Изобретение относится к машиностроению, а именно к кривошипно-рычажным преобразователям вращательного движения в прямолинейно-поступательное и наоборот. Изобретение может найти применение, в частности, в шагающих движителях, в манипуляторах и других устройствах.
Известен прямолинейно-направляющий механизм, на траектории движения выходного элемента которого имеется прямолинейный участок, расположенный на внешней от механизма стороне, содержащий лямбдообразный механизм Чебышева, к шатуну которого шарнирно прикреплен двуплечий рычаг, соединенный одним концом с дополнительной качалкой, а другим - с выходным элементом [1] .
Недостатком указанного механизма является низкая жесткость конструкции ввиду установки двуплечего рычага на шарнирах звеньев, вынесенных от корпуса на расстоянии их длин, т. е. дополнительной качалки и шатуна лямбдообразного механизма.
Цель изобретения - повышение жесткости конструкции механизма.
Это достигается тем, что в прямолинейно-направляющем механизме, содержащем основание, шарнирно соединенный с ним одним концом кривошип и кинематически связанный с другим концом кривошипа двуплечий рычаг, основание механизма снабжено пазом, для взаимодействия с которым на двуплечем рычаге установлен ролик, одно из плеч двуплечего рычага кинематически связано с другим концом кривошипа либо посредством кулисы, при этом механизм снабжен роликом, закрепленным на основании и предназначенным для взаимодействия с пазом кулисы, либо посредством шатуна, при этом механизм снабжен коромыслом, один конец которого шарнирно соединен с основанием, а другой - с шатуном.
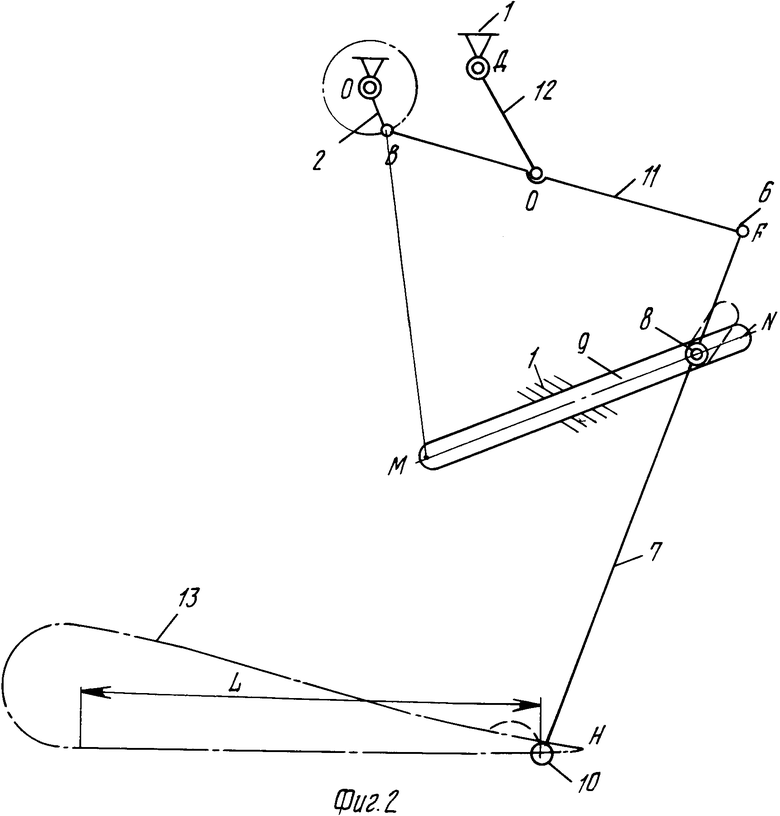
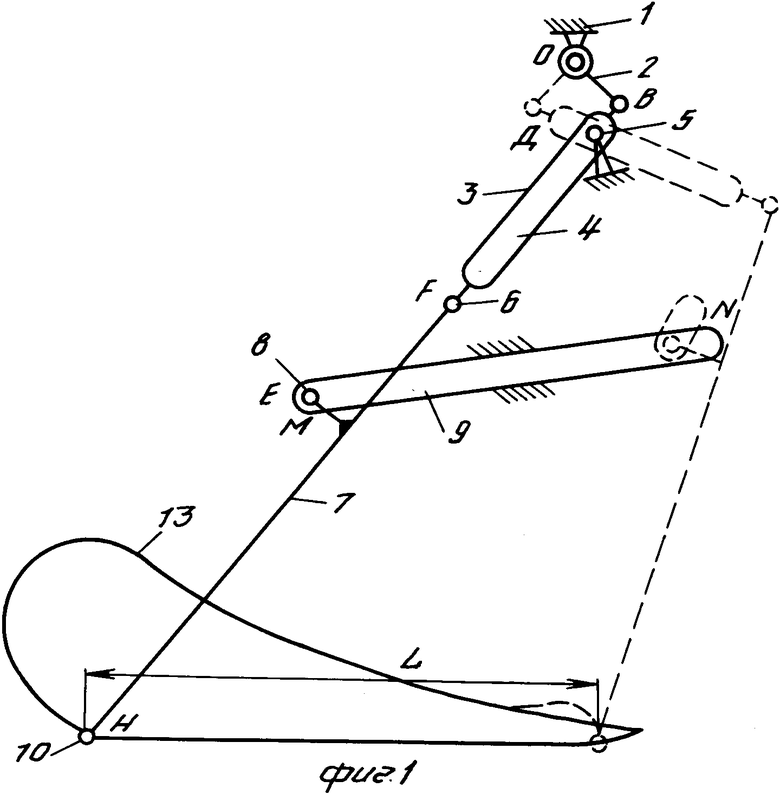
На фиг. 1 изображена кинематическая схема механизма с кинематической связью между одним концом кривошипа и одним из плеч двуплечего рычага, выполненной в виде кулисы; на фиг. 2 - то же, с кинематической связью, выполненной в виде шатуна четырехшарнирного кривошипно-шатунного механизма.
