Изобретение относится к машиностроению, в частности к механизмам для осуществления прямолинейного движения и может быть использовано в шагающих движителях для транспортных средств повышенной проходимости, а также в других отраслях машиностроения.
Известен прямолинейно-направляющий механизм Чебышева из книги И.И. Артоболевского «Механизмы в современной технике», М., Наука, 1979, Т. 1, сх. 621, содержащий основание, шарнирно связанные с ним одними концами кривошип и коромысло, другими концами, коромысло - с вершиной шатуна, выполненного угловым, а кривошип - с одним концом шатуна, где точка соединения выходного звена расположена на другом конце шатуна под углом 260° (100°), образованного прямой, соединяющей вершину угла и шарнир кривошипа, и прямой соединяющей вершину угла и точку соединения выходного звена.
Недостатком указанного механизма является то, что приблизительно-прямолинейный участок на траектории движения точки выходного звена расположен в части траектории, обращенной к механизму стороне. По этой причине, например, в стопоходящем механизме Чебышева, симметричное прямило Чебышева обращено, и в механизме использовано дополнительное звено, на конце которого установлена стопа (см. И.И. Артоболевский, Механизмы в современной технике, М., Наука, 1979, Т. 1, сх. 576).
Целью изобретения является упрощение конструкции механизма, например, для использования его в конструкции шагающего движителя, а также расширение арсенала технических средств четырехшарнирных механизмов, осуществляющих приблизительно-прямолинейное движение и обеспечивающих получение прямолинейных участков на внешней, относительно механизма, стороне траектории движения точки соединения выходного звена.
Указанная цель достигается тем, что механизм, осуществляющий приближенно-прямолинейный участок на траектории движения точки соединения выходного звена и позволяющий осуществить шагающий движитель, содержащий основание, шарнирно соединенный с ним одним концом кривошип, шарнирно связанный с другим концом кривошипа шатун, содержащий точку соединения выходного звена и выполненный угловым, вершина которого кинематически связана с основанием, где точка соединения выходного звена на шатуне расположена в пределах угла ω, образованного прямой, соединяющей вершину угла углового шатуна и шарнир кривошипа, и прямой, соединяющей вершину угла углового шатуна и точку соединения выходного звена, в диапазоне 45°÷100°, а кинематическая связь вершины угла углового шатуна с основанием осуществлена:
- либо посредством шарнирного соединения шатуна с коромыслом, поворотно установленным на основании;
- либо посредством снабжения механизма направляющей, например, выполненной в виде паза в основании, при этом механизм снабжен роликом (пальцем), установленным на вершине угла углового шатуна и предназначенным для взаимодействия с пазом основания;
- либо посредством выполнения направляющей в виде прорези (паза) в пластине (звене), установленной на основании (пластина может быть установлена на основании и не жестко, например, посредством упругой связи), при этом механизм снабжен роликом, установленным на вершине угла углового шатуна и предназначенным для перемещения в прорези пластины.
Указанная цель так же достигается тем, что механизм осуществляющий приближенно-прямолинейное движение на траектории точки соединения выходного звена и позволяющий осуществить шагающий движитель, содержащий, основание, шарнирно соединенный с ним одним концом кривошип, шарнирно связанный с другим концом кривошипа шатун, выполненный угловым, вершина угла которого кинематически связана с основанием, а точка соединения выходного звена на шатуне расположена в пределах угла ω, образованного прямой, соединяющей вершину угла углового шатуна и шарнир кривошипа, и прямой, соединяющей вершину угла углового шатуна и точку соединения выходного звена, в диапазоне 45°÷100°, где в точке соединения выходного звена углового шатуна поворотно установлен опорный башмак, причем шарнир на опорном башмаке расположен возможно близко к плоскости опоры башмака.
