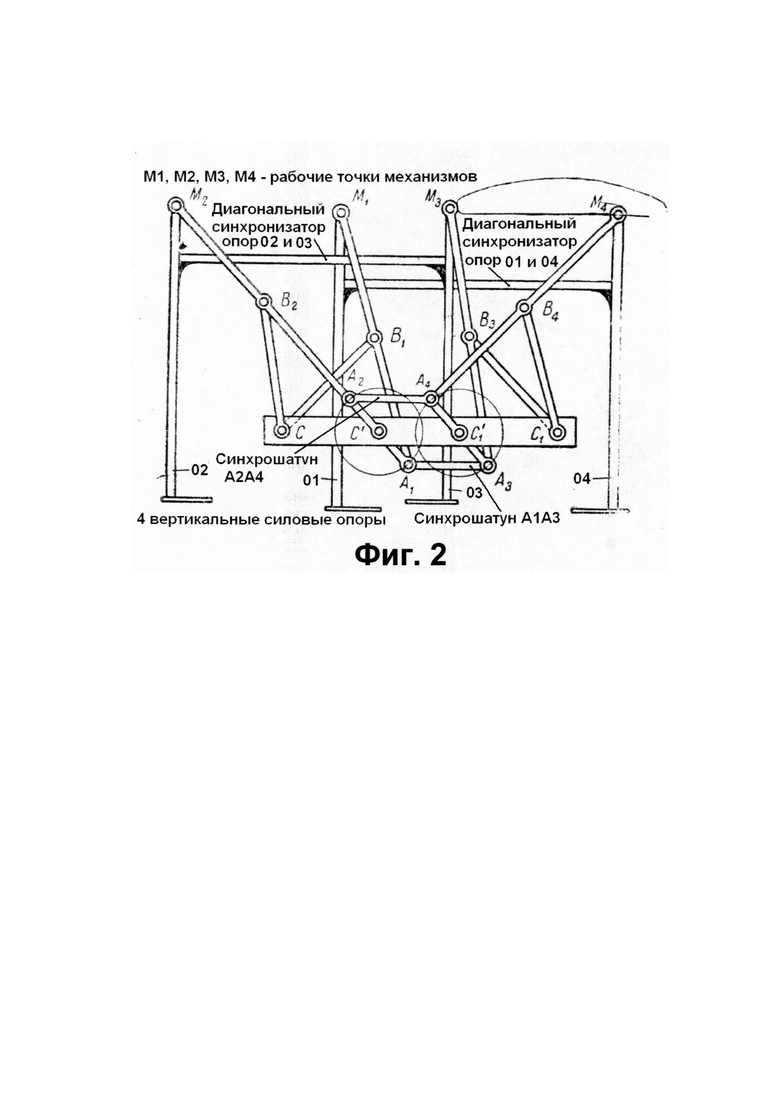
Второй недостаток лямбдаобразного механизма заключается в том, что на практике для создания шагающей машины требуется даже не два, а четыре таких механизма. Два механизма обеспечивают сравнительно небольшую опорную площадь, поэтому устойчивость шагающей машины небольшая. Обеспечение устойчивости требует дополнительных мер и механизмов, например, обратного маятника, как у человека: когда человек шагает вперед правой ногой, то он слегка отклоняется влево и переносит центр тяжести на опору левой ноги. Потом, наоборот. Машины с двумя шагающими механизмами относятся к сложным двухопорным системам, например, к антропоморфным роботам, в этом техническом решении не изучаются и не рассматриваются. В выбранном прототипе, то есть в «Стопоходящей машине», П.Л. Чебышев применил четыре лямбдаобразных механизма. На фиг. 2 показана схема стопоходящей машины П.Л. Чебышева, заимствованная из его статьи и дополненная поясняющими надписями (И. И. Артоболевский, Н.И. Левитский. Механизмы П.Л. Чебышева / В кн.: Научное наследие П.Л. Чебышева. Вып. II. Теория механизмов. - М.-Л.: Изд-во АН СССР. 1945. С. 52-54). Просто прикрепить вертикальную опору шарнирно к рабочей точке шатуна нельзя, потому что добавится еще одна степень свободы уже нового механизма, с опорой, и машина упадет. При шарнирном добавлении четырех вертикальных силовых опор к четырем лямбдаобразным механизмам добавятся четыре степени свободы, поэтому без дополнительных мер новая конструкция не будет устойчивой. Чтобы убрать лишние степени свободы и оставить только одну степень свободы нового механизма, соответствующую углу поворота ведущего вала привода машины, П.Л. Чебышев добавил три типа дополнительных рычагов. Во-первых, это два кривошипных синхрошатуна A1A3 и А2А4, связывающие повороты пар кривошипов CA2-C1A4 и СА1-С1А3. Во-вторых, это два общих вала С и С1, на концах которых в противофазах поворачиваются связанные валами пары кривошипов СА2-СА1 и С1А4-С1А3. В-третьих, добавлена пара диагональных жестких рычагов-синхронизаторов, неразъемно связанных с вертикальными силовыми опорами 02-03 и 01-04 соответственно. При таких четырех жестких связях две опоры 02 и 03 превратились в единое кинематическое звено, то есть в одну неразъемную деталь - пару вертикальных силовых опор 02-03. Точно также две вертикальные силовые опоры 01 и 04 превратились в другое единое кинематическое звено, то есть в одну неразъемную деталь - пару вертикальных силовых опор 01-04. Таким образом, «Стопоходящая машина» П.Л. Чебышева приобрела одну степень свободы - угол поворота ведущего вала привода, например, угол поворота вала С.
Новое техническое предложение позволяет синхронизировать работу пары лямбдаобразных механизмов П.Л.Чебышева силовым опорным синхрошатуном, который с кинематической точки зрения является пассивным кинематическим звеном предлагаемого нового механизма, то есть не влияет на движение других рычагов, но служит для иных целей: увеличение прочности, уменьшение деформаций рычагов, обеспечение устойчивости движения и т.д.
Цель нового технического предложения заключается в надежном смещении шагающей траектории рабочей точки шатуна ниже корпуса транспортного средства. Для этого пара лямбдаобразных механизмов П.Л. Чебышева дополняется не только синхрошатуном на кривошипах А1А3, как показано на фиг. 2, но еще одним новым элементом - силовым опорным синхрошатуном, пассивным кинематическим элементом, который не влияет на движение других рычагов механизма, но который одновременно может выполнять функции вертикальной силовой опоры.
Для доказательства работоспособности предлагаемого технического решения была изготовлена модель нового шагающего механизма, на которой были изучены все возможные варианты расположения рычагов и дополнения нового технического решения новыми существенными элементами.
Суть предлагаемого нового технического решения поясняется следующими чертежами. На чертежах сохранены термины, которые были указаны в выбранном прототипе П.Л. Чебышевым.
