fO
00
ю о ю о
VI
мерность дробления шага дискретности получается высокой. Изменение абсолютных значений скоростей указанных переме- щений для различных периодов компенсируется путем расчета дробной части как отношения количества заполняющих импульсов от начала или от конца периода до сигнала от контролируемого объекта к их количеству за этот период. Объект вместе с чувствительным элементом датчика 1 перемещений приводится в равномерное по возможности поступательное или вращательное движение, при этом на выходе датчика 1 формируется периодический сигнал, несущий информацию о величине перемещения объекта. Этот сигнал с помощью формирователей 2 и 3 коротких импульсов преобразуется в две последовательности импульсов с тем же периодом, но сдвинутых относительно друг друга по фазе на 180. По мере движения объекта относи- тельно узла А фиксации контролируемых элементов объекта на выходе формирователя 5 коротких импульсов возникают импульсы такие, что между каждой парой из них возникает несколько импульсов с формирователей 2 и 3. Импульсные информационные сигналы с формирователей 2, 3 и 5 используются для счета целого числа шагов дискретности датчика 1 перемещений в счетчике 7 и для определения временных эквивалентов текущих шагов дискретности и их дробных частей винтерполятореб. Полученная информация подвергается окончательной обработке в вычислителе 9. 2 с. и 2 з.п.ф-лы, 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ЧАСТОТОМЕР | 1996 |
|
RU2097774C1 |
| Цифровой датчик линейных перемещений | 1990 |
|
SU1739185A1 |
| Цифровой частотомер | 2019 |
|
RU2730047C1 |
| ПЛКЙТНО-ИХШЕСЙА*ЬИБ;1ИО'^ЕКАГ. Л. Биланов | 1972 |
|
SU342297A1 |
| Устройство для измерения внутреннего угла синхронной машины | 1984 |
|
SU1226331A1 |
| Цифровой частотомер | 1985 |
|
SU1275314A2 |
| Фазоизбирательное устройстводля дВигАТЕля ВНуТРЕННЕгО СгОРАНия | 1979 |
|
SU807112A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2300112C2 |
| Цифровой фазометр | 1984 |
|
SU1213432A1 |
Изобретение относится к измерительной технике. Целью изобретения является повышение точности за счет повышения равномерности расстановки точек деления. периода при интерполировании шага дискретности преобразователя перемещений. Инерционность перемещаемых механических узлов в сочетании с малой протяженно- стью интерполируемых участков обеспечивает .высокую степень равномерности перемещения чувствительного элемента преобразователя, поэтому, учитывая стабильность заполняющей частоты, равно(Л С
Изобретение относится к измерительной технике и может быть использовано при измерениях длин и углов, заданных с помощью многозначных мер в виде расстояний между штрихами линейных мер, углов между боковыми гранями угловых призматических мер или штрихами угловых лимбов и растров и т.д.
Целью изобретения является повышение точности измерения длин и углов путем повшения равномерности расстановки точек деления периода при интерполировании шага дискретности датчика перемещений.
Цель достигается за счет того, что по способу измерения длин или углов, заключающемуся в том, что объект связывают с датчиком линейных или угловых перемещений, равномерно перемещают объект вдоль линии измерения, фиксируют моменты прохождения контролируемых элементов объекта относительно неподвижной отсчетной точки, а о величине измеряемых длин или углов судят по величинам соответствующих перемещений объекта, зафиксированных по выходным сигналам датчика перемещений с интерполяцией шага дискретности последнего, операцию измерения осуществляют следующим образом: отдельно производят счет целого числа шагов дискретности датчика перемещений, укладывающихся в измеряемой величине, а для определения соответствующих дробных частей шагов дискретности датчика перемещений заполняют его выходной сигнал последовательностью импульсов с образцовой частотой повторения, в заданное число раз превышающей частоту повторения вы5 ходного сигнала датчика, подсчитывают количество заполняющих импульсов от начала или от конца периода выходного сигнала датчика, внутри которого возникает сигнал от контролируемого элемента объекта, до
10 этого сигнала и количество заполняющих импульсов между отсчетными точками указанного периода и находят их отношение.
При применении предлагаемого способа высокая точность расстановки интерпо15 лирующих импульсов достигается за счет того, что внутри интерполируемых-участков, учитывая их малую протяженность, а также инерционность перемещаемых механических узлов, неравномерность перемещения
0 чувствительного элемента датчика практически отсутствует, поэтому благодаря ста- бильности заполняющей частоты равномерность дробления шага дискретности получается высокой. Изменение абео25 лютных значений скоростей этих перемещений для различных периодов ком- ппенсируется за счет расчета дробной части как отношения указанных выше количеств импульсов. .
