оо СП
05
Изобретение относится к устройствам для манипулирования обрабатываемыми изделиями, конструктивно сопряженным со станками и установленным в поточной линии, а также, к особенностям комбинирования и агрегатирования станков, относящимся к транспортировке обрабатываемых изделий между -станками.
Известна роторно-конвейерная линия с двумя горизонтально-замкнутыми, оснащенными носителями, предметов обработки конвейерами, которыми обогнуты прерывисто вращаемые звездочки, содержащая средство контроля наличия предметов обработки в носителе, установленное на первом конвейере и кинематически связанное с блокирующим механизмом, расположенным с возможностью взаимодействия с механизмом прерывистого вращения второго конвейера, выполненным в виде храпового колеса с двумя собачками, и привод прерывистого вращения 1.
Однако наряду с этим преимуществом такие ротороно- конвейерные линии имеют некоторые недостатки, а именно: подающий конвейер, помимо перемещения, которое необходимо непосредственно для транспортировки предметов обработки, после каждого такого перемещения на щаг дополнительно поворачивается в сторону принимающего конвейера, что весьма усложняет конструкцию линии. Кроме того, указанный поворот подающего конвейера соверщается не только при необходимости, т. е. когда в очередном носителе подающего конвейера на позиции разгрузки находится предмет обработки, но и в том случае, когда этот носитель пуст. Следовательно, если в по-. дающем конвейере много пустых носителей, то в процессе работы линии соверщается значительное количество сложных «холостых движений, что неизбежно снижает надежность ее работы.
Цель изобретения - повыщение надежности работы роторно-конвейерной линии.