Прямолинейно-направляющий механизм варианта I (фиг. 1) содержит основание 1, с которым шарнирно соединен кривошип 2. Свободный конец кривошипа шарнирно соединен с одним концом кулисы 3, снабженной пазом 4, с которым взаимодействует закрепленный на основании 1 ролик 5. Другой конец кулисы 3 шарниром 6 соединен с одним из плеч двуплечего рычага 7, на котором установлен ролик 8, предназначенный для взаимодействия с пазом 9 основания 1. Свободный конец двуплечего рычага 7 соединен с выходным элементом 10.
В направляющем механизме варианта II (фиг. 2) кривошип 2 является элементом четырехшарнирного кривошипно-шатунного механизма, коромысло 12 которого шарнирно установлено на основании 1, а свободный конец шатуна 11 шарниром 6 соединен с одним из плеч двуплечего рычага 7.
Механизм работает следующим образом.
При вращении кривошипа 2 шарнир 6 кулисы 3 или шатуна 11 описывает замкнутую траекторию, двигая двуплечий рычаг 7 на ролике 8 по пазу 9 основания 1, при котором выходной элемент 10 механизма описывает замкнутую траекторию 13. Причем при выборе оптимального соотношения размеров элементов механизма на траектории 13 движения выходного элемента 10 достигается наличие приближенно-прямолинейного участка L.
Например, при ОВ = 1, возможны следующие соотношения:
для фиг. 1
ОD = 1,41 BF = 5,28 EF = 3,53 EH = 7,1 FH = 10,22
OM = 6,76 DM = 6,31 DN = 2,48 MN = 6,00
для фиг. 2
BC = 3,31 CD = 2,57 OD = 2,34 CF = 4,57 EF = 2,80
EH = 9,20 OM = 8,03 DM = 8,40 DN = 8,00 MN = 7,09
Для обеспечения оптимальной траектории движения конкретного выходного элемента 10 паз 9 основания 1 может быть выполнен отличным от прямой линии. Так при движении ролика 8 по пунктирному участку паза 9 выходной элемент 10 описывает траекторию 13, отличающуюся от основного участка пунктирной линией.