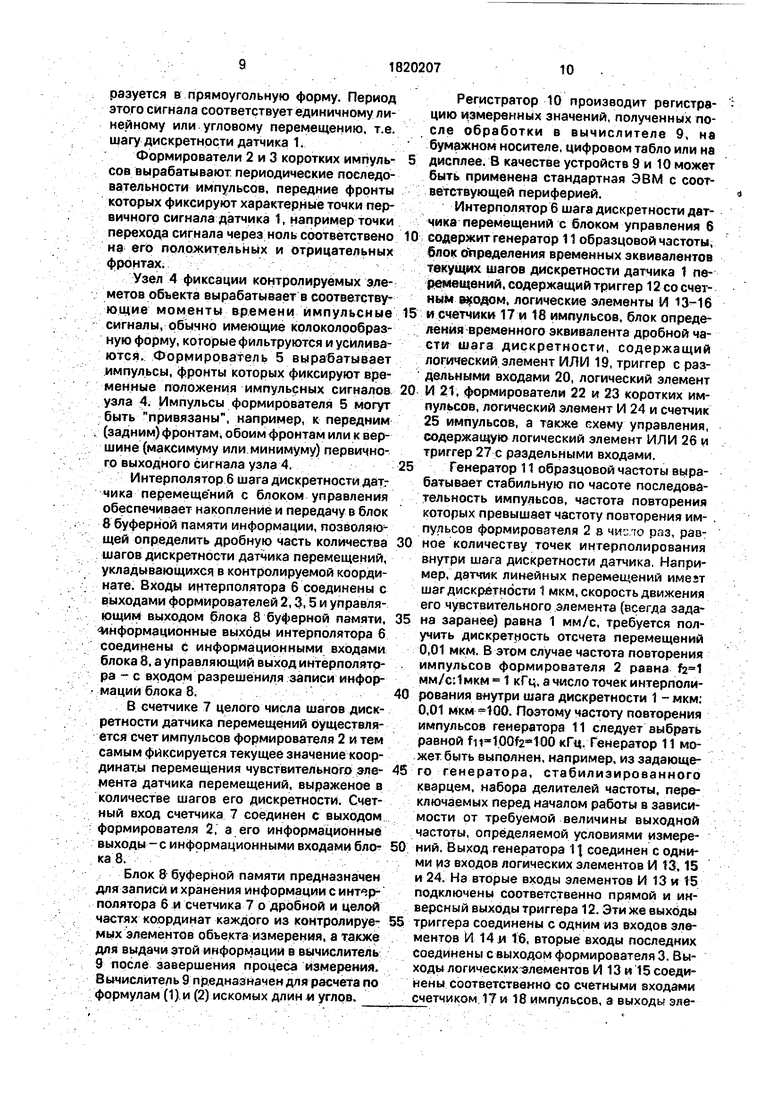
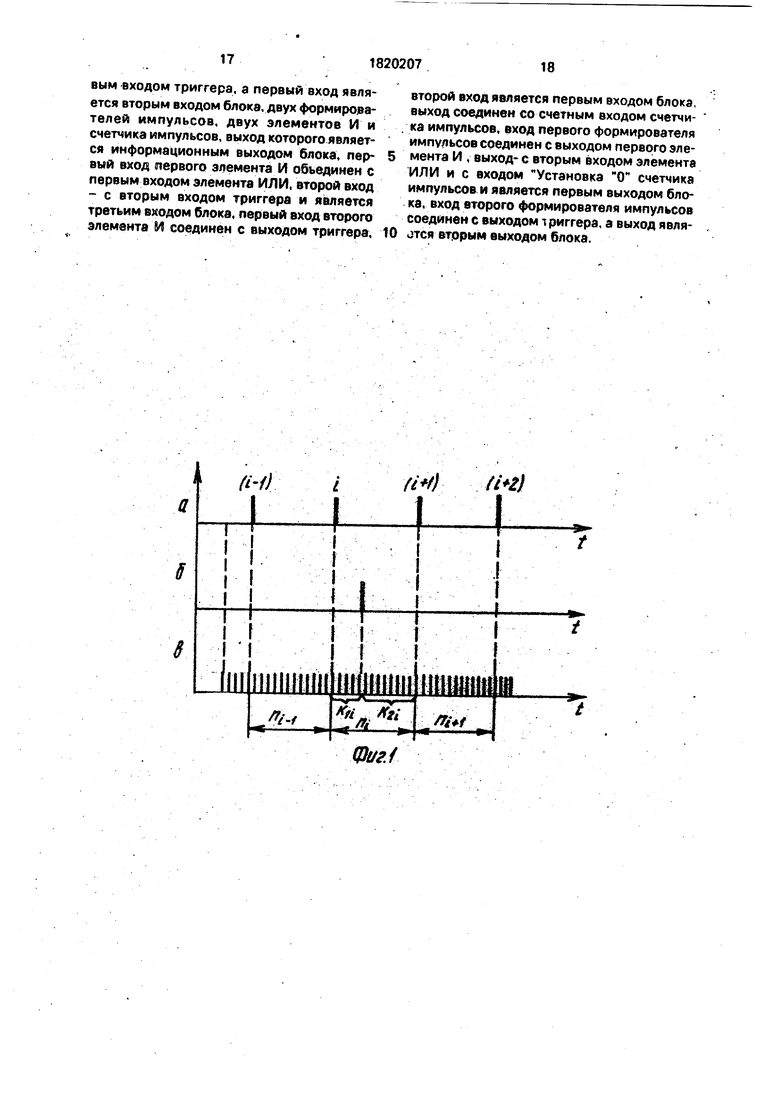
30 Предлагаемый способ поясняется временными диаграммами на фиг. 1, где а - временная последовательность узловых точек отсчета периодов выходного сигнала датчика; б - временное положение момента про- 5
хождения чувствительным элементом датчика контролируемой координаты; в - временнаяпоследовательностьвысокочастотных заполняющих импульсов.