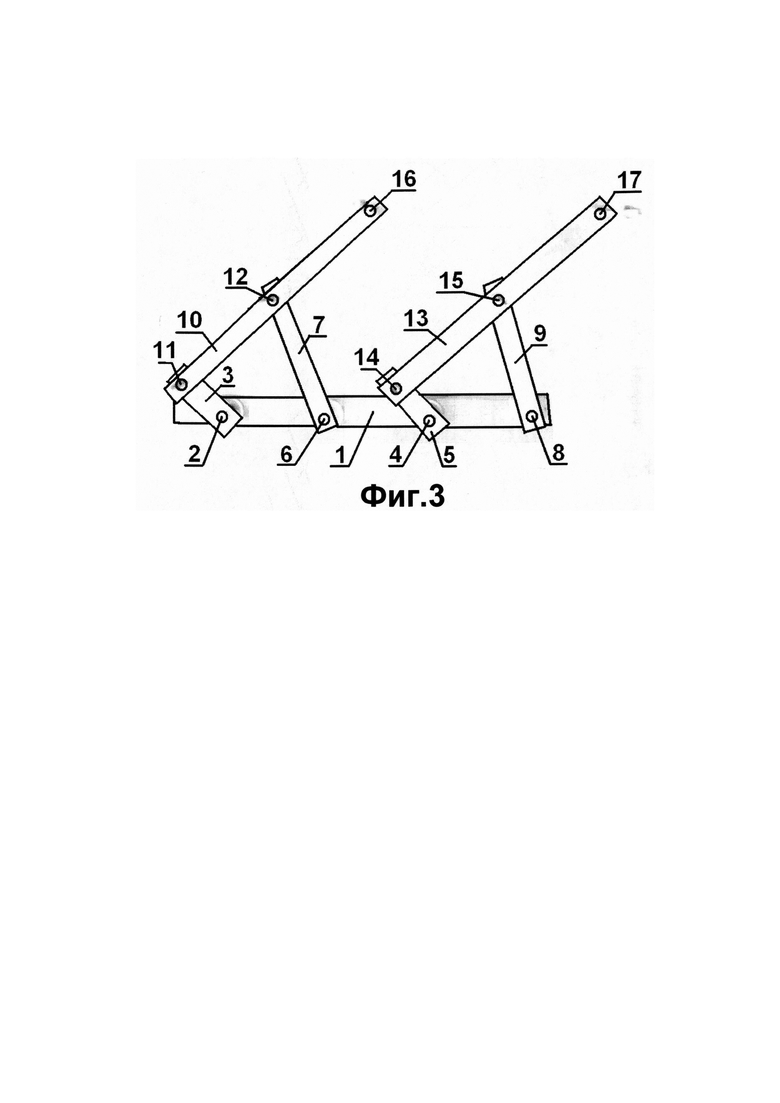
На фиг. 3 показана пара отдельных друг от друга, не зависимых друг от друга лямбдаобразных механизмов П.Л.Чебышева. На корпусе 1 расположены: неподвижный шарнир 2 кривошипа 3, неподвижный шарнир 4 кривошипа 5, неподвижный шарнир 6 коромысла 7, неподвижный шарнир 8 коромысла 9. Шатун 10 первого лямбдаобразного механизма (левого на фиг. 3) крепится к двум шарнирам: подвижному шарниру 11 кривошипа 3 и подвижному шарниру 12 коромысла 7. Шатун 13 второго лямбдаобразного механизма (правого на фиг. 3) крепится к двум шарнирам: подвижному шарниру 14 кривошипа 5 и подвижному шарниру 15 коромысла 9. Рабочая опорная точка первого лямбдаобразного механизма - это шарнир 16. Рабочая опорная точка второго лямбдаобразного механизма - это шарнир 17. Такая механическая система имеет две степени свободы: угол поворота кривошипа 3 первого механизма и независимый от него угол поворота кривошипа 5 второго механизма. При независимых друг от друга вращениях кривошипов 3 и 5 соответственные шарнирные рабочие точки 16 и 17 описывают независимые друг от друга шагающие траектории. К этим точкам в прототипе шарнирно крепятся вертикальные силовые опоры.
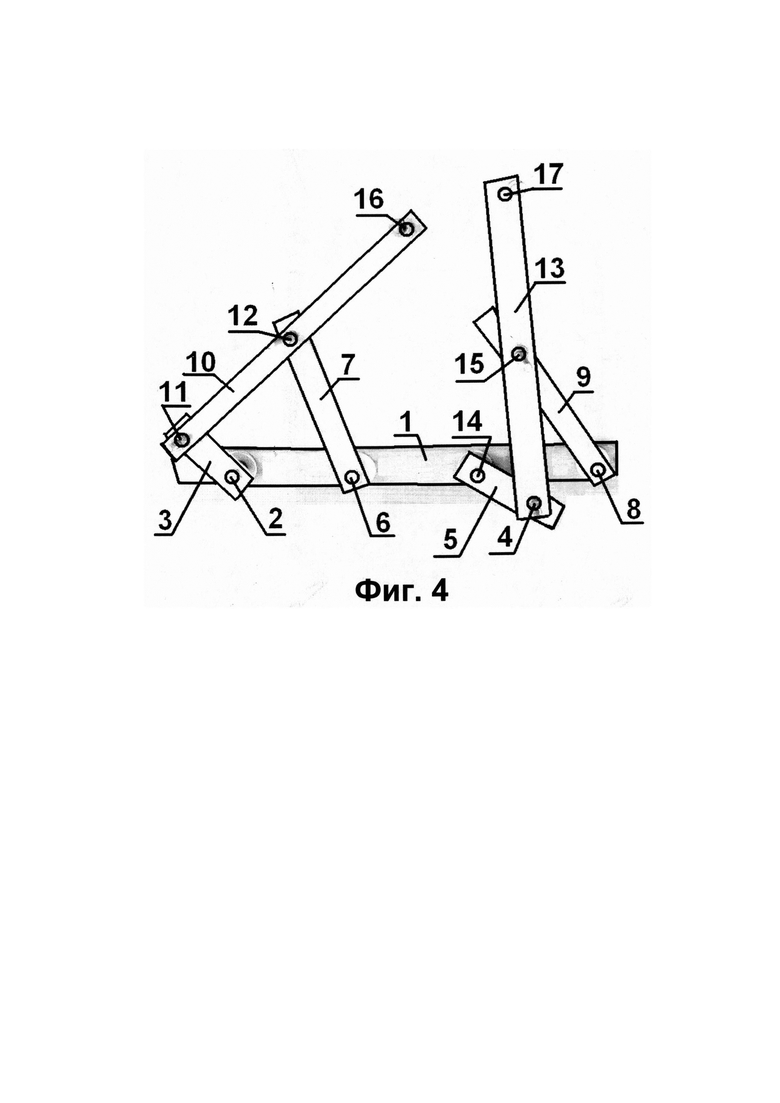
Фиг. 4 показывает пример независимой работы двух лямбдаобразных механизмов П.Л. Чебышева, левого и правого при независимых друг от друга углах поворота кривошипов 3 и 5.
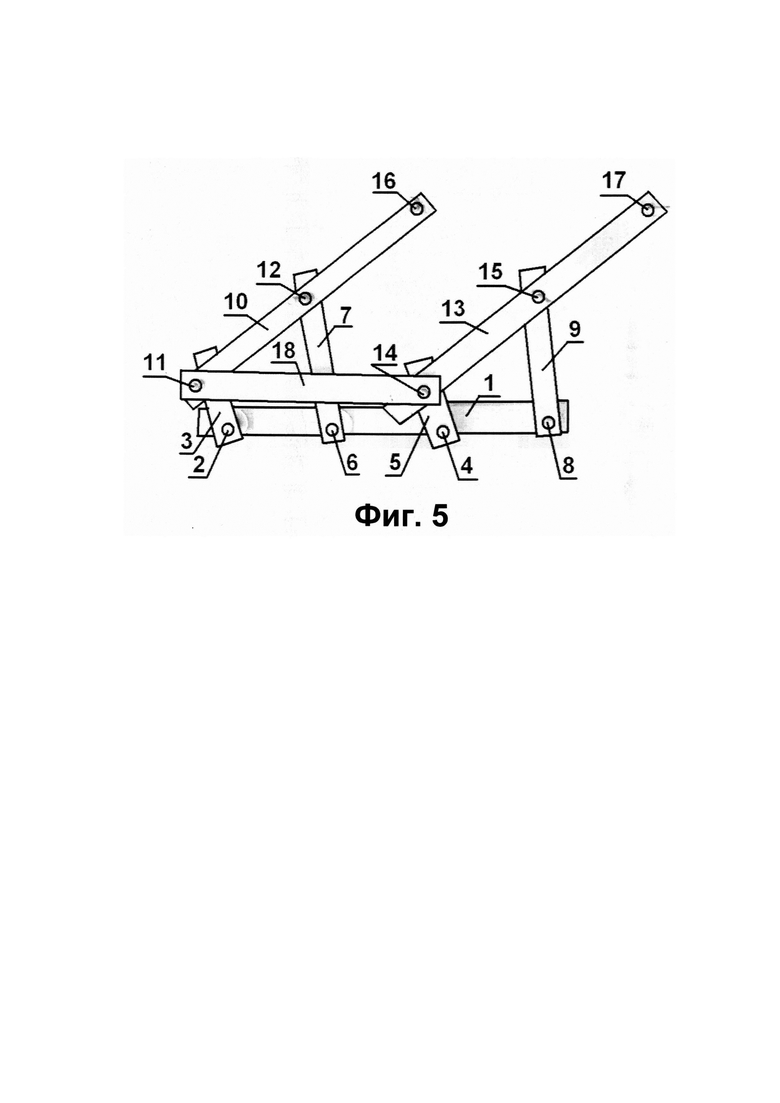
Синхронизация работы пары лямбдаобразных механизмов П.Л. Чебышева выполняется в несколько приемов. Фиг. 5 показывает первое устройство для синхронизации - кривошипный синхрошатун 18, напоминающий введенный П.Л. Чебышевым в выбранном прототипе, который шарнирно крепится одним своим шарниром 11 к шарниру 11 шатуна 10 первого лямбдаобразного механизма (левого на фиг. 5), а другим своим шарниром 14 к шарниру 14 шатуна 13 второго лямбдаобразного механизма (правого на фиг. 5). По сравнению с прототипом - это новый элемент, обладающий существенным отличительным признаком, потому что в устройстве «Стопоходящая машина», схема которого показана на фиг. 2, П.Л. Чебышев таким же шатуном синхронизировал работу пары лямбдаобразных механизмов 02 и 04 с одной стороны и 01 и 03 с другой стороны, но в каждой паре лямбдаобразные механизмы были развернуты на 180 градусов по отношению друг к другу, то есть работали в противофазе, хотя синхрошатун обеспечивал синфазное вращение кривошипов. Первый существенный отличительный признак предлагаемого технического решения от прототипа заключается в одинаковой ориентации обоих лямбдаобразных механизмов относительно корпуса. На всех рисунках, в том числе и на фиг. 5, механизмы предлагаемого нового технического решения повернуты в одну сторону, а не в разные стороны, как в прототипе у П.Л. Чебышева. При такой одинаковой ориентации лямбдаобразных механизмов оба устройства всегда работают в одной фазе, то есть синфазно двигаются все три пары соответственных рычагов: пара кривошипов 3 и 5, пара коромысел 7 и 9, пара шатунов 10 и 13. Очень важно, что рабочие опорные точки обоих лямбдаобразных механизмов 16 и 17 тоже двигаются в одинаковой фазе, то есть синфазно, осуществляя плоскопараллельное поступательное движение отрезка 16-17, который может быть технически реализован в виде рычага, без вращения этого отрезка относительно корпуса и земли, тогда как в прототипе рабочие опорные точки двигаются в противофазе, на них в принципе невозможно установить рычаг-отрезок 16-17.