Поставленная цель достигается тем, что в роторно-конвейерной линии с двумя горизонтально-замкнутыми оснащенными носителями предметов обработки конвейерами, которыми обогнуты прерывисто вращаемые звездочки, содержащая средство контроля наличия предметов обработки в носителе, установленное на первом конвейере и кинематически связанное с блокирующим механизмом, расположенным с возможностью взаимодействия с механизмом прерывистого вращения второго конвейера, выполненным в виде храпового колеса с двумя собачками, и привод прерывистого вращения, привод прерывистого вращения и звездочки первого и второго конвейеров с механизмами их прерывистого
вращения соосно установлены на дополнительно введенную в линию колонну, при этом привод прерывистого вращения кинематически связан с механизмом контроля,
который выполнен в виде щупа, а блокирующий механизм выполнен в виде щитка, установленного с возможностью взаимодействия с рабочим участком храпового колеса.
Кроме того, линия снабжена электромагнитом и индуктивным преобразователем, при этом последний установлен с возможностью взаимодействия с щупом, а якорь электромагнита - с щитком.
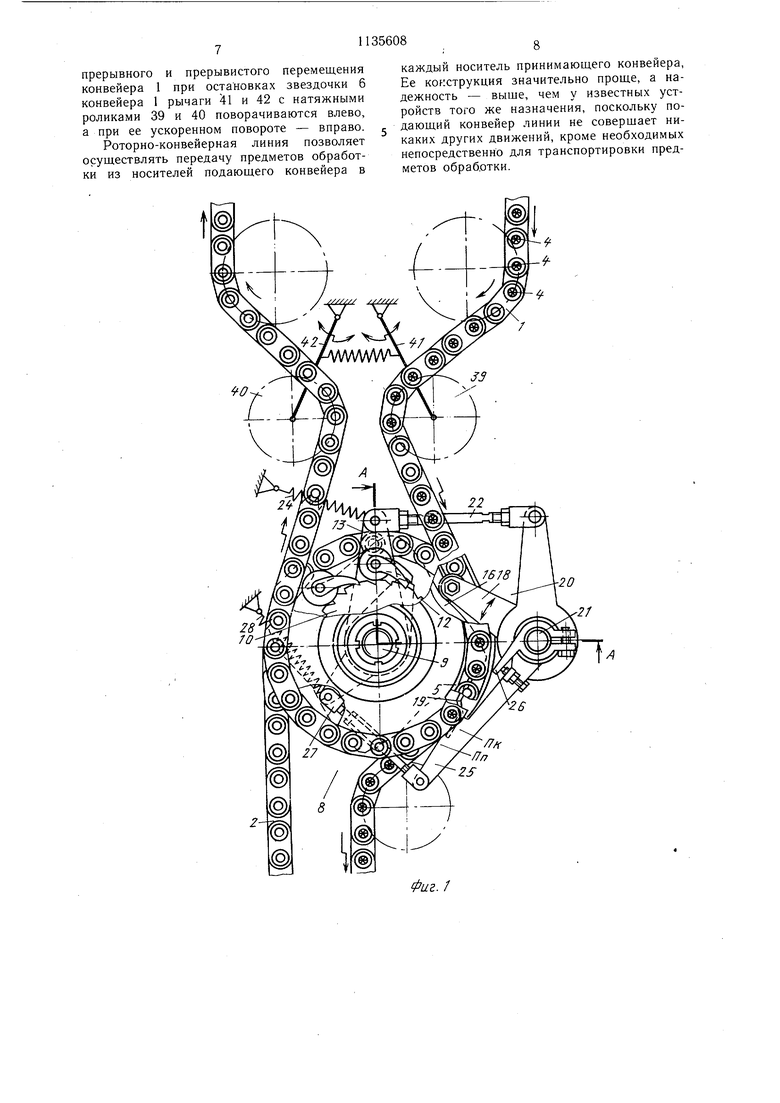
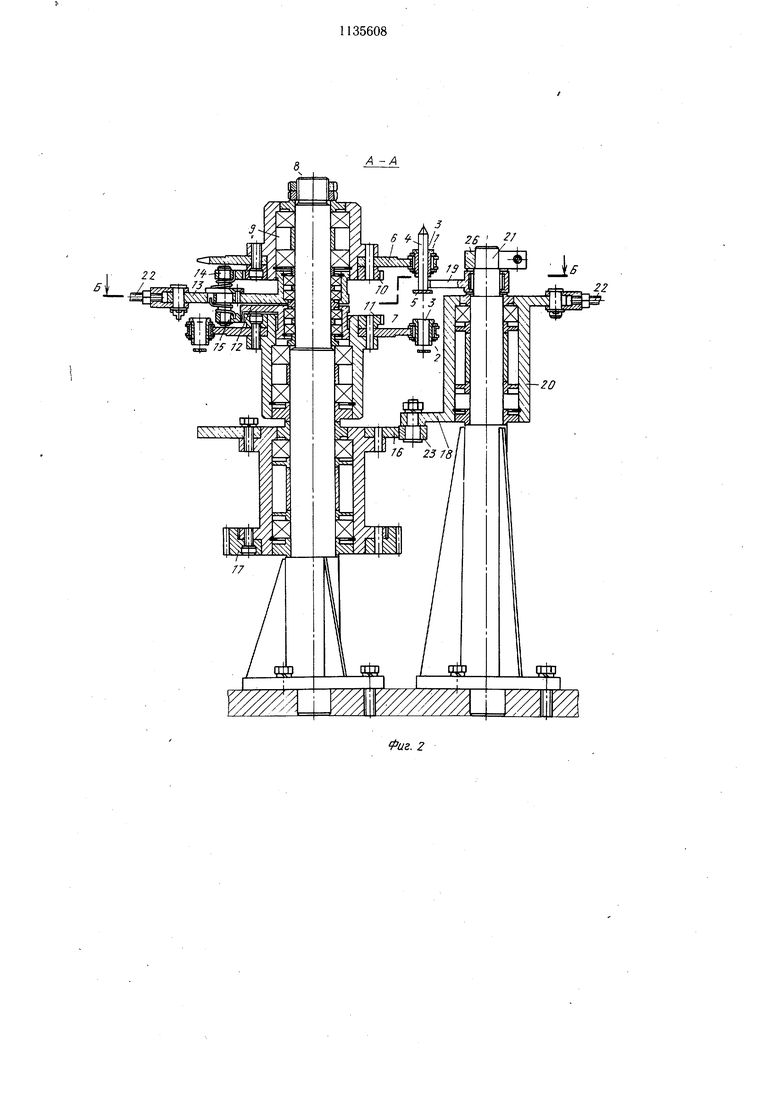
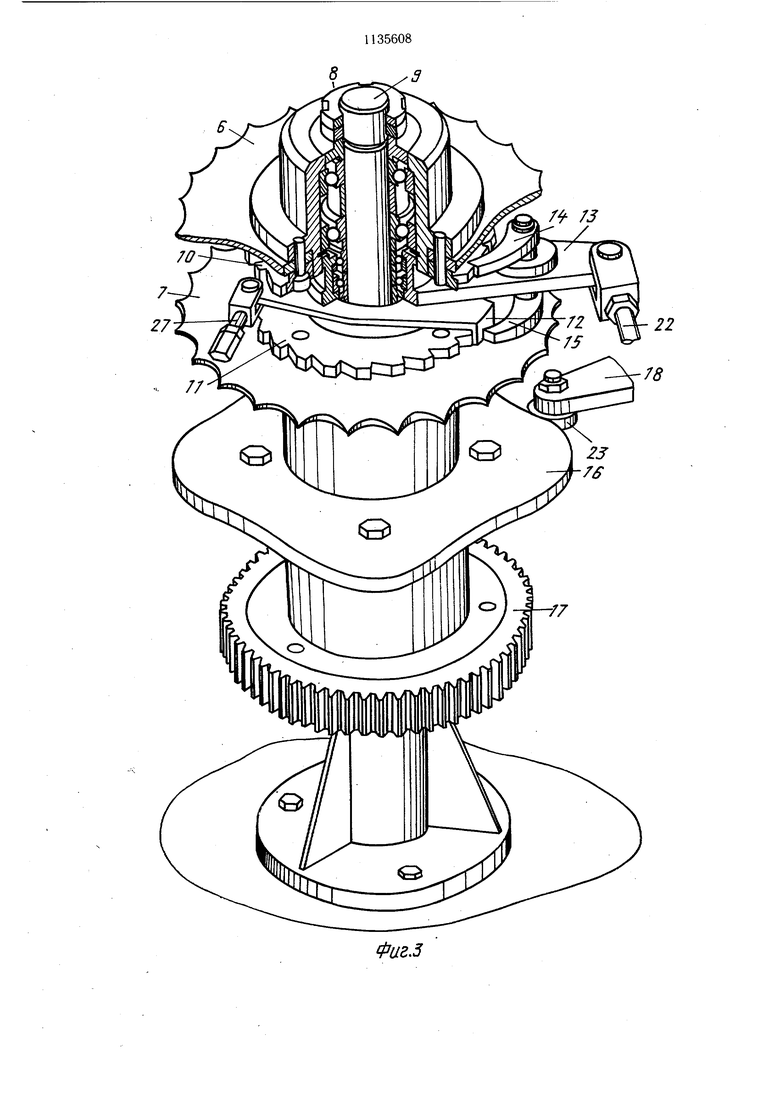
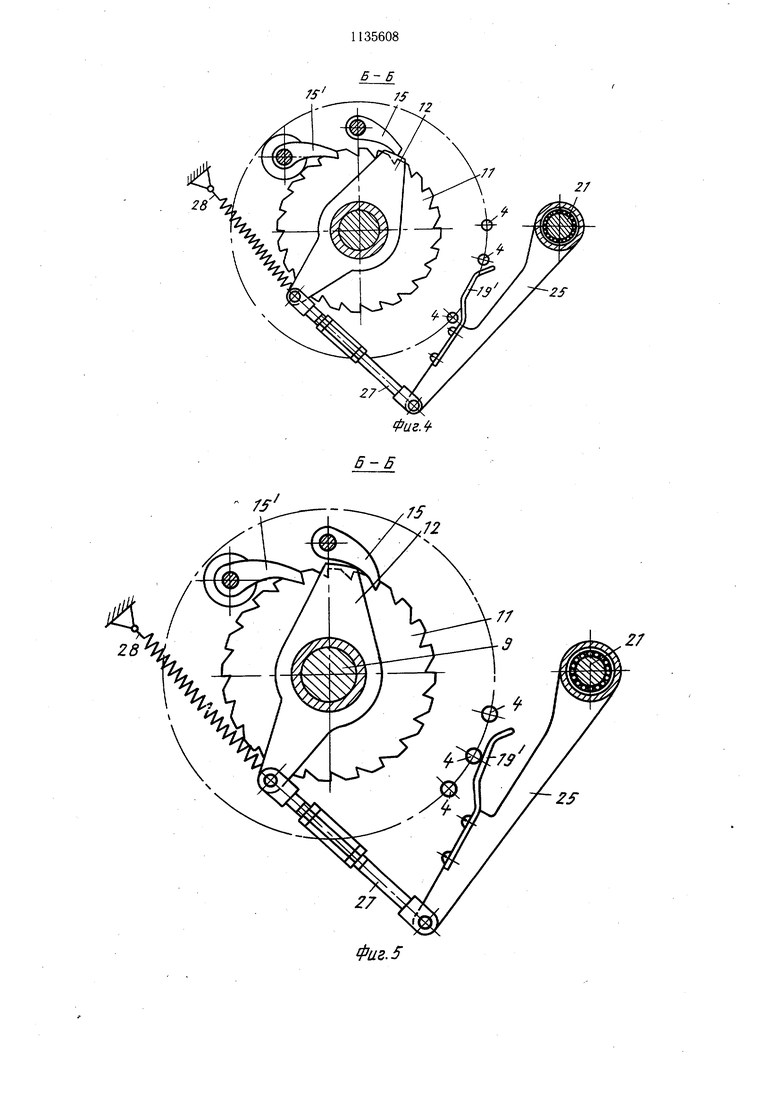
На фиг. 1 изображена роторно-конвейерная линия, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - пространственное изображение колонны с механизмами; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - то же, при наличии детали
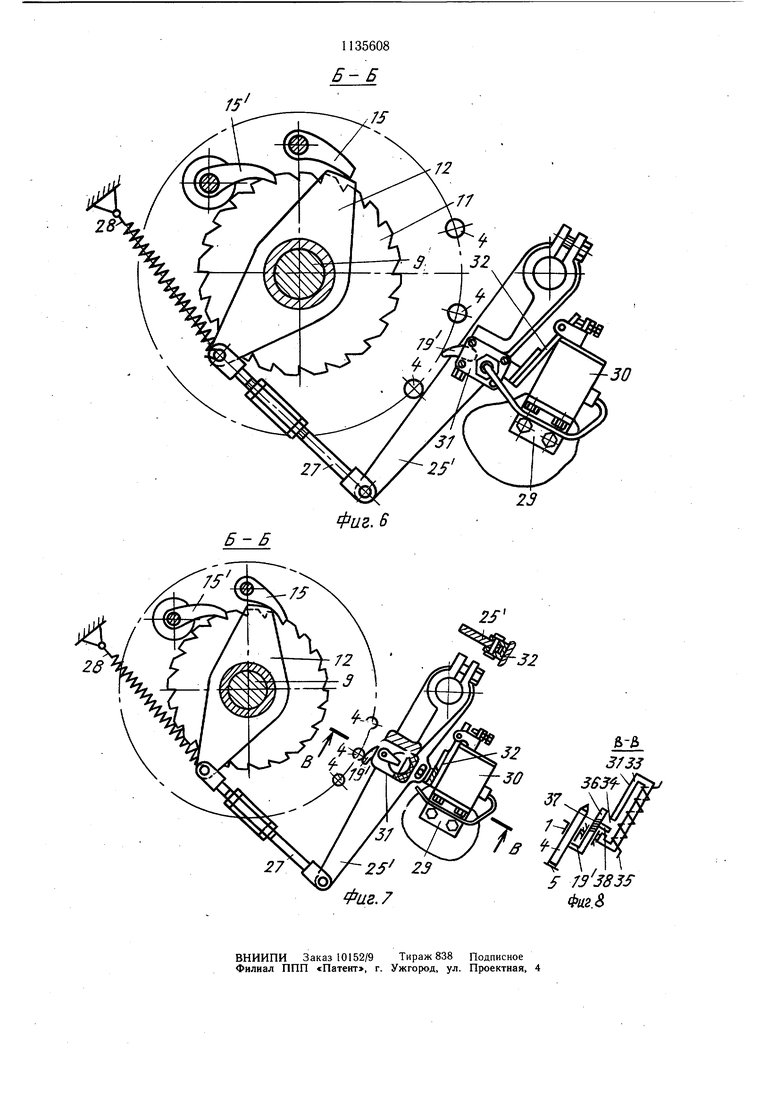
Q в носителе; на фиг. 6 - то же, при взаимодействии щупа с индуктивным преобразователем; на фиг. 7 - то же, при наличии детали в носителе; на фиг. 8 - сечение В-В на фиг. 7.
Роторно-конвейерная линия (фиг. 1) содержит два горизонтально-замкнутых конвейера; подающий конвейер 1 н принимающий конвейер 2. КЬнвейеры 1 и 2 представляют собой пластинчатые роликовые цепи с полыми шарнирами, в которых
размещены носители 3 предметов 4 обработки, носители 3 подающего конвейера 1 выполнены сквозными, и под ними размещен поддон 5. Подающим конвейером 1 обогнуты роторные загрузочное устройство, а также технологические роторы (не показаны), где предметы 4 подвергаются необходимой обработке, а затем - прерывисто вращаемая звездочка 6.
В результате возможных сбоев в работе роторного загрузочного устройства и удаQ лении из носителей 3 бракованных предметов 4 обработки, в подающем конвейере 1 могут быть пустые носители 3. Конвейер 2 выполнен принимающим предметы 4 обработки из носителей 3 подающего конвейера 1 в каждый свой носитель 3, что необходимо для последующей подачи предметов 4 обработки на сборочные или упаковочные операции, качественное выполнение подобных операций возможно лищь при обеспечении полного набора комплекQ туемых предметов. Принимающим конвейером 2 обогнута прерывисто вращаемая звездочка 7. Подающий конвейер 1 снабжен средством контроля наличия предметов 4 обработки в его носителях 3.
Для осуществления передачи предметов 4
5 обработки из носителей подающего конвейера 1 в каждый носитель принимающего конвейера 2 линия снабжена ротором передачи 8. Этот ротор 8 выполнен в виде
колонны 9 (фиг. 2);, на которой свободно посажена упомянутая звездочка 6 подающего конвейера 1, а ниже - звездочка 7 принимающего конвейера 2, так что конвейеры 1 и 2 имеют в плане общий участок, на котором их носители 3 расположены соосно. Ротор 8 оснащен также кулачковохраповым механизмом с двумя храповыми колесами 10 и 11. Первое храповое колесо 10 жестко связано со звездочкой б подающего конвейера 1 и расположено под ней, второе храповое колесо 11 жестко связано со звездочкой 7 принимающего конвейера и расположено над ней.
Второ е храповое колесо 11 (фиг. 2 и 3) снабжено щитком 12, которым закрыт рабочий участок этого, колеса. Между храповыми колесами 10 и 11 (фиг. 2 и 3) на колонне свободно посажено водило 13, на котором установлены на осях: сверху - собачка 14, а снизу - собачка 15, взаимодействующие соответственно с храповыми колесами 10 и 11. Под звездочкой 7 на колонне 9 свободно посажен кулачок 16 кулачково-храпового механизма. Кулачок 16 приводится в постоянное вращение через жестко связанное с ним зубчатое колесо 17 (привод колеса 17 не показан). Коромысло 18 кулачково-храпового механизма кинематически связано с водилом 13 (фиг. 1). Указанное средство контроля наличия предметов 4 в носителях 3 подающего конвейера 1 выполнено в виде щупа 19 этих предметов. Щуп 19 управляет щитком 12 второго храпового колеса 11.
Коромысло 18, взаимодействующее с кулачком 16, является нижним плечом двуплечего рычага 20 (фиг. 1 и 2), который свободно посажен на размещенной рядом ,с ротором 8 неподвижной оси 21.
Упомянутая связь коромысла 18 с водилом 13 осуществляется с помощью тяги 22.
Коромысло 18 имеет на конце ролик 23, взаимодействие которого с кулачком 16 обеспечивается .пружиной 24.
Щуп 19 предметов 4 в носителях 3 подающего конвейера 1 установлен на рычаге 25, свободно посаженном на неподвижной оси 21 над двуплечим рычагом 20. На эдой же оси 21 закреплен упор 26, ограничиЕгающий поворот рычага 25.
В случае, если предметы 4 обработки достаточно прдчны, щуп 19 этих предметов в носителях 3 подающего конвейера 1 осуществляет управление щитком 12 второго храпового колеса 11 за счет кинематической связи с щитком 12. При этом щуп 19 жестко укреплен на рычаге 25, а конец этого рычага 25 тягой 27 связан с щитком 12. Взаимодействие щупа 19 с предметом 4 обработки в очередном носителе 3 подающего конвейера 1 обеспечивается пружиной 28.
Если же предметы 4 обработки хрупки или легкодеформируемы, то ротор 8 передачи оснащен стационарно установленным на кронщтейне 29 электромагнитом 30, на рычаге 25 закреплен управляющий этим электромагнитом 30 индуктивный преобразователь 31. Щуп 19 выполнен с возможностью взаимодействия с индуктивным преобразователем 31, а якорь 32 электромагнита 30 кинематически связан с щитком 12 второго храпового колеса 11, о чем подробнее сообщено ниже.
Индуктивный преобразователь 31 представляет собой С-образный сердечник 33 с щелью 34, имеющий обмотку 35. Щуп 19 является плечом двуплечего рычага 36 и в исходном состоянии под взаимодействием пружины 37 и упора (не показан) занимает положение, показанное на фиг. 4. Второе плечо 38 рычага 36 при этом расположено у входа в щель 34 С -образного сердечника 33 индуктивного преобразователя 31.
Якорь 32 электромагнита 30 выполнен в виде поворотной крыщки (открытой при выключенном электромагните 30). Кинематическая связь якоря 32 с щитком 12 осуществлена за счет того, что свободный конец якоря 32 щарнирно соединен с рычагом 25 который, в свою очередь, аналогичным указанному выще образом тягой 27 связан с щитком 12.
Подающий конвейер 1 огибает также подпружиненные натяжные ролики 39 и 40, установленные на рычагах 41 и 42 (фиг. 1).
Роторно-конвейерная линия работает следующим образом.
При включении привода (не показан) зубчатое колесо 17 и жестко связанный с ним кулачок 16 приводится в непрерывное вращение. При этом коромысло 18 и рычаг 20 совершают колебательное движение, которое через тягу 22 передается водилу 13. При повороте водила 13 вправо установленная на нем верхняя собачка 14 поворачивает на один зуб храповое колесо 10. Одновременно поворачивается жестко связанная с ним звездочка 6, и подающий конвейер 1 перемещается на щаг. Пижняя собачка 15, установленная на водиле 13, благодаря щитку 12 не всегда находится в зацеплении с храповым колесом 11, о ее работе подробно сообщено ниже. При возвращении водила 13 в исходное положение (т. е. после его поворота влево) вторая собачка 14 храпового колеса 10 фиксирует его положение, а собачка 14 входит в зацепление с его следующим зубом. Таким образом, непрерывное вращение кулачка 16 преобразуется в прерывистое перемещение подающего конвейера 1 на участке между натяжными роликами 39 и 40.
Перемещение принимающего конвейера 2 зависит от наличия предметов 4 в носителях 3 подающего конвейера 1 и регулируется щупом 19 этих предметов 4 в носителях 3 подающего конвейера на контрольной позиции Пк. При наличии предмета 4 в очередном носителе 3 подающего конвейера 1 на контрольной позиции П. щуп 19 занимает такое положение, при котором управляемый им щиток 12 не препятствует зацеплению нижней собачки 15, установленной на водиле 13, с храповым колесом 11. Тогда при повороте водила 13 вправо собачка 15 поворачивает на один зуб храповое колесо 11, которое фиксирует в этом положении собачка 15, и принимающий конвейер 2 перемещается на шаг. Таким образом, при наличии предмета 4 в носителе 3 конвейера 1 на контрольной позиции Пк. как подающий конвейер 1, так и принимающий конвейер 2 совершают перемещение на шаг. При этом предмет 4 в очередном носителе 3 конвейера 1 перемещается из контрольной позиции Пк в поз-ицию передачи Пп и, поскольку поддон 5 окончился между позицией П и позицией Пд, опускается из сквозного носителя 3 верхнего конвейера 1 в соосный пустой носитель 3 нижнего конвейера 2.
Если же очередной носитель 3 подающего конвейера 1 на контрольной позиции Пк пуст, то щуп 19 занимает такое положение,, при котором управляемый им щиток 12 закрывает зубья храпового колеса 11 на его рабочем участке и выводит собачку 15 из зацепления с этим колесом 11. Тогда при повороте водила 13 вправо собачка 15 лишь продвигается по щитку 12, но не поворачивает храпбвое колесо 11, и принимающий конвейер 2 стоит на месте. Таким образом, при отсутствии предмета 4 в носителе 3 конвейера 1 на контрольной позиции Пк лишь подающий конвейер 1 соверщает перемещение на щаг, а принимающий конвейер 2 стоит на месте, и в позиции передачи Пп- остается его ранее заполненный предметом 4 носитель 3. В результате, неслютря на возможные пропуски предметов 4 в носителях 3 подающего конвейера 1, носители 3 принимающего конвейера 2 заполнены без пропусков.
Далее более подробно разъяснено, каким образом щуп 19 управляет щитком 12.
В роторно-конвейерной линии, предназначенной для обработки достаточно прочных предметов, очередной предмет 4 в носителе 3 конвейера 1 на позиции Пц воздействует на щуп 19, жестко укрепленный на рычаге 25. В результате рычаг 25 поворачивается на оси 21 вправо и через тягу 27 поворачивает щиток 12, который благодаря этому открывает рабочий участок храпового колеса 11. Собачка 15входит в зацепление с этим колесом 11, а затем при перемещении на щаг подающего конвейера 1, принимающий конвейер 2 тоже перемещается на щаг.
Если очередной носитель 3 конвейера 1 на позиции Пк пуст (фиг. 4), то рычаг 25 с щупом 19 под действием пружины 28 поворачивается влево до упора 26 и через тягу 27 поворачивает щиток 12, который закрывает рабочий участок храпового колеса И. В результате собачка15 выходит из зацепления с храповым колесом 11 и при перемещении подающего конвейера 1, как было разъяснено выще, принимающий конвейер 2 остается на месте.
В роторно-конвейерной линии, предназначенной для обработки легкоповреждаемых предметов, очередной предмет 4 воздействует на щуп 19 (который является плечом двуплечего рычага 36). При этом
0 второе плечо 38 этого рычага 36 входит в .щель 34 сердечника 33 индуктивного преобразователя 31. Благодаря этому изменяется индуктивное сопротивление обмотки 35, и управляющая электрическая цепь (не показана) включает электромагнит 30. При этом якорь 32 притягивается к стационарно установленному корпусу электромагнита 30 и поворачивает вправо рычаг 25, который через тягу 27 поворачивает щиток 12. В результате открывается рабочий
0 участок храпового колеса II, и собачка 15 входит в зацепление с его зубьями. Далее при перемещении на щаг подающего конвейера 1 принимающий конвейер 2 тоже перемещается на шаг, и очередной предмет 4 переходит из носителя 3 конвейера 1
5 в пустой носитель 3 конвейера 2.
Когда воздействие предмета 4 на щуп 19заканчивается, то рычаг 36, якорь 32, рычаг 25 и щиток 12 возвращаются в исходное положение, которое исключает переQ мещение принимающего конвейера 2. Следующее перемещение конвейера 2 происходит только после следующего воздействия предмета 4 в каком-либо носителе 3 конвейера 1 на контрольной позиции Пр на щуп 19. Таким образом, несмотря
5 на возможные пропуски предметов 4 в носителях 3 подающего конвейера 1, оказываются заполненными предметами 4 все носители 3 принимающего конвейера 2. Подающий конвейер 1 на дуге огибаQ ния ротора 8 (фиг. 1) между роликами 39 и 40 перемещается прерывисто. Однако, поскольку технологические роторы (не показаны) роторно-конвейерных линий, как правило, вращаются непрерывно, то за пределами указанного участка конвейер I
5 перемещается непрерывно. При этом средняя скорость прерывистого перемещения конвейера 1 равна скорости его непрерывного перемещения. Для согласования непрерывного и прерывистого перемещения конвейера 1 при остановках звездочки 6 конвейера 1 рычаги 41 и 42 с натяжными роликами 39 и 40 поворачиваются влево, а при ее ускоренном повороте - вправо. Роторно-конвейерная линия позволяет осуществлять передачу предметов обработки из носителей подающего конвейера в
каждый носитель принимающего конвейера, Ее конструкция значительно проще, а надежность - выще, чем у известных устройств того же назначения, поскольку подающий конвейер линии не соверщает никаких других движений, кроме необходимых непосредственно для транспортировки предметов обработки.
Фаг.5
27
2S
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная линия | 1985 |
|
SU1261770A1 |
| Роторно-конвейерная линия | 1980 |
|
SU952533A1 |
| Способ изготовления изделий типа фильтров и роторно-конвейерная линия для их изготовления | 1990 |
|
SU1782773A1 |
| Роторно-конвейерная машина | 1978 |
|
SU831627A1 |
| Роторно-конвейерная машина для сортировки изделий | 1980 |
|
SU902866A1 |
| Автоматическая линия для изготовления деталей | 1984 |
|
SU1207580A1 |
| Роторно-конвейерная машина | 1985 |
|
SU1286428A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1084203A1 |
| Транспортно-накопительный участок автоматических роторно-конвейерных линий | 1988 |
|
SU1569185A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
1. РОТОРНО-КОНВЕЙЕРНАЯ ЛИНИЯ с двумя, горизонтально-замкнутыми, оснащенными носителями предметов обработки конвейерами, которыми обогнуты прерывисто вращаемые звездочки, содержащая средство контроля наличия предметов обработки в носителе, установленное на первом конвейере и кинематически связанное с блокирующим механизмом, расположенным с возможностью взаимодействия с механизмом прерывистого вращения второго конвейера, выполненным в виде храпового колеса с двумя собачками, и привод прерывистого вращения, отличающаяся тем, что, с целью повыщения надежности работы линии, привод прерывистого вращения и звездочки первого и второго конвейеров с механизмами их прерывистого вращения соосно установлены на дополнительно введенную в линию колонну, при этом привод прерывистого вращения кинематически связан с механизмом контроля, который выполнен в виде щупа, а блокирующий механизм выполнен, в виде щитка, установленного с возможностью взаимодействия с рабочим участком храпового колеса. 2. Линия по п. 1, отличающаяся тем, что она снабжена электромагнитом и индуктивным преобразователем, при этом последний установлен с возможностью вза(О имодействия с щупом, а якорь электромагнита - с щитком.
5-Б
Фаг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 2252499, кл | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Приспособление для выделки кирпичей с замкнутой со всех сторон полостью | 1925 |
|
SU1941A1 |