Суть предложенного способа заключается в следующем.
Начиная с некоторого момента времени to (который может быть любым, поскольку измерению подлежит разность координат относительно одной и той же отсчетной точки), ведется подсчет числа периодов выходного сигнала датчика (последовательность а), а также количество импульсов заполнения (последовательность в) между узловыми точками отсчета периодов сигнала преобразователя П| для каждого из этих периодов. При появлении сигнала последовательности б фиксируются числа Кц или K2i, характеризующие временное расположение отсчетного импульса последовательности б относительно начальной или конечной узловой точки включающего его в себя периода выходного сигнала датчика. При Этом пространственная координата xi находится суммированием целой и дробной частей периода выходного сигнала датчика по формулам, очевидным из фиг. 1:
или -x,(l.+ 1.) . (1) .
где с - цена деления шага дискретности датчика перемещений в измеряемых единицах, например микрометрах или угловых секундах.
По мере движения объекта измерения последовательно фиксируются согласно изложенному пространственные координаты Хо, xi,x2,...,xfsi... всех контролируемых элементов (штрихов, граней и т.п.) объекта из- .мерения (всего (N+1) элементов).
Искомые длины или углы определяются как разности вышеуказанных координат по одной из формул:
Х1-ХО; Х2-Х1,- ХЗ-Х2,1 ... XN-XN-1
(2)
или xi-xo; х2-хо; хз-х0;... XN-XO
в зависимости от требуемой формы представления результатов измерений. . . Известны устройства для измерения длин и углов содержащие привод для перемещений объекта в направлении линии измерения, датчик линейных или угловых перемещений, чувствительный элемент которого связан с подвижной частью привода,
перемещаемой вместе с частью привода перемещаемой вместе с объектом, узел фиксации контролируемых элементов объекта. установленный с возможностью фиксации 5 моментов их прохождения относительно отсчетной оси узла, формирователи коротких импульсов датчика и узла фиксации, интер- полятор шага дискретности датчика перемещений с блоком управления и
.0 последовательно соединенные блок буферной памяти, вычислитель и регистратор. В качестве примеров подобных устройств можно привести компаратор для абсолютных измерений штриховых линейных мер, в
5 котором в роли датчика выступает интерферометр, основное зеркало которого размещается на подвижной каретке с измеряемой штриховой мерой, или растровое сопряжение, а прохождение контролируемых штри0 хов фиксируется фотоэлектрическим микроскопом; устройство для измерения углов многогранных призм, в котором в качестве датчика используется кольцевой лазер, который вращается вместе с поверяемой
5 многогранной призмой, а прохождение нормалями к граням призмы определенного направления фиксируется фотоэлектдическим автоколлиматором. В указанных устройст- . вах интерполяторы шага дискретности дат0 чика перемещений применяются с мелью повышения точности измерений и содержит в своем составе электронные схемы фиксации характерных точек первичного выходного сигнала датчика или расщепители его
5 фаз и т.п.
Недостатком известных интерполято- ров является относительно невысокая равномерность расстановки точек интерполирования (неравномерность деле0 ния первичного шага дискретности), что ограничивает повышение точности измерения.
Целью изобретения является повышение точности измерения длин и углов пу5 тем повышения равномерности расстановки точек деления периода при интерполировании шага дискретности датчика перемещений.