При приложении усилия на выходной элемент 10 по направлении траектории 13 его движения кривошип 2 механизма совершает вращательное движение. (56) Авторское свидетельство СССР N 1519099, кл. В 62 D 57/02, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прямолинейно-направляющий механизм | 1990 |
|
SU1820099A1 |
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| СНЕГОУБОРОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2010082C1 |
| ДОРОЖНО-УБОРОЧНАЯ МАШИНА | 1991 |
|
RU2029819C1 |
| Гидродвигатель | 1989 |
|
SU1707217A1 |
| Снегоуборочное устройство | 1988 |
|
SU1564256A1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| МЕХАНИЗМ | 1992 |
|
RU2054593C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
Изобретение относится к машиностроению, а именно к кривошипно-рычажным преобразователям вращательного движения в прямолинейно-поступательное и наоборот. Цель - повышение жесткости. В основании 1 выполнен паз 9. На двуплечем рычаге 7 установлен ролик 8, взаимодействующий с пазом 9. Двуплечий рычаг 7 кинематически связан с кривошипом 2 посредством кулисы 3 или посредством шатуна. На основании 1 закреплен ролик 5, взаимодействующий с пазом 4 кулисы 3. Один конец коромысла шарнирно соединен с основанием 1, а другой - с шатуном. При вращении кривошипа 2 шарнир 10 двуплечего рычага 7 описывает траекторию 13 с прямолинейным участком. 2 ил.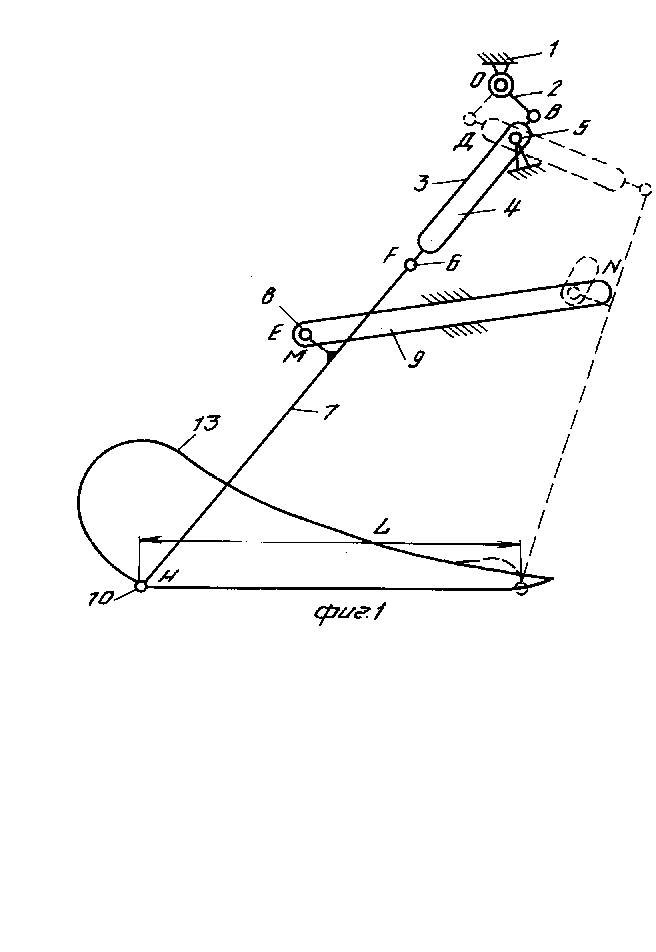
ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ, содержащий основание, шарнирно соединенный с ним одним концом кривошип и кинематически связанный с другим концом кривошипа двуплечий рычаг, отличающийся тем, что, с целью повышения жесткости, в основании выполнен паз, механизм снабжен роликом, установленным на двуплечем рычаге и предназначенным для взаимодействия с пазом основания, одно из плеч двуплечего рычага кинематически связано с другим концом кривошипа либо посредством кулисы, при этом механизм снабжен роликом, закрепленным на основании и предназначенным для взаимодействия с пазом кулисы, либо посредством шатуна, при этом механизм снабжен коромыслом, один конец которого шарнирно соединен с основанием, а другой - с шатуном.