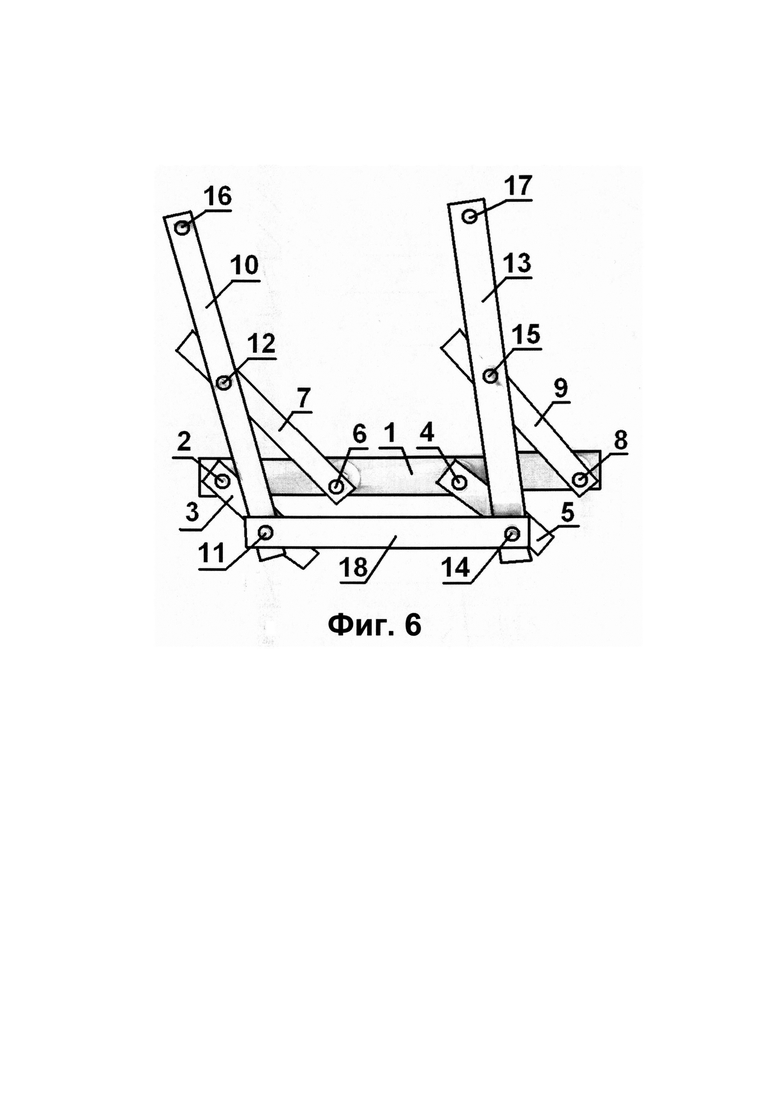
Для иллюстрации плоскопараллельного движения отрезка 16-17 на фиг. 6 показано другое расположение рычагов двух механизмов, работа которых синхронизирована синхрошатуном 18. По сравнению с фиг. 5 кривошипы 3 и 5 одновременно повернулись на угол приблизительно 135 градусов по часовой стрелке. При этом отрезок 16-17 и две его не соединенные пока точки 16 и 17 переместились из правой части схемы на фиг. 5 в левую часть рисунка на фиг. 6.
Дальнейшее создание нового механизма относится к области знаний типа ноу-хау (знаю как - от английского know how), но теперь уже требует правовой, то есть патентной, защиты результатов интеллектуальной деятельности. Казалось бы, механизм, изображенный на фиг. 5 и фиг. 6, должен устойчиво работать, как утверждают законы и правила теоретической механики. Но на практике дело обстоит совершенно иначе. Дело в том, что нельзя создать рычаги с абсолютно точными размерами и конфигурациями: существуют люфтовые зазоры в шарнирных соединениях, есть ошибки в расстояниях между шарнирами на корпусе и рычагах, есть отклонения от прямолинейности в отрезках, есть отклонения от компланарности плоскости корпуса механизма - все это технологические ошибки, которые никогда нельзя сделать нулевыми. Технологические ошибки, даже небольшие, например, 0,1 мм, как, при изготовлении демонстрационного макета механизма, могут привести к качественному изменению работы устройства. Более того, из-за технологических ошибок механизм просто не будет работать.
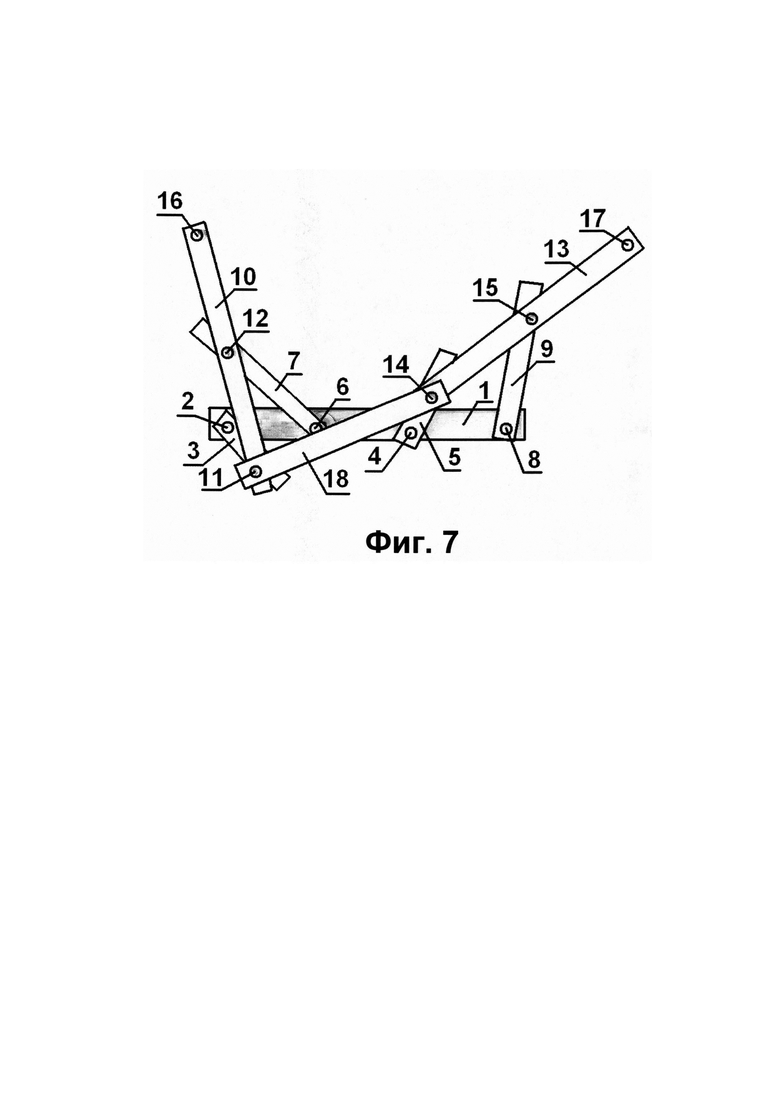
На фиг. 7 показано положение рычагов двух лямбдаобразных механизмов, синхронизированных кривошипным синхрошатуном 18. По теории и по правилам теоретической механики и геометрии кривошип 3 левого механизма всегда должен быть параллелен кривошипу 5 правого механизма, коромысло 7 левого механизма всегда должно располагаться параллельно коромыслу 9 правого механизма, шатун 10 левого механизма всегда должен быть параллелен шатуну 13 правого механизма. Однако на фиг. 7 видно, что пары соответственных одноименных рычагов двух синхронизированных новым кривошипным шатуном 18 одинаково ориентированных лямбдаобразных механизмов не параллельны. Причина такого расхождения заключается в технологических ошибках, которые никогда нельзя устранить даже самыми точными методами производства.