Цель в предлагаемом устройстве дости0 гается за счет того, что устройство для измерения длин или углов, содержащее привод для перемещения объекта в направлении линии измерения, датчик линейных или угловых перемещений, чувствительный эле5 мент которого связан с подвижной частью привода, перемещаемой вместе с объектом, узел фиксации контролируемых элементов объекта, установленный с возможностью фиксации моментов их прохождения относительно отсчетной оси узла, первый и второй формирователи коротких импульсов датчика, входы которых соединены с выходом датчика, формирователь коротких импульсов узла фиксации, вход которого соединен с выходом узла фиксации, Интерпол ятор шага дискретности датчика перемещений с блоком управления и последовательно соединенные блок буферной памяти, вычислитель и регистратор, снабжено счетчиком целого числа шагов дискретности датчика перемещений, вход которого соединен с выходом одного из формирователей коротких импульсов датчика, а интерполятор выполнен в виде генератора образцовой частоты, блока определения временных эквивалентов текущих шагов дискретности датчика перемещений, первый, второй, и третий входы которого соединены соответственно с выходами генератора образцовой частоты и фор- мироватеЛей коротких импульсов датчика, и блока определения временных эквивалентов дробных частей шагов дискретности датчика перемещений, первый, второй и третий входы которого соединены соответственно с выходами генератора образцовой частоты, одного из формирователей коротких импульсов датчика и формирователя ко- . ротких импульсов устройства фиксации, первый и второй выходы соединены соответственно с входами блока управления, управляющий вход которого соединен с одноименным выходом блока буфе рной памяти, выход соединен с управляющими входами блока определения временных эквивалентов текущих шагов дискретности датчика перемещений и блока буферной памяти, информационные входы которого со единены соответственно с одноименными выходами блоков определения временных эквивалентов и счетчика целого числа шагов дискретности датчика перемещений, блок определения временных эквивалентов текущих шагов дискретности датчика перемещений выполнен в виде двух счетчиков импульсов, выходы которых являются информационными выходами блока, четырех элементов И, выходы первого и третьего из которых соединены соответственно со счетными входами счетчиков импульсов, а выхог ды второго и четвертого соединены соответственно с входами Установка О и тех же счетчиков, и триггера со счетным входом, один из выходов которого соединен с вторыми входами первого и четвертого элементов И, другой выход-с вторыми входами второго и третьего элементов И, первые входы первого и третьего элементов И объединены и образуют первый вход блока, первые входы второго и четвертого элементов И также объединены и образуют второй вход блока, счетный вход триггера является третьим входом блока, а третьи входы четырех элементов И объединены и образуют его