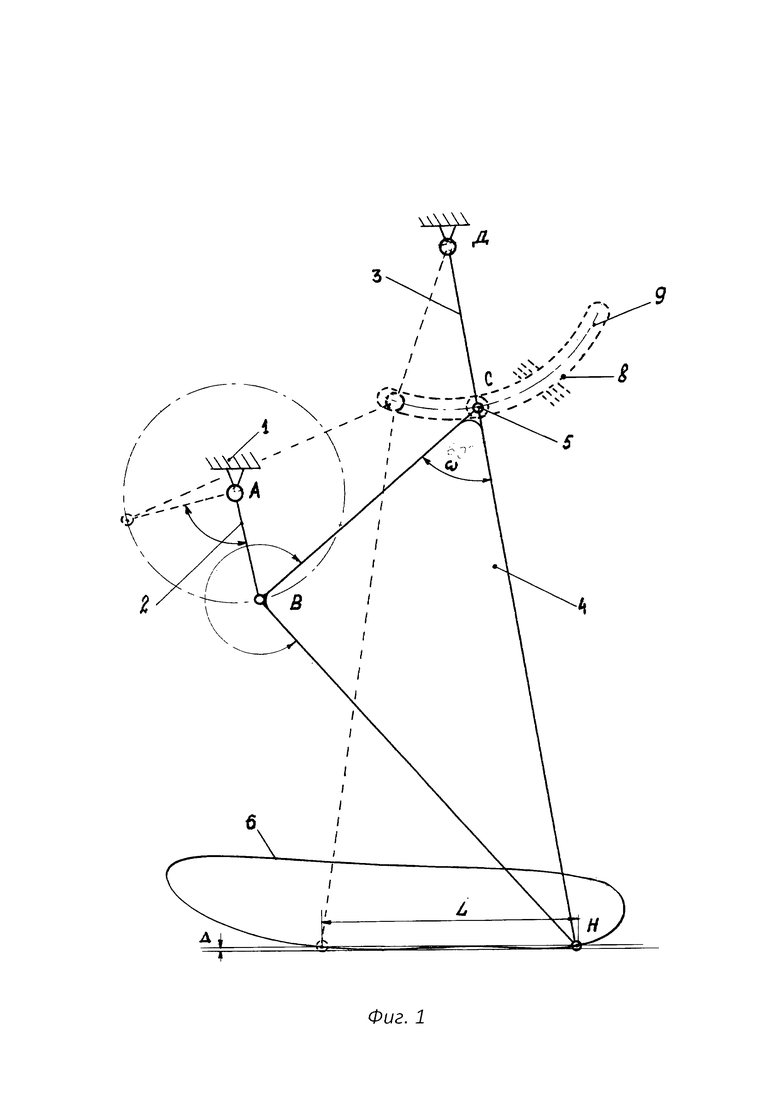
На фиг. 1 изображена кинематическая схема вариантов I и II с траекторией движения точки соединения выходного звена.