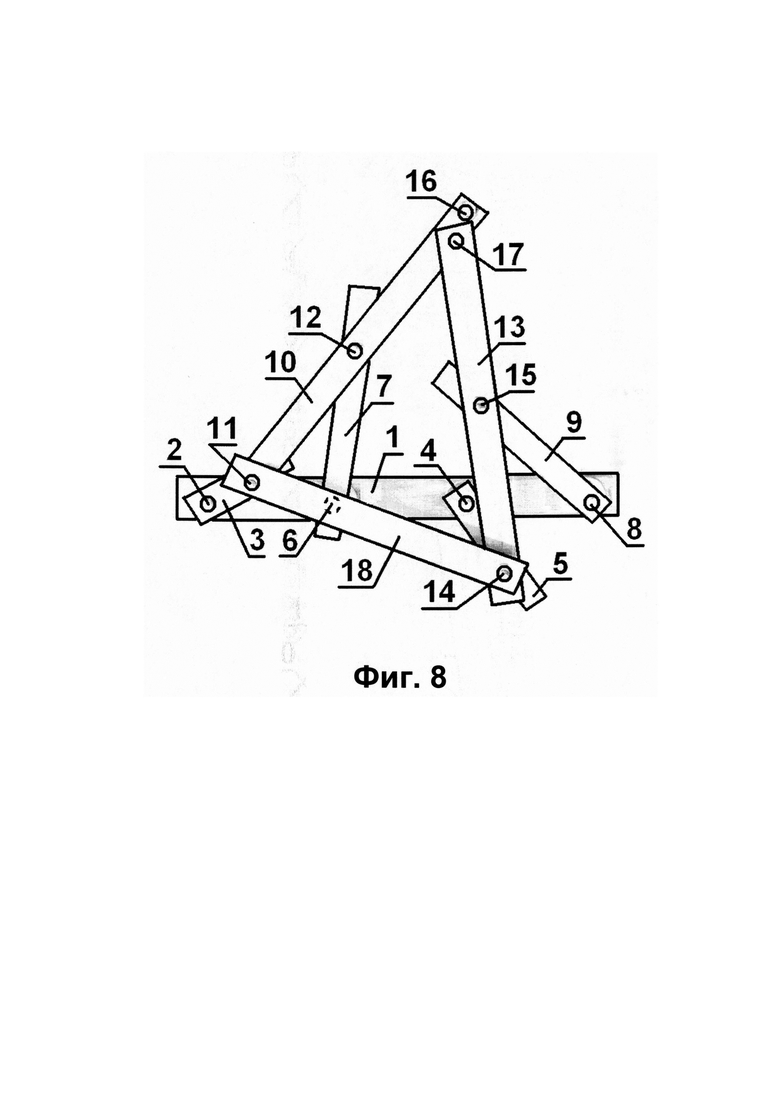
Фиг. 8 иллюстрирует, насколько критичными могут оказаться технологические ошибки, качественно изменяющие движение даже синхронизированной новым кривошипным сихрошатуном 18 пары одинаково ориентированных лямбдаобразных механизмов П.Л. Чебышева. Если на фиг. 7 показана конфигурация рычагов с грубейшим нарушением правила плоскопараллельного поступательного движения отрезка 16-17, причем с деформацией растяжения отрезка 16-17, то на фиг. 8 приведен пример столкновения рабочих точек 16 и 17 шатунов 10 и 13. Такое столкновение приводит к заклиниванию механизма, при котором дальнейшее движение рычагов невозможно. Но какова бы ни была конфигурация механизма с нарушением параллельности соответственных одноименных пар рычагов в двух одинаково ориентированных лямбдаобразных механизмах П.Л. Чебышева, вывод всегда один: механизм работать не может, даже при установке единичного нового кривошипного шатуна 18.
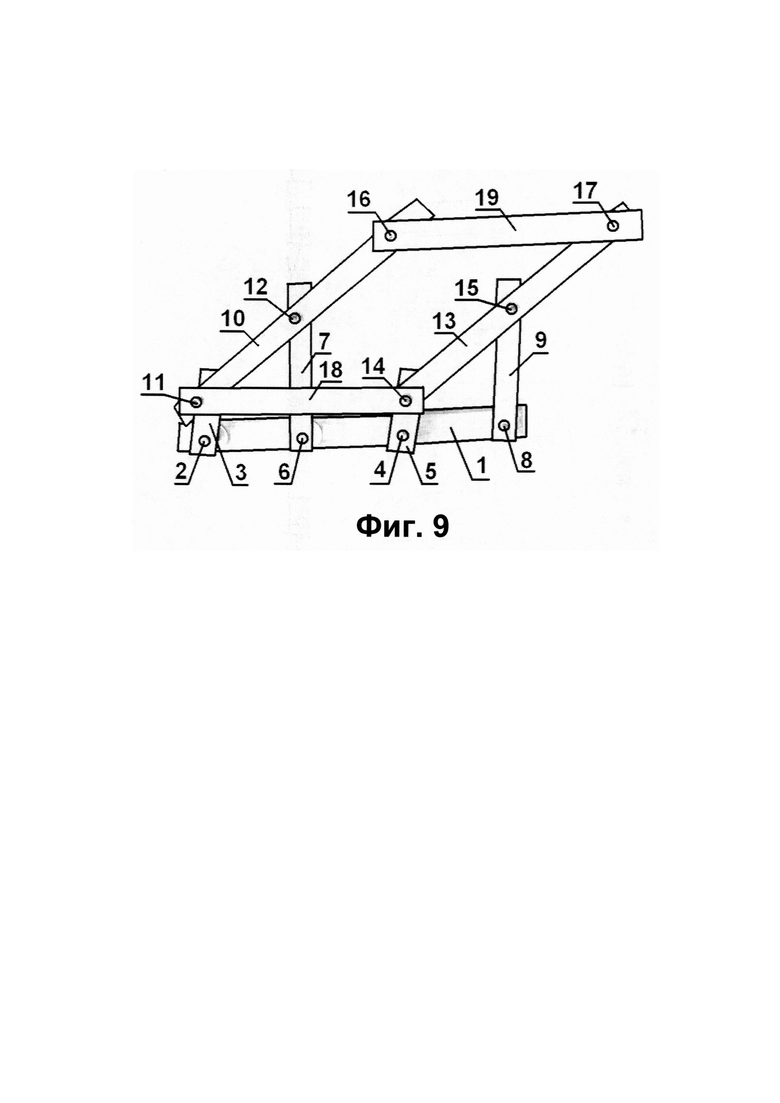
Новое техническое решение иллюстрируется схемой на фиг. 9 Существенным отличительным признаком от прототипа предлагаемого технического решения является введение в конструкцию механизма нового элемента - пассивного силового опорного синхрошатуна 19, который устанавливается шарнирно одним разъемом 16 на шарнир 16 шатуна 10 первого лямбдаобразного механизма (левого на фиг. 9), вторым разъемом 17 также шарнирно соединяется с шарниром 17 второго лямбдаобразного механизма (правого на фиг. 9). Это второй синхрошатун в паре лямбдаобразных механизмов, который является рабочим и, как будет показано далее, силовым опорным шатуном. Но пока обосновывается только существенное отличие и новизна предлагаемого силового опорного шатуна 19, а обсуждение опорных, силовых, несущих, прочностных свойств будет выполнено далее.
В прототипе, то есть в «Стопоходящей машине» П.Л. Чебышева, есть похожая деталь, но совершенно другого назначения.
Во-первых, на фиг. 2 диагональный синхронизатор опор 02 и 03 жестко связывает силовые вертикальные опоры 02 и 03, что показано на фиг. 2 темными закрашенными треугольниками, обозначающими неразъемные соединения деталей. Значит, в прототипе диагональный синхронизатор опор 02 и 03 не является шатуном, потому что противоречит определению шатуна: шатун - это рычаг с двумя подвижными шарнирами, который может совершать плоскопараллельное поступательно-вращательное движение. Диагональный синхронизатор опор 02 и 03 не имеет шарниров, а имеет жесткие неразъемные соединения на концах. Значит, вертикальные силовые опоры 02 и 03 и диагональный синхронизатор опор 02 и 03 представляют собой только одно кинематическое звено в виде П-образного рычага. В предлагаемом техническом решении новый силовой опорный синхрошатун 19 разъемно, с помощью шарниров 16 и 17 крепится к шатунам 10 и 13 двух одинаково ориентированных лямбдаобразных механизмов.