управляющий вход, а блок определения временных эквивалентов дробных частей шагов дискретности датчика перемещений выполнен в виде триггера с раздельными входами, элемента ИЛИ, выход которого со0 единены с первым входом триггера, а первый вход является вторым входом блока, двух формирователей импульсов, двух элементов И и счетчика импульсов, выход которого является информационным выходом блока,
0 с выходом триггера, .второй вход является, первым входом блока, выход соединен со счетным входом счетчика импульсов, вход первого формирователя импульсов соединен с вторым входом элемента ИЛИ и с
5 входом Установка О счетчика импульсов и является первым выходом блока, вход второго формирователя импульсов соединён с выходом триггера, а выход является вторым . выходом блока.
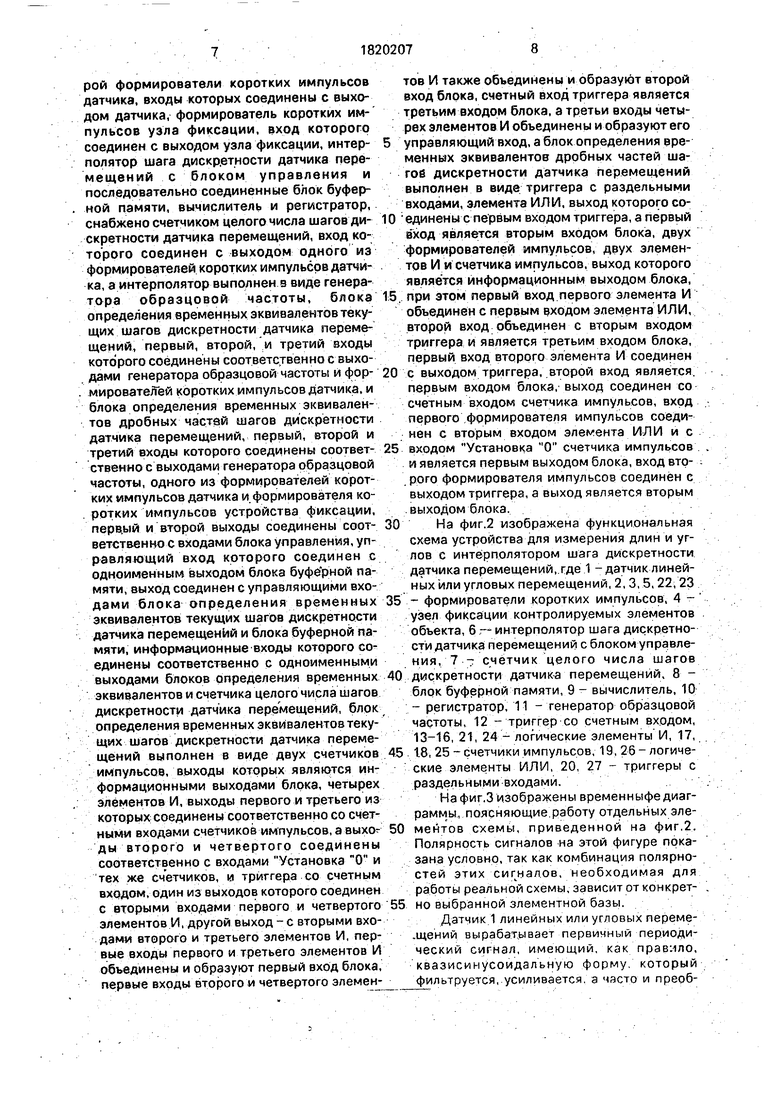
0 На фиг.2 изображена функциональная схема устройства для измерения длин и углов с интёрполятором шага дискретности датчика перемещений, где 1 -датчиклинейных или угловых перемещений, 2, 3,5,22,23
5 - формирователи коротких импульсов, 4 - узел фиксации контролируемых элементов объекта, б ,- интерполятор шага дискретности датчика перемещений с блоком управления, 7 - счётчик целого числа шагов
0 дискретности датчика перемещений, 8 - блок буферной памяти, 9 - вычислитель, 10 - регистратор, 11 - генератор образцовой частоты, 12 - триггер со счетным входом, 13-16, 21, 24 - логические элементы И, 17,
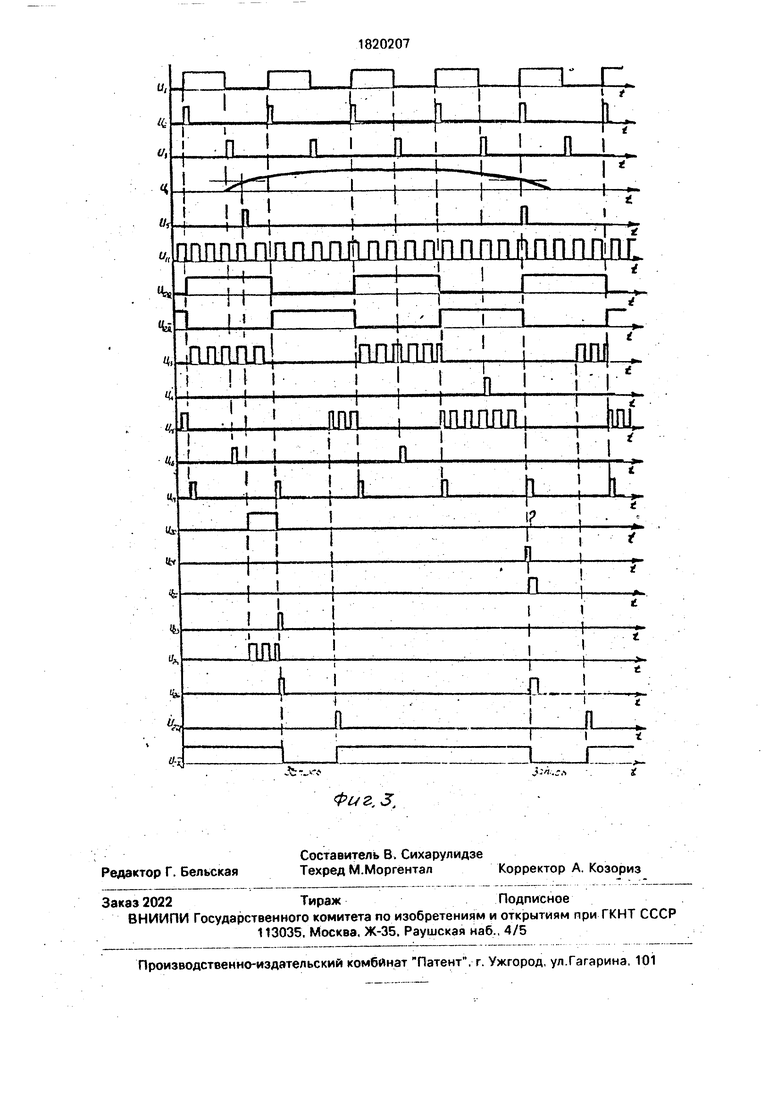
На фиг.З изображены временныфе диаграммы, поясняющие.работу отдельных эле0 ментов схемы, приведенной на фиг.2. Полярность сигналов на этой фигуре показана условно, так как комбинация полярно- стей этих сигналов, необходимая для работы реальной схемы, зависит отконкрет5 но выбранной элементной базы.
Датчик 1 линейных или угловых переме- „щений вырабатывает первичный периодический сигнал, имеющий, как правило, квазисинусоидальную форму, который фильтруется,.усиливается, а часто и преобразуется в прямоугольную форму. Период этого сигнала соответствует единичному линейному или угловому перемещению, т.е. шагу дискретности датчика 1.
Формирователи 2 и 3 коротких импуль- 5 сов вырабатывают, периодические последовательности импульсов, передние фронты которых фиксируют характерные точки первичного сигнала датчика 1, например точки перехода сигнала через ноль соответствено 10 на его положительных и отрицательных фронтах.