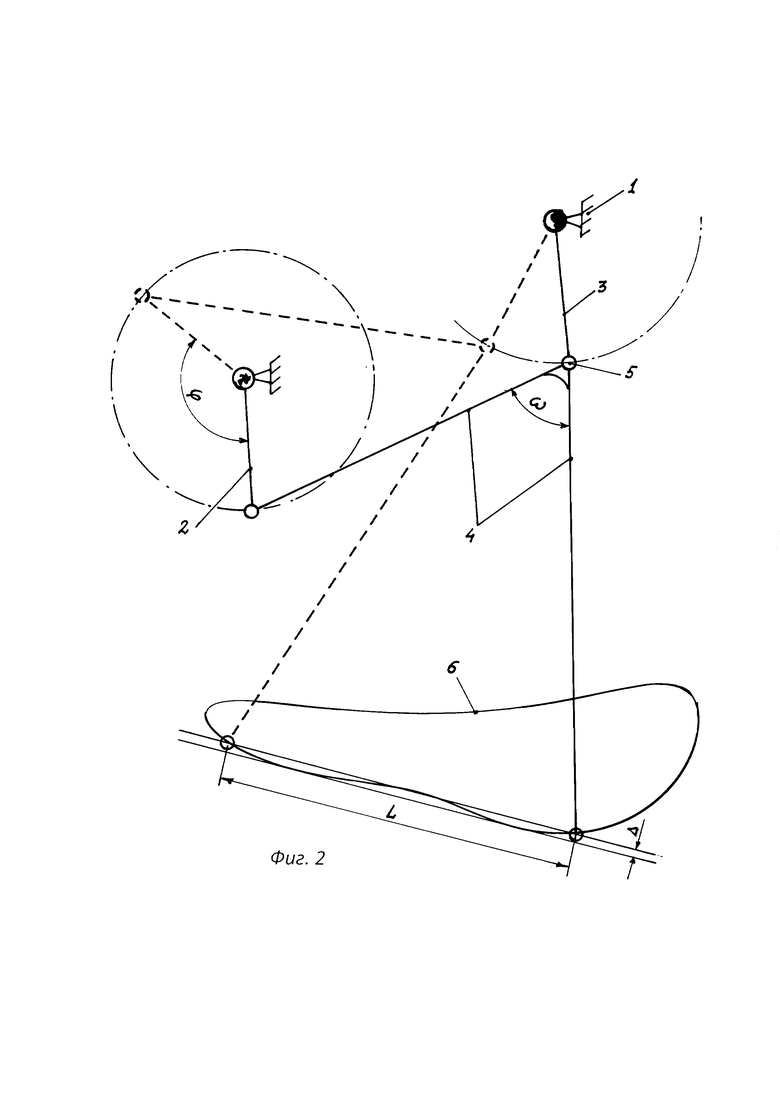
На фиг. 2 - кинематическая схема варианта I.
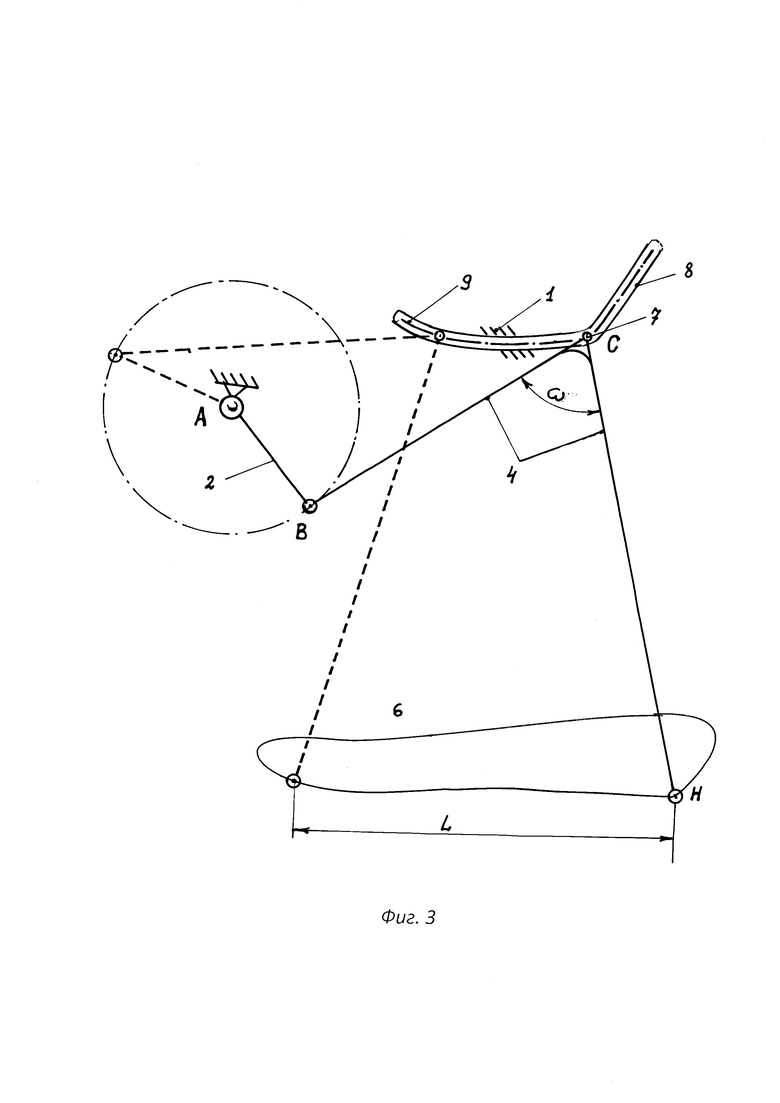
На фиг. 3 - варианта П.