Во-вторых, в прототипе выполнено диагональное размещение соединительного диагонального синхронизатора опор 02 и 03. Если на фиг. 1 предположить, что «Стопоходящая машина» П.Л. Чебышева двигается вправо, то жесткий, неразъемный диагональный синхронизатор опор 02 и 03 неразъемно соединяет силовую вертикальную переднюю левую опору 03 и силовую вертикальную заднюю правую опору 02, то есть не лежит в одной плоскости с вертикальными силовыми опорами 02 и 03, не является компланарным элементом. В предлагаемом новом техническом решении новый силовой опорный синхрошатун 19 является компланарным рычагом, то есть располагается в плоскости корпуса механизма или в параллельной корпусу механизма плоскости, а также в плоскости, параллельной силовым опорам, которые, как будет показано далее, будут заменены одной новой силовой опорой в виде пластины.
Все сказанное о вертикальных силовых опорах 02 и 03 прототипа (фиг. 2) справедливо для другой пары силовых вертикальных опор 01 и 04 прототипа, то есть передней правой и задней левой. Если предполагать, что «Стопоходящая машина» П.Л. Чебышева двигается вправо на фиг. 2. Но силовой опорный синхрошатун для них будет уже другой, он не показан на чертежах, потому что это другая пара лямбдаобразных механизмов.
Первой новизной и первым существенным отличием нового элемента в виде силового опорного синхрошатуна 19 является компенсация технологических ошибок при изготовлении деталей механизма. Действительно, образовавшийся параллелограмм (фиг. 9) 11-16-17-14 способен трансформироваться без изменения длин сторон и нарушения параллельности противоположных сторон 11-16, 14-17 и 11-14, 16-17. При этом длина параллельных сторон 11-16 и 14-17 равна рабочей, от шарнира до шарнира, длине шатунов 10 и 13 двух одинаковых и одинаково ориентированных лямбдаобразных механизмов П.Л. Чебышева. Длина силового опорного синхрошатуна 19 может быть произвольной, но равной длине сихрошатуна 18, определяемой техническим заданием Заказчика к размерам и опорам шагающей машины, причем никак не связанной с размерами лямбдаобразных механизмов. Должно выполняться только одно требование - два одинаково ориентированных лямбдаобразных механизма должны быть разнесены так, чтобы рычаги во время движения не мешали друг другу. При этом лямдаобразные механизмы могут располагаться не обязательно в одной плоскости, а находиться в двух параллельных плоскостях, что не противоречит правилу компланарности механизма.
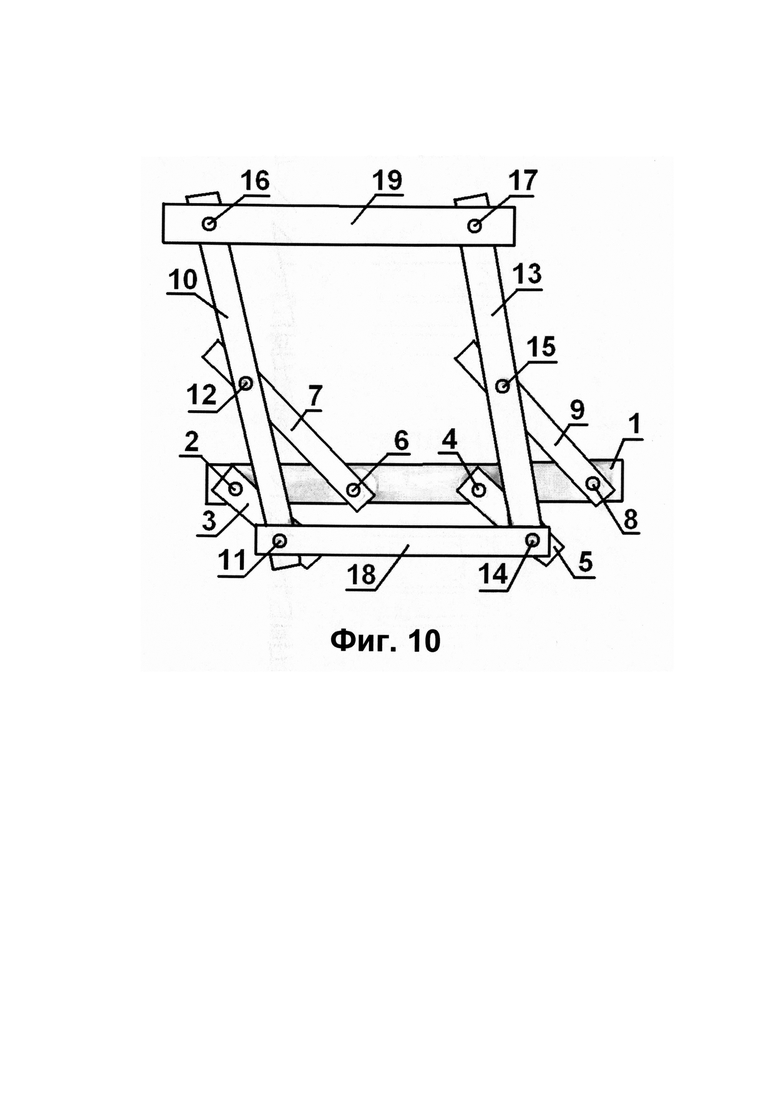
Работоспособность нового механизма и правильность предлагаемого технического решения подтверждены испытанием демонстрационной модели механизма. Если на фиг. 9 показана конфигурация механизма и расположение рычагов при крайнем правом положении силового опорного синхрошатуна 19, то на фиг. 10 изображено крайнее левое положение силового опорного синхрошатуна 19. Если предположить, что шагающая машина движется вправо, то на фиг. 9 показан момент времени опускания силовой опоры на землю, а на фиг. 10 изображен момент времени перед началом поднятия силовой опоры с земли. Справа налево силовой опорный синхрошатун 19 двигается почти прямолинейно, обычно говорят, что прямолинейно. Если говорить точно, то прямолинейное движение в трехзвенном шарнирно-рычажном механизме не может быть реализовано в принципе. Это доказано Академиком Иваном Ивановичем Артоболевским. Для реализации точного движения точки по прямолинейному отрезку шарнирно-рычажный механизм должен иметь не менее семи звеньев, не считая корпуса, как, например, прямило Липкина-Посселье. Но в трехзвенном, не считая корпуса, лямбдаобразном механизме П.Л. Чебышева отклонения рабочего участка от прямой линии настолько малы, что ими часто пренебрегают, в том числе при проектировании шагающих машин.
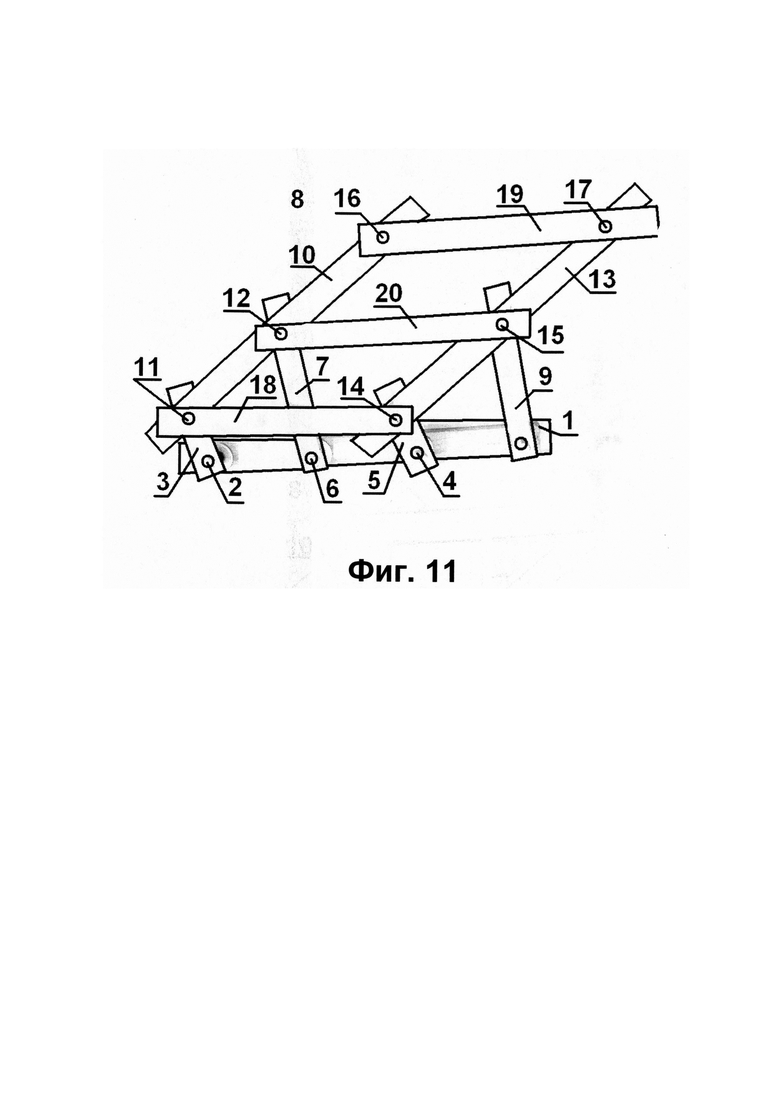
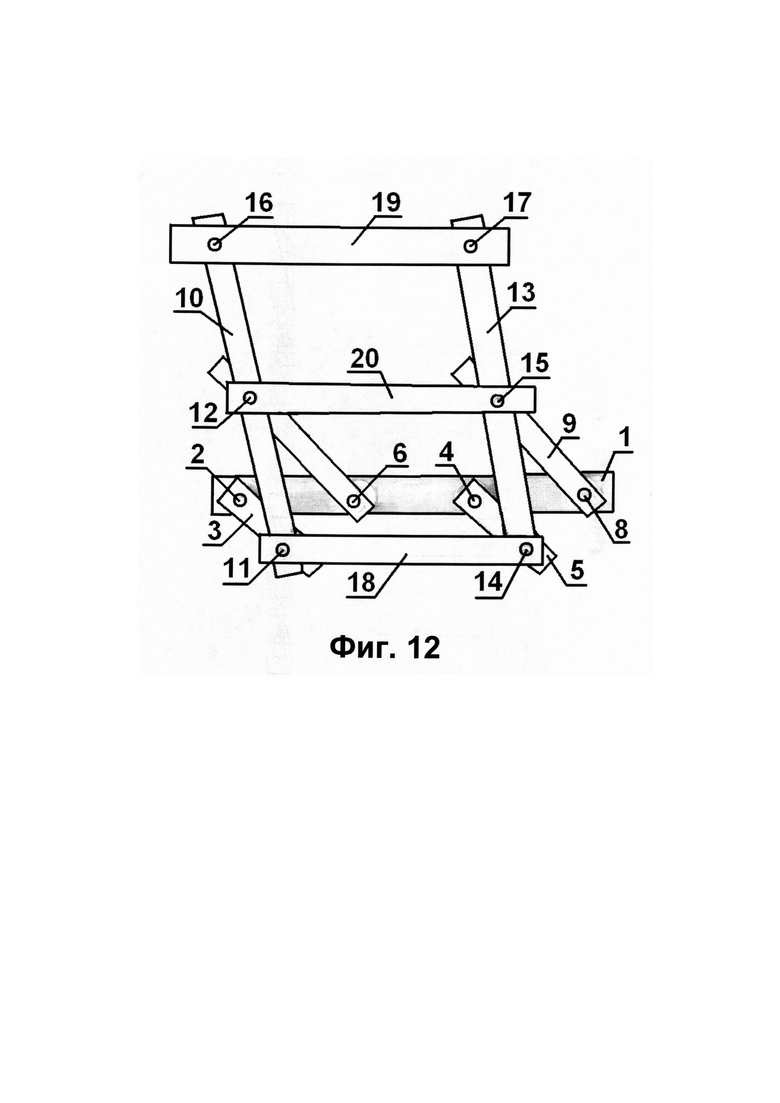
После перемещения силового опорного синхрошатуна 19 справа налево практически по прямолинейному отрезку эта деталь будет двигаться по дуговому пассивному участку переноса силовой опоры с заднего положения в переднее, сохраняя горизонтальную ориентацию, как человек переносит ногу во время шага. Для примера, на фиг. 11 показана конфигурация механизма и положение рычагов перед постановкой силовой опоры на землю в передней точке шагающей траектории, изображенной на фиг. 9. Силовой опорный синхрошатун 19 всегда остается параллельным земле, во всех конфигурациях, соответствующих полному обороту кривошипов 3 и 5 вокруг своих осей 2 и 4 соответственно. Однако особенностью и существенным отличительным признаком нового технического решения является то, что в конструкцию предлагаемого механизма можно добавлять сколько угодно пассивных синхрошатунов, из которых только пассивный синхрошатун 19 является силовым опорным. Например, на фиг. 11 в механизм добавлен пассивный синхрошатун 20, установленный на шарниры 12 и 15, параллельный шатунам 18 и 19. Пассивный кинематический элемент не изменяет движение рычагов механизма. На практике пассивные элементы применяют в других целях: увеличение прочности, усиление конструкции, а также, как в предлагаемом техническом решении, для компенсации действия технологических ошибок. Фиг. 11 показывает конфигурацию шагающего механизма перед опусканием силовой опоры на землю. На фиг. 12 изображена конфигурация шагающего механизма и положение рычагов, соответствующее почти задней точке шагающей траектории, как и на фиг. 10, но с еще одним пассивным синхрошатуном 20, установленным на шарниры 12 и 15.
Иллюстрации на фиг. 11 и фиг. 12 обосновывают существенный отличительный признак силового опорного синхрошатуна 19 по сравнению с прототипом по пяти причинам.
Во-первых, силовой опорный синхрошатун 19 заменил собой жесткую связь в виде неразъемного элемента соединения двух вертикальных силовых опор на подвижный рычаг - собственно на сам силовой опорный синхрошатун 19 с двумя шарнирными креплениями 16 и 17 с возможностью поворота рычагов 10, 13, 19 друг относительно друга.
Во-вторых, не каждый синхрошатун, установленный посредством двух шарниров на шатуны 10 и 13 параллельно кривошипному синхрошатуну 18, может служить силовым опорным шатуном как шатун 19. Только силовой опорный синхрошатун 19 движется в плоскости корпуса шагающего механизма по шагающей траектории, то есть каждая точка отрезка 16-17 совершает одинаковое, синхронное, плоскопараллельное, шагающее движение, сам отрезок 6-17 всегда остается горизонтальным, как и силовой опорный синхрошатун 19. Следовательно, в предлагаемом техническом решении по шагающей траектории двигается не точка, как в прототипе, а горизонтальный отрезок.
В-третьих, только силовой опорный синхрошатун 19 можно продолжить опорной пластиной ниже корпуса шагающего механизма до рабочего опорного отрезка на внешнюю опорную поверхность, например, как чаще всего, на поверхность земли. Силовой опорный синхрошатун 19 конструктивно можно продолжать в любом направлении. Можно к силовому опорному синхрошатуну 19 жестко прикрепить опорную пластину, которую затем продолжить ниже корпуса шагающего механизма. Единая конструкция силового опорного шатуна 19 или жесткое соединение с ним опорной пластины с позиции кинематики равноправны, потому что представляют одно кинематическое звено - шатун 19, но в различной формы.
В-четвертых, опорную пластину, то есть силовой опорный синхрошатун 19 можно сделать любой формы как единое кинематическое звено механизма, поэтому внизу опорную пластину можно выполнить в виде опорного отрезка, как правило, прямолинейного, хотя возможны другие формы. Опорный отрезок внизу опорной пластины совершает шагающее движение. Таким образом, по шагающей траектории двигается не опорная рабочая точка вверху механизма или низ вертикальной силовой опоры, как в прототипе, а весь отрезок, уменьшая нагрузку на опорную поверхность, что важно для слабых грунтов, например, для заболоченных почв.
В-пятых, ни на какой другой синхрошатун, параллельный кривошипному синхрошатуну 18, кроме единственного силового опорного синхрошатуна 19, нельзя установить опорную пластину для смещения шагающей траектории ниже корпуса шагающего механизма или машины, потому что такая пластина не будет двигаться по шагающей траектории. Например, пластина установленная на кривошипный синхрошатун 18, будет двигаться плоскопараллельно по окружности, как концевые точки 11 и 14 синхронизированных кривошипов 3 и 5. Окружность - это не шагающая траектория. Точно также, например, пластина, установленная на синхрошатун 20, будет двигаться плоскопараллельно по плоской замкнутой кривой линии, которая называется шатунной линией, но эта шатунная линия не будет шагающей траекторией. В этом отношении силовой опорный синхрошатун 19 - новый, единственный и уникальный элемент в предлагаемом новом техническом решении.