Узел 4 фиксации контролируемых эде- метов объекта вырабатывает в соответствующие моменты времени импульсные 15 сигналы, обычно имеющие колоколообраз- ную форму, которые фильтруются и усиливаются. Формирователь 5 вырабатывает импульсы, фронты которых фиксируют временные положения импульсных сигналов 20 узла 4. Импульсы формирователя 5 могут быть привязаны, например, к передним (задним) фронтам, обоим фронтам или к вершине (максимуму или минимуму) первичного выходного сигнала узла 4.25
Интерполятор 6 шага дискретности датчика перемеще ний с блоком управления обеспечивает накопление и передачу в блок
8 буферной памяти информации, позволяк - щей определить дробную часть количества 30 шагов дискретности датчика перемещений, укладывающихся в контролируемой координате. Входы интерполятора 6 соединены с выходами формирователей 2,3,5 и управляющим выходом блока 8 буферной памяти, 35 нформационные выходы интерполятора б соединены с информационными входами блока 8, а управляющий выход интерполято- . ра - с входом разрешениля записи информации блока 8.40
В счетчике 7 целого числа шагов дискретности датчика перемещений буществля- ется счет импульсов формирователя 2 и тем самым фиксируется текущее значение координаты перемещения чувствительного эле- 45 мента датчика перемещений, выражение в количестве шагов его дискретности. Счетный вход счетчика 7 соединен с выходом формирователя 2, а его информационные выходы -с информационными входами бло- 50 ка8. .-.. - , : - ,
Блок 8 буферной памяти предназначен ля записи и хранения информации с интерполятора 6 .и счетчика 7 о дробной и целой частях координат каждого из контролируе- 55 мых элементов объекта измерения, а также ля выдачи этой информации в вычислитель
9 после завершения процеса измерения/ Вычислитель 9 предназначен для расчета по формулам (1).и (2) искомых длин «углов.
Регистратор 10 производит регистра- цию измеренных значений, полученных после обработки в вычислителе 9, на бумажном носителе, цифровом табло или на дисплее. В качестве устройств 9 и 10 может быть применена стандартная ЭВМ с соответствующей периферией.
Интерполятор 6 шага дискретности датчика перемещений с блоком управления б содержит генератор 11 образцовой частоты, блок определения временных эквивалентов текущих шагов дискретности датчика 1 перемещений, содержащий триггер 12 со счетным вводом, логические элементы И 13-16 и счетчики 17 и 18 импульсов, блок определения временного эквивалента дробной части шага дискретности, содержащий логический элемент ИЛИ 19, триггер с раздельными входами 20, логический элемент И 21, формирователи 22 и 23 коротких импульсов, логический элемент И 24 и счетчик 25 импульсов, а также схему управления, содержащую логический элемент ИЛИ 26 и триггер 27 с раздельными входами.
Генератор 11 образцовой частоты вырабатывает стабильную по часоте последовательность импульсов, частота повторения которых превышает частоту повторения им- пульсов формирователя 2 в чисто раз, равное количеству точек интерполирования внутри шага дискретности датчика. Например, датчик линейных перемещений имезт шаг дискретности 1 мкм, скорость движения его чувствительного элемента (всегда задана заранее) равна 1 мм/с, требуется получить дискретность отсчета перемещений 0,01 мкм. В этом случае частота повторения импульсов формирователя 2 равна мм/с: 1 мкм 1 кГц, а число точек интерполирования внутри шага дискретности 1 -мкм: 0,01 мкм 100. Поэтому частоту повторения импульсов генератора 11 следует выбрать равной fit-100 2 100 кГц. Генератор 11 может быть выполнен, например, из задающего генератора, стабилизированного кварцем, набора делителей частоты, переключаемых перед началом работы в зависимости от требуемой величины выходной частоты, определяемой условиями измерений. Выход генератора 1J соединен с одними из входов логических элементов И 13,15 и 24. На вторые входы элементов И 13 и t5 подключены соответственно прямой и инверсный выходы триггера 12. Эти же выходы триггера соединены с одним из входов элементов И 14 м 16, вторые входы последних соединены с выходом формирователя 3. Выходы логических злементов И 13 и 15 соединены соответственно со счетными входами счетчиком, 17 и 18 импульсов, а выходы элементов И 14 и 16 - с входами Установка О этих счетчиков..
Выход формирователя 2 соединен также с одним.из входов логического элемента ИЛИ 19, выход которого соединен с одним из входов триггера 20. С другим входом этого триггера соединен выход формирователя 5, Выходы формирователей 2 и 5 соединены также с входами логического элемента И 21, выход которого соединен с входом формирователя 22. Этот формирователь вырабатывает импульс определенной длительности при полном или частичном совпадении импульсов с формирователей 2 и 5, Выход формирователя 22 соединен с входами элементов ИЛИ 19 и 26 и входами Установка О счетчика 25 импульсов, Один из входов триггера 20 соединен с входом логического элемента И 24, а также с входом формирователя 23. Последний вырабатывает импульс определенной длительности при переходе триггера 20 из одного определенного состояния в другое (на схеме из состо- яния О в состояние 1). Выход формирователя 23 соединен с входом элемента ИЛИ 26. Выход элемента ИЛИ 26 соединен с одним из входов триггера 27, выход этого триггера соединен с третьими входами логических элементов И 13-16 и управляющим входом блока 8 буферной памяти, а управляющий выход последнего - с вторым входом триггера 27. Триггер 27 осуществляет запрет прохода импульсов от генератора 11 на счетные входы, а импульсов от формирователя 3 на входы Установка О .счетчиков 17 и 18 после появления каждого импульса на выходе формирователя 5 и дает команду на запись информации в блок 8. После забора всей информации блок 8 возвращает триггер в исходное состояние. Информационные выходы счетчиков 17,18 и 25 соединены с информационными входами блока 8.