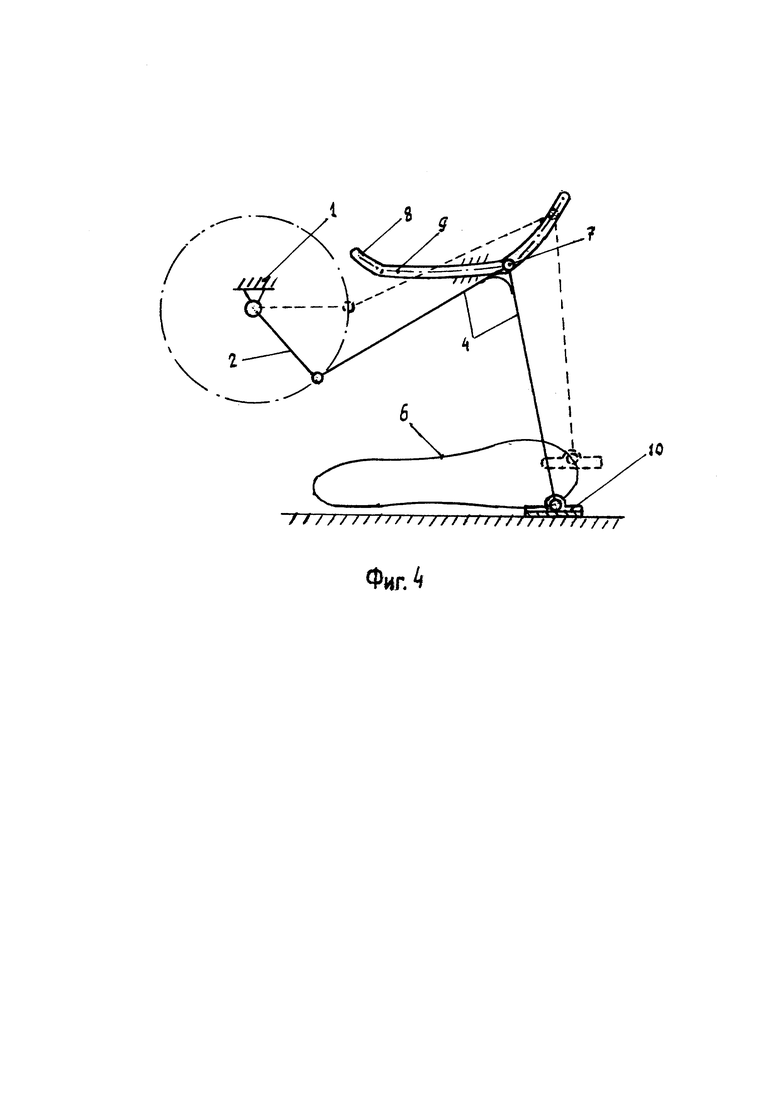
На фиг. 4 изображена кинематическая схема шагающего движителя с возможностью использования приведенных вариантов механизма.
Механизм варианта I (фиг. 1, 2) содержит стойку 1, к которой шарнирно установлены кривошип 2 и коромысло 3, которые другими концами шарнирно соединены с шатуном 4, выполненным угловым, причем с коромыслом - на шарнире 5, расположенным на вершине угла углового шатуна 4, а с кривошипом - свободным концом шатуна. Расстояние между шарнирами звеньев механизма фиг. 2 для ω=66° выражены следующими соотношениями их длин относительно кривошипа, принятого за единицу:


Работа механизма варианта I объясняется следующим образом.
При повороте кривошипа 2 механизма с выбранными соотношениями длин звеньев и угла ω, точка Н шатуна 4 описывает траекторию 6, на которой имеется приблизительно-прямолинейный участок L, который определяется посредством проведения параллельных прямых в зоне приблизительно-прямолинейного участка через вершины амплитуд траектории, где траектория движения точки соединения выходного звена (точка Н) отклоняется от параллельных прямых на величину Δ, причем участок L расположен в части траектории, обращенной на внешней, от механизма стороне.
Механизм вариантов II и III содержит основание 1, кривошип 2, шатун 4, выполненный угловым, на вершине угла которого установлен ролик 7. На основании 1 установлено звено (пластина) 8 в котором выполнен паз 9 или в основании выполнен паз необходимого профиля. В пазу размещен ролик 7.
Работа механизма вариантов II и III объясняется следующим образом.
При повороте кривошипа 1 ролик 7 перемещается по пазу 9, при котором точка Н шатуна описывает замкнутую кривую 6, имеющую участок L, расположенный также на внешней, относительно механизма стороне.
Работа шагающего движителя объясняется следующим образом.
При вращении кривошипа опорный башмак 10, ведомый шатуном 4, двигаясь по траектории 6, опускается на поверхность грунта и совершает шаг движителя.
Например, при работе движителя в ведущем режиме тяговое усилие, прилагаемое со стороны шатуна на шарнир башмака, и сила сцепления опорного башмака с грунтом, имеют противоположные направления, которые составляют пару сил, а расстояние от центра шарнира до плоскости опоры, точнее до точки приложения составляющей силы сцепления опорного башмака с грунтом, является плечом пары, и этот момент пары воздействует на башмак, приподнимая переднюю плоскость опоры (опрокидывая башмак), поэтому с целью снижения момента пары, шарнир на башмаке расположен возможно близко к его опорной плоскости.
Приведенные для иллюстрации в описании кинематические схемы не исчерпывают и других возможных вариантов исполнения.