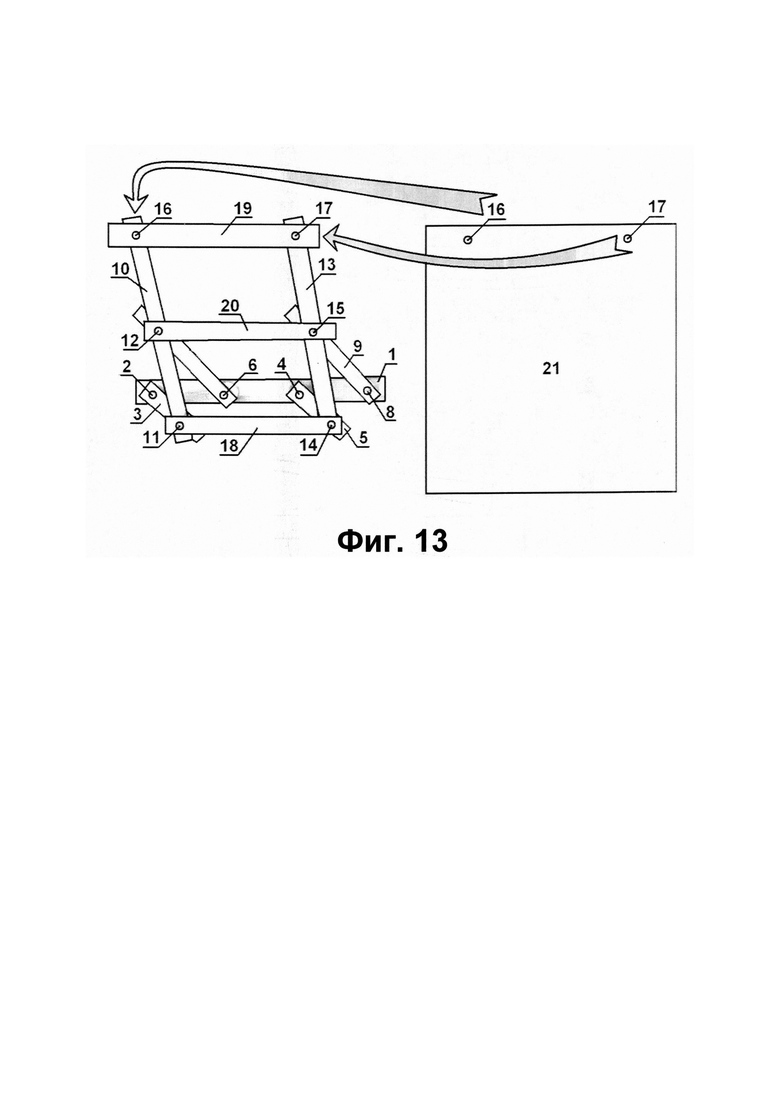
На фиг. 13 показано, как устанавливается опорная пластина 21 на шарниры 16 и 17 соответствующими разъемами, которые являются частью шарнирных соединений 16 и 17. Опорная пластина показана в правой части фиг. 13 в виде прямоугольника с отверстиями для шарниров 16 и 17. Вертикальный размер прямоугольника больше вертикального размера корпуса шагающего механизма. Опорный отрезок внизу опорной пластины находится ниже корпуса шагающего механизма или шагающей машины. Вверху опорной пластины предусмотрены два узла крепления, например, отверстия или подшипники, к шарнирам 16 и 17, например, к втулкам. В примере на фиг. 13 прямоугольная опорная пластина отверстиями надевается на втулки шарниров 16 и 17. После установки опорной пластины на шарниры 16 и 17, многие рычаги будут заслонены опорной пластиной, поэтому не будут обозначаться на фиг. 14, фиг. 15, фиг. 16. Существенным отличием предлагаемого технического решения является опорный отрезок внизу опорной пластины, который двигается по шагающей траектории - весь отрезок, а не единичная силовая опорная точка, как в прототипе.
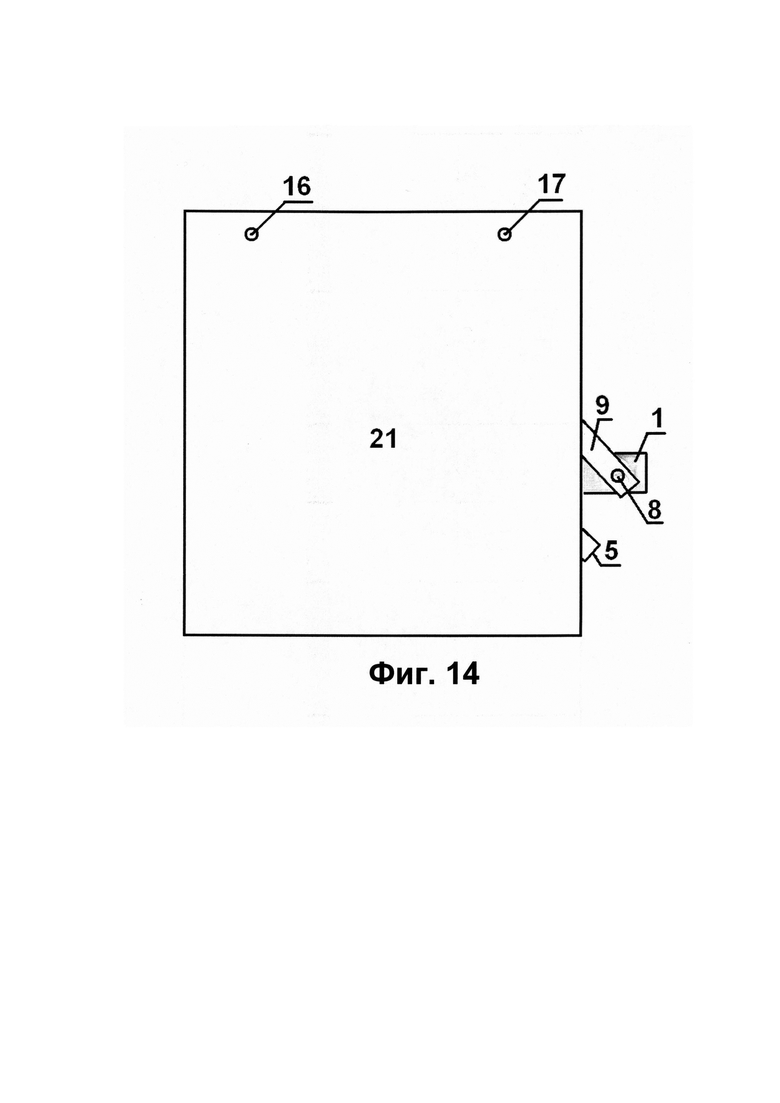
На фиг. 14 показано заднее положение опорной пластины, то есть силового опорного синхрошатуна 19, выполненного в виде пластины 21, потому что с кинематической точки зрения это одно и то же кинематическое звено, один и тот же элемент-рычаг в кинематической схеме предлагаемого механизма. Предполагается, что шагающее движение происходит вправо на фиг. 14. Заднее положение опорной пластины соответствует моменту времени окончания прямолинейного участка опорного шагающего движения и началу подъема опорной пластины на дуговой пассивный участок переноса опоры.
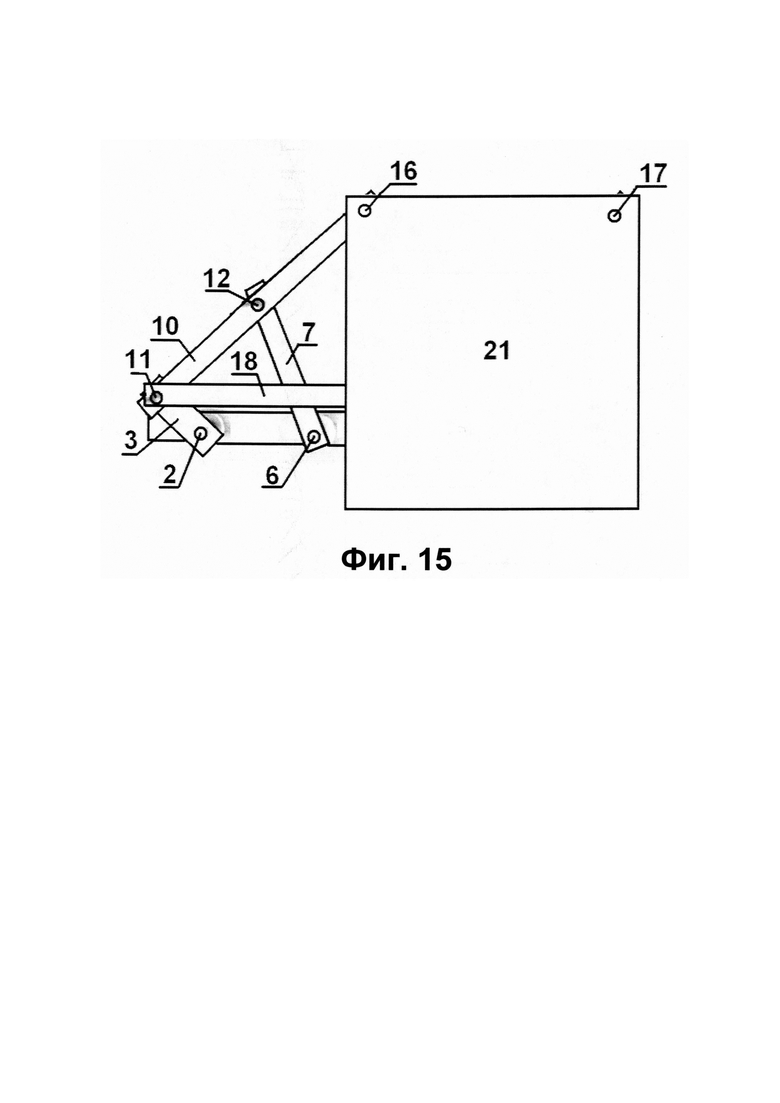
На фиг. 15 показано положение опорной пластины 21 на дуговом пассивном участке переноса опоры, когда опорная пластина приподнята над землей, при этом шагающая машина опирается на другую опору другого шагающего механизма, как человек поочередно опирается на правую или левую ногу, когда шагает.
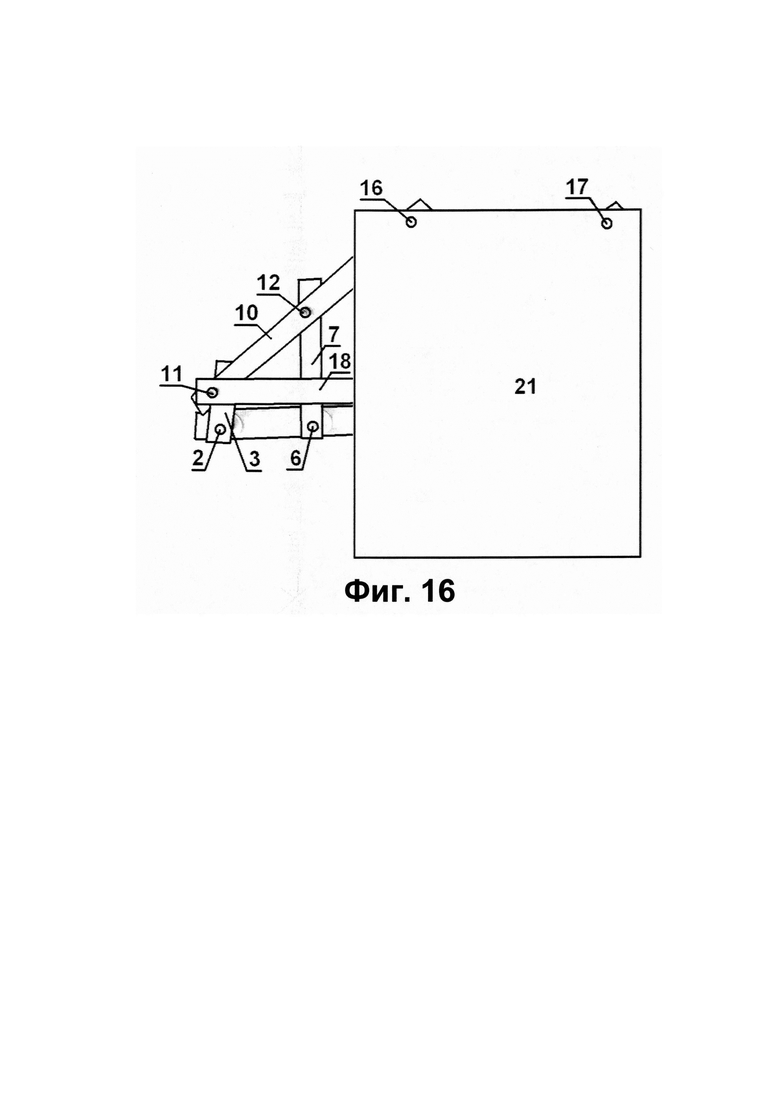
На фиг. 16 показан момент времени опускания опорной пластины 21 на землю. Это окончание пассивного дугового участка переноса опоры и начало активного опорного прямолинейного участка шагающей траектории.
Таким образом, существенными отличительными признаками предлагаемого нового устройства являются: одинаковая ориентация двух лямбдаобразных механизмов, каждый из которых формирует собственную шагающую траекторию рабочей силовой опорной точки в верхней части механизма, добавление силового опорного синхрошатуна, который шарнирно закреплен на двух рабочих опорных точках в верхней части механизма и продолжается опорной пластиной ниже корпуса шагающего механизма до рабочего опорного отрезка на внешнюю опорную поверхность.
Технический эффект и практический результат заключается в получении надежного рабочего опорного отрезка, все точки которого двигаются по шагающей траектории, но всегда располагаются ниже корпуса шагающего механизма или шагающей машины.
Изобретение относится к области шагающих машин и механизмов, обеспечивающих движение шагоходов. Шагающий механизм содержит корпус, два определенно ориентированных механизма, вертикальные силовые опоры, два шарнира крепления двух вертикальных силовых опор к двум рабочим опорным точкам в верхней части механизма и соединительный кривошипный синхрошатун. При этом два повернутых друг к другу механизма для формирования двух траекторий шага двух рабочих опорных точек в верхней части механизма выполнены с возможностью ориентироваться в одинаковом направлении. Добавлен силовой опорный синхрошатун, который шарнирно закреплен на двух рабочих опорных точках в верхней части механизма и продолжается опорной пластиной ниже корпуса шагающего механизма до рабочего опорного отрезка на внешнюю опорную поверхность. Достигается обеспечение устойчивости механизма. 16 ил.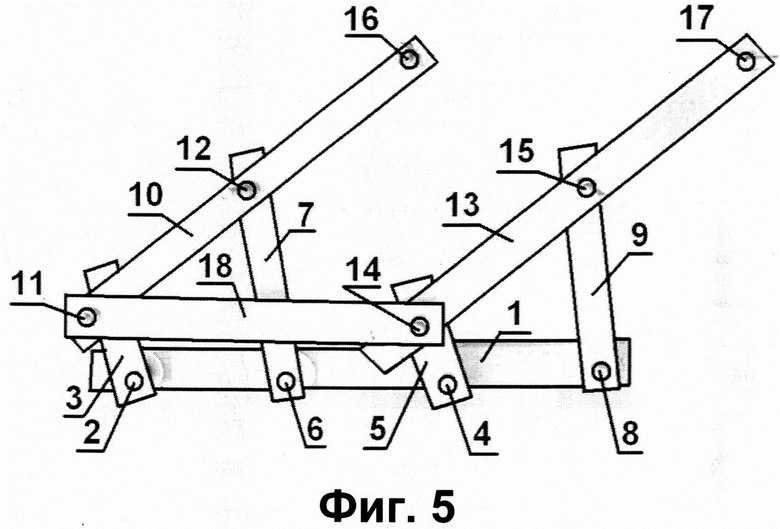
Шагающий механизм, содержащий корпус, два определенно ориентированных механизма для формирования двух траекторий шага двух рабочих опорных точек в верхней части механизма, вертикальные силовые опоры, два шарнира крепления двух вертикальных силовых опор к двум рабочим опорным точкам в верхней части механизма, соединительный кривошипный синхрошатун, отличающийся тем, что два повернутых друг к другу механизма для формирования двух траекторий шага двух рабочих опорных точек в верхней части механизма выполнены с возможностью ориентироваться в одинаковом направлении, добавлен силовой опорный синхрошатун, который шарнирно закреплен на двух рабочих опорных точках в верхней части механизма и продолжается опорной пластиной ниже корпуса шагающего механизма до рабочего опорного отрезка на внешнюю опорную поверхность.
| МЕХАНИЗМ ШАГАЮЩЕЙ МАШИНЫ | 2017 |
|
RU2712370C2 |
| Ротационная машина объемного вытеснения | 1990 |
|
SU1800104A1 |
| US 4527650 A1, 09.07.1985 | |||
| Прямолинейно-направляющий механизм | 1990 |
|
SU1820099A1 |
| Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот | 2018 |
|
RU2734175C2 |