В зависимости от выбранной элементной базы может понадобиться увязка описанных элементов по полярности -- применение в отдельных местах схемы на фиг.2 инверторов, на схеме не показанных. Не показана на схеме как общеизвестная также цепь установки элементов схемы на фиг.2 в исходное состояние перед началом измерений. В варианте выполнения устройства сигнал начала отсчета, устанавливающий элементы схемы на фиг,2 в исходное состояние и разрешающий начал о работы устройства, может вырабатываться специальным датчиком, фиксирующим прохождение подвижной системой определенной точки в пространстве (например, зазор между неподвижной парой светодиод-фотодиод
перекрывается непрозрачной пластиной, связанной с подвижной частью).
Устройство для измерения длин и углов - работает следующим образом.
По команде оператора объект измерения вместе с чувствительным элементом датчика 1 приводится в равномерное (по возможности) поступательное или вращательное движение в зависимости от того,
0 какая величина измеряется: длина или угол. При этом на выходе датчика 1 появляется периодический сигнал, несущий информацию о величине перемещения объекта измерения. Этот сигнал преобразуется
5 формирователями 2 и 3 в две последовательности коротких импульсов с периодом повторения как у датчика 1 .сдвинутых отнот сительно друг друга по фазе на 180°. Импульсы с формирователя 2 поступают на
0 счетный вход триггера 1.2. который начинает периодически переключаться из одного положения в другое, в результате чего на его выходах образуются два противофазных напряжения прямоугольной формы. Эти на5 пряжения подаются на один из входов логических элементов И соответственно 13 и 15. При этом с выхода триггера 27 на другие входы этих элементов попадается напряжение, не препятствующее их откры0 тому состоянию. образом, триггер 12 обеспечивает проход импульсов генератора 11 на счетные входы счетчиков 17 и 18 импульсов через логические элементы И 13 и 15 попеременно, по мере переключения
5 триггера 12, например, на счетчик 17 в нечетные периоды сигнала с формирователя 2, а на счетчик 18 в его четные периоды. При этом на счетчиках 17 и 18 накапливаются количества импульсов, представляющие со0 бой временные эквиваленты соответствующих периодов сигнала с датчика 1 (формирователя 2). Сброс счетчиков 17 и 18 в исходное состояние обеспечивается также попеременно импульсами с формирователя
5 3, поступающими на их входы Установка О, в зависимости от разрешающих потен- циалов с выходов триггеров 12 и 27 на входах логических элементов И 14 и 16.
Импульсы с формирователя 2 через эле0 мент ИЛИ 19 поступают также на один из
: входов триггера 20, подтверждая каждый
раз его состояние (на фиг.2 состояние 1).
По мере движения объекта измерения при
прохождении относительно узла 4 фиксации
5 контролируемых элементов объекта (штрихов шкалы или лимба, граней угловой меры и т.п) на выходе формирователя 5 начинают возникать короткие импульсы, причем между каждой парой этих импульсов, как правило, возникает не менее нескольких
импульсов с формирователей 2 и 3, поскольку шаг дискретности датчика 1 в несколько раз меньше угловой или линейной цены импульса с узла 4 фиксации и во много раз меньше цены между смежными импульсами узла4.
Каждый из импульсов с формирователя 5, поступая на другой вход триггера 20, вызывает его опрокидывание (состояние О). Последующий импульс с формирователя 2 вновь возвращает триггер 20 в исходное состояние. При этом на выходе триггера 20 возникает строб-импульс, длительность которого равна интервалу времени между импульсов с формирователя 5 и следующим за ним импульсом с формирователя 2. Этот
импульс разрешает проход счетных импульсов с генератора 11 через логический эле- мент И 24 на счетчик 25 импульсов. Таким образом, на счетчикэ 25 накапливается количество импульсов, представляющее собой временной эквивалент дробной части шага дискретности датчика 1 соответствую-. щего импульсу с формирователя 5.
При полнбм или частичном совпадении .импульсов с формирователей 2 и 5 на выходе элемента И 21 появляется импульс, длительность которого может варьировать в зависимости о г степени перекрытия входных импульсов. Этот импульс доводится до определенной длительности формирователем 22 и устанавливает счетчик 25 в нулевое
. состояние, т.е. дробная часть при.этом рав на нулю. Поскольку в рассмотренном случае .на оба входа триггера 20 поступают импульсы, по их окончании его состояние является неопределенным. Для исключения этого импульс с формирователя 22 через логический элемент ИЛИ 19 также поступает на тот же
триггер 20, что и импульсы с формирователя
В предыдущем случае ло окончании строб-импульса с триггера 20 формйоова- тель 2 вырабатывает короткий импульс, который, как и импульс с формирователя 22,: поступает на элемент ИЛИ 26, а с его выхода на один из входов триггера 27, вызывая его срабатывание. При этом потенциал на его выходе запирает логические элементы И ; 13-16 и дает сигнал на блок 8 буферной памяти, разрешающий запись в него информации со счетчиков 17, 18 и 25, а также со счетчика 7 целого числа шагов дискретности датчика перемещений, который подсчитывает количество импульсов с формирователя 2, начиная с момента начала отсчета координат, т.е. фиксирует текущее значение целого количества шагов дискретности. .