Применение изобретения позволит упростить конструкцию, например, шагающих движителей, а также расширить арсенал четырехшарнирных механизмов.
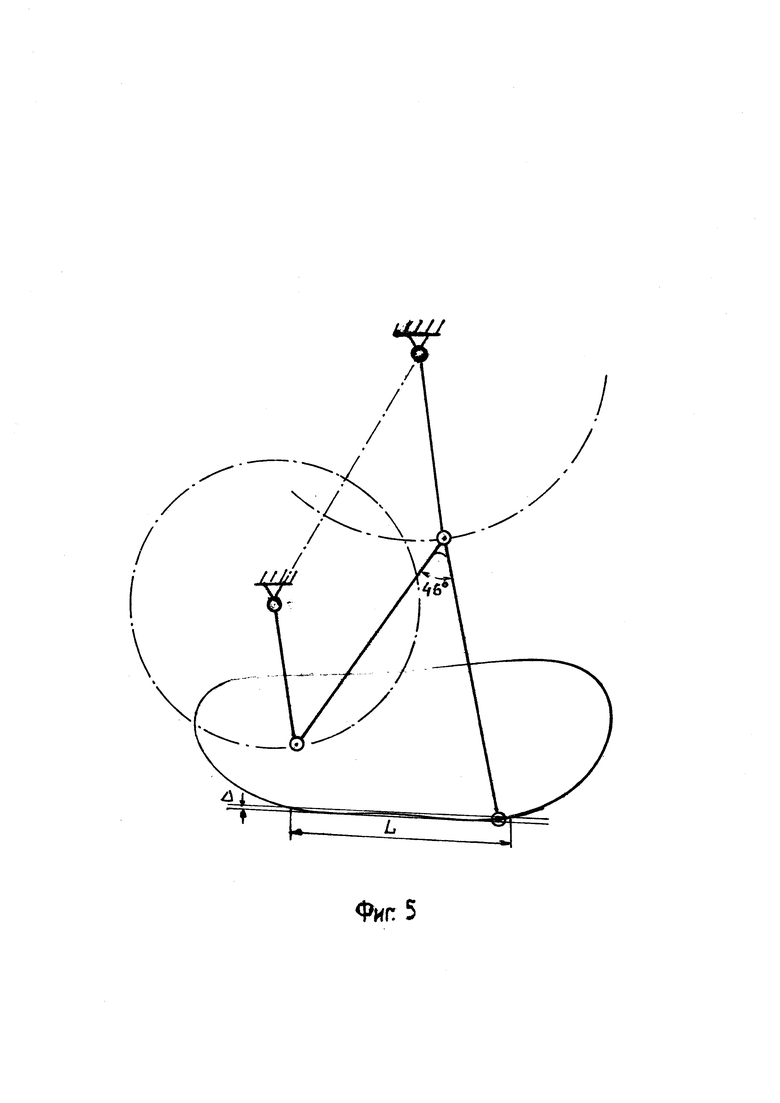
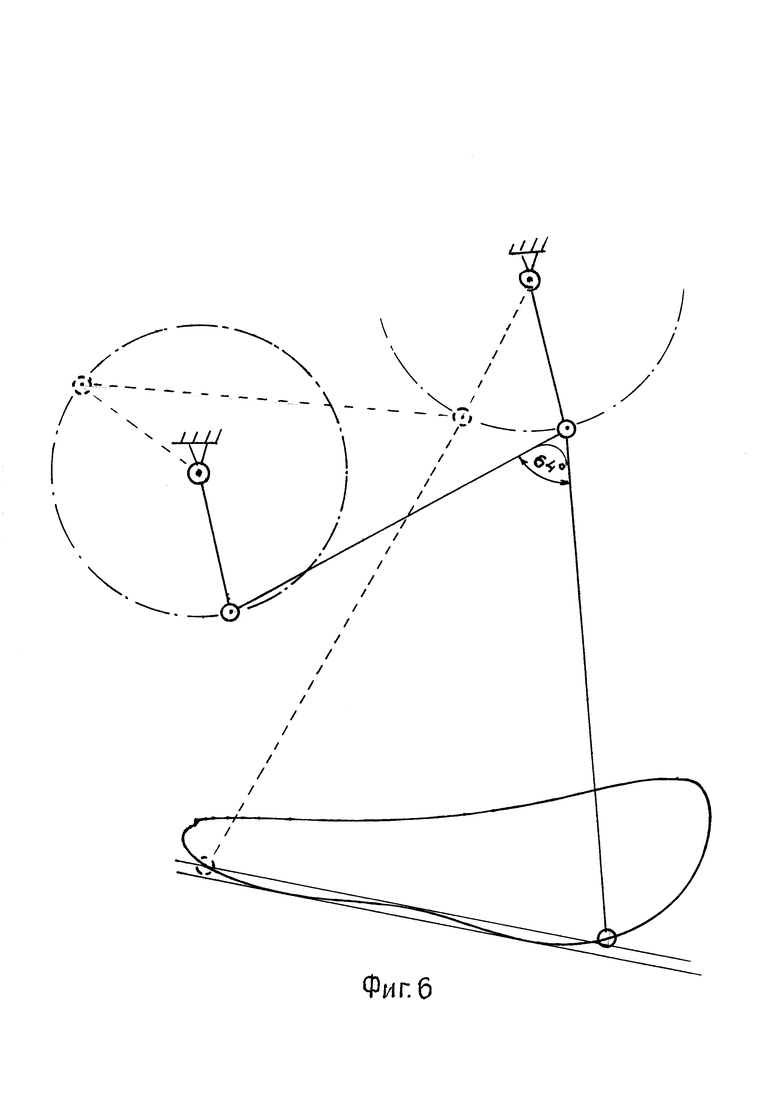
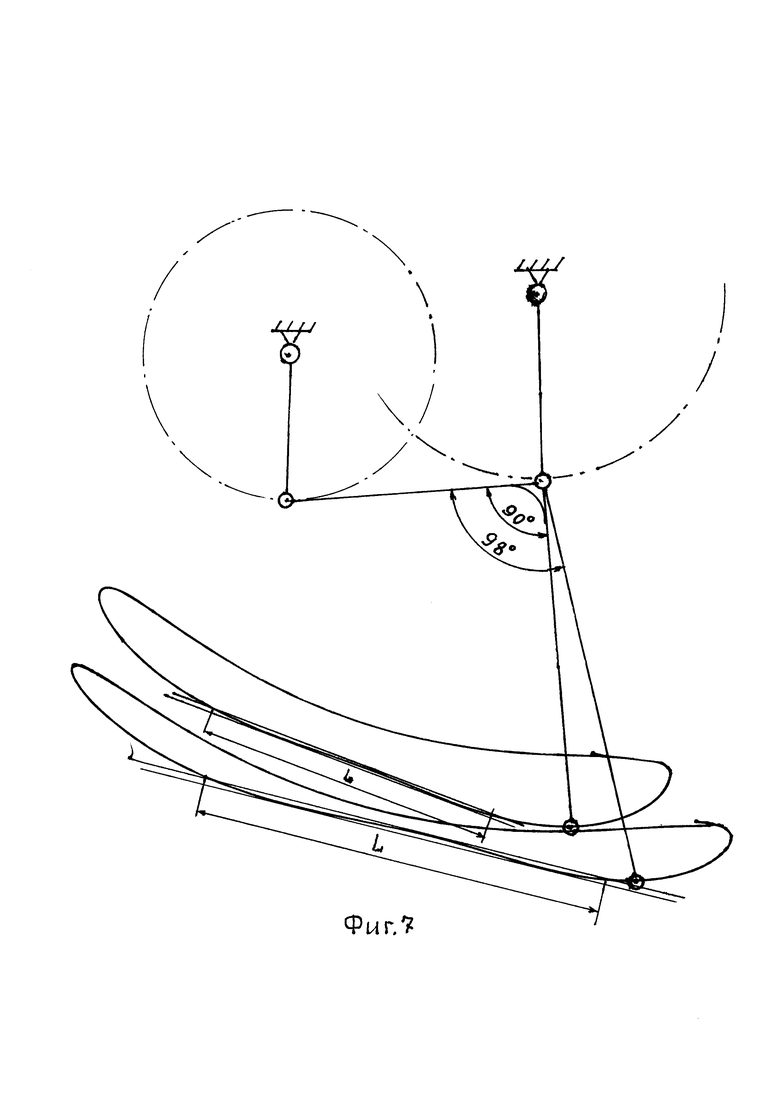
Дополнительно к заявке для подтверждения существования в траекториях движения точки соединения выходного звена углового шатуна приблизительно-прямолинейных участков L, расположенных на внешней, относительно механизма, стороне, в пределах угла шатуна ω=45÷100°, прилагаю фиг. 5, 6, 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1820099A1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |
| Шагающее колесо транспортного средства | 1989 |
|
SU1660997A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| Шагающее колесо | 2021 |
|
RU2763325C1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ (ВАРИАНТЫ) | 1995 |
|
RU2115849C1 |
| МЕХАНИЗМ | 1992 |
|
RU2054593C1 |
| Шагающее колесо | 2020 |
|
RU2747337C1 |
| ДОРОЖНО-УБОРОЧНАЯ МАШИНА | 1991 |
|
RU2029819C1 |
Изобретение относится к области машиностроения, а более конкретно к шагающим механизмам. Механизм шагающего движителя содержит основание, шарнирно связанный с ним одним концом кривошип, шарнирно связанный с другим концом кривошипа угловой шатун. Вершина шатуна кинематически связана с основанием посредством коромысла или посредством взаимодействия ролика, установленного на вершине углового шатуна с направляющей, установленной на основании. Угол, образованный прямыми, соединяющими вершину угла и шарнир кривошипа, а также вершину угла и точки соединения выходного звена шатуна, лежит в пределах 45°÷100°. Достигается упрощение конструкции. 2 н. и 2 з.п. ф-лы, 7 ил.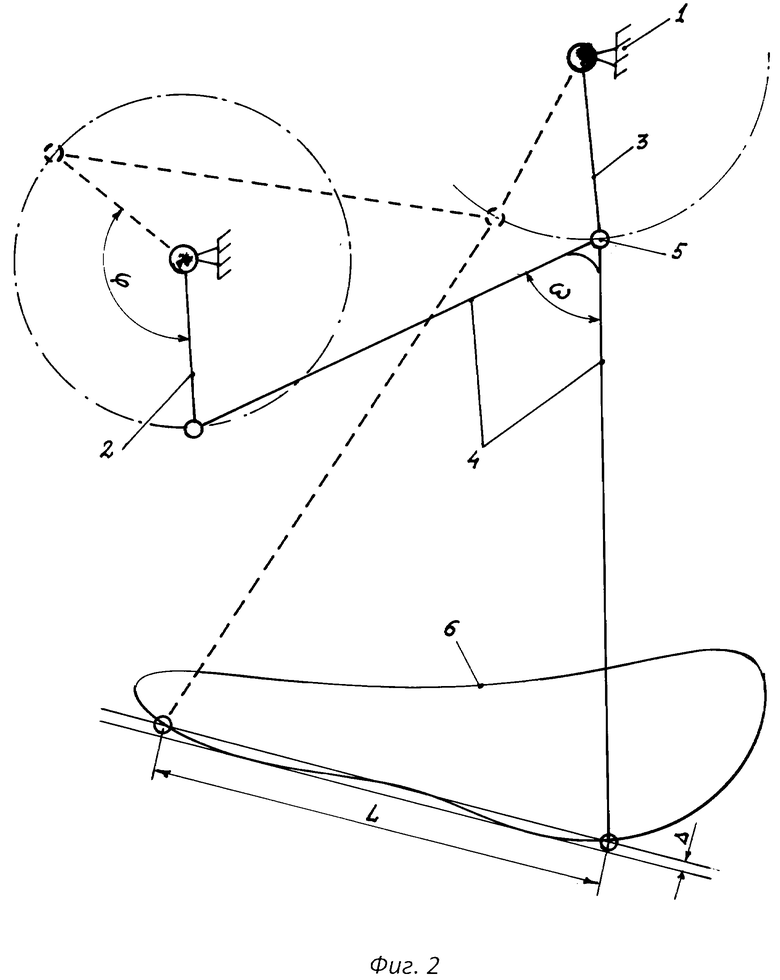
1. Механизм шагающего движителя, содержащий основание, шарнирно соединенный с ним одним концом кривошип, шарнирно связанный другим концом с шатуном, содержащим точку соединения выходного звена и выполненным угловым, вершина которого кинематически связана с основанием, отличающийся тем, что точка соединения выходного звена расположена в пределах угла ω, образованного прямой, соединяющей вершину угла углового шатуна и шарнир кривошипа, и прямой, соединяющей вершину угла углового шатуна и точку соединения выходного звена, в диапазоне 45°÷100°.
2. Механизм по п. 1, отличающийся тем, что кинематическая связь вершины шатуна с основанием, выполненного угловым, осуществлена посредством шарнирного соединения вершины угла углового шатуна с коромыслом, поворотно связанным с основанием.
3. Механизм по п. 1, отличающийся тем, что кинематическая связь вершины угла углового шатуна с основанием осуществлена посредством снабжения механизма направляющей, связанной с основанием, и роликом, установленным на вершине угла углового шатуна для взаимодействия с пазом направляющей.
4. Механизм шагающего движителя, содержащий основание, шарнирно соединенный с ним одним концом кривошип, шарнирно связанный с другим концом кривошипа шатун, содержащий точку соединения выходного звена и выполненный угловым, вершина угла которого кинематически связана с основанием, а точка соединения выходного звена на шатуне расположена в пределах угла ω, образованного прямой, соединяющей вершину угла углового шатуна и шарнир кривошипа, и прямой, соединяющей вершину угла углового шатуна и точку соединения выходного звена, в диапазоне 45°÷100°, отличающийся тем, что в точке соединения выходного звена углового шатуна поворотно установлен опорный башмак, причем шарнир на опорном башмаке расположен возможно близко к плоскости опоры башмака.
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| УСТРОЙСТВО для ПРОВЕРКИ ИДЕНТИЧНОСТИ СЕЙСМОПРИЕМНИКОВ | 0 |
|
SU182350A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2207283C2 |
| Артоболевский И.И | |||
| "Механизмы в современной технике", 2-е изд., переработанное | |||
| т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для обрезывания караваев теста | 1921 |
|
SU317A1 |
| ПОРТСИГАР С ПРИСПОСОБЛЕНИЕМ ДЛЯ СКРУЧИВАНИЯ ПАПИРОС | 1922 |
|
SU621A1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |
| ШТАММ БАКТЕРИЙ BACILLUS MESENTERICIIS SP. RENNINUS № 61 | 0 |
|
SU185821A1 |