Таким образом, при появлении каждого, импульса с формирователя 5 в блоке 8 оказывается записанной информация, необходимая для расчета координат по формуле (1). При этом на одном из счетчиков 17 или 18 оказывается записанным О. Он во внима5 ние не принимается или берется сумма значений обоих счетчиков/ По окончании записи .информации блок 8 выдает сигнал на второй вход триггера 27 и последний возвращается в исходное положение.
0 После набора информации, соответст- вующей всем точкам контроля (их, как правило, бывает несколько, например штрихи штриховой линейной меры, углы многогранной призмы и т.п.), в вычислитель 9 произ5 годится считывание информации с блока 8 буферной памяти и вычислитель рассчитывает координаты по формуле (1). а также их разности по формуле (2), так как обычно требуется определять не абсолютные коор0 динаты точек в пространстве относительно начальной точки, а именно их разности, например5 при измерении интервалов между штрихами штриховых мер, углов многогран ных призм и т.п. Результаты измерений фик5 сируются регистратором 10.
. Возможны варианты выполнения устройства для измерения длин и углов в зависимости от ряда параметров, влияющих на . быстродействие средств набора и записи
0 информации, таких как скорость проведения измерений, количество контролируемых точек, абсолютные значения измеряемых величин, соотношение шагов
дискретности датчика и интерлолятора. 5 в рассмотренной на фиг.2 схеме время . для переписи информации со счетчика 7 в блок 8 буферной памяти не должно превосходить периода выходного сигнала датчика.
1, затем может быть переписана информа- 0 ция со счетчиков 17, 18 и 25. Это время ограничено лишь минимально возможным временем прихода следующего импульса с формирователя 5. Для еще более высокого быстродействия проведения измерений на 5 выходах счетчика 7 могут быть применены элементы динамической памяти, запоминающие информацию неуказанное выше время,, в то время как счетчик 7 продолжает счет. /.- . . -. . 0 При относительно низких скоростях измерения и малых величинах разрядностей счетчиков, в первую очередь счетчика.7, когда время переписи с них информации в блок : 8 не превосходит половины периода выход- 5 ного сигнала датчика 1, возможно видоизменение схемы на фиг.2: на R-вход триггера 27 можно подключить выход формирователя 3, выход триггера 27 отсоединить от логических, элементов И 14 и 1.6, а вместо последних использовать по два входа Установка О, соединенные по схеме И, которые имеются у большинства типов счетчиков.
Формула изобретения
5 датчика перемещений, первый, второй и третий входы которого соединены соответственно с выходами генератора образцовой частоты и формирователей коротких импульсов датчика, и блока определения вре10 менных эквивалентов дробных частей шагов дискретности датчика перемещений, первый, второй и третий входы которого соединены соответственно с выходами генератора образцовой частоты, одного из
15 формирователей коротких импульсов датчика и формирователя коротких импульсов устройства фиксации, первый и второй выходы соединены соответственно с входами блока управления, управляющий вход ко0 торого соединен с одноименным выходом блока буферной памяти, выход соединен с управляющими входами блока определения временных эквивалентов текущих шагов дискретности датчика перемещений и блока
5 буферной памяти, информационные входы которого соединены соответственно е одноименными выходами блоков определения временных эквивалентов и счетчика целого цисла шагов дискретности датчика переме0 щений,
5 счётчиков импульсов, выходы которых являются информационными выходами блока, четырех .элементов И, выходы первого и третьего из которых соединены соответственно со счетными входами счетчиков им40 пульсов, а выходы второго и четвертого - соответственно с входами Установка О тех же счетчиков/и триггера со счетным входом, один из выходов которого соединен с вторыми входами первого и четвертого
45 элементов И, другой выход - с вторыми вхо- дадами второго и третьего элементов И, первые входы первого и третьего элементов И объединены и образуют первый вход блока, первые входы второго и четвертого эле50 ментов И также объединены и образуют второй вход блока, счетный вход триггера является третьим входом блока, а третьи входы четырех элементов И объединены и образуют его управляющий вход.
1
0
второй вход является первым входом блока, выход соединен со счетным входом счетчика импульсов, вход первого формирователя импульсов соединен с выходом первого элемента И , выход- с вторым входом элемента ИЛИ и с входом Установка О счетчика импульсов и является первым выходом блока, вход второго формирователя импульсов соединен с выходом i риггерэ, а выход является вторым выходом блока.
fi+ti №
Щиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Федотов А.И | |||
| Технология автоматизированного нанесения штрихов и знаков | |||
| - М.: Машиностроение, 1977, с.259 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гелашвили Н.В., Биркадзе Ш.В., Ку- рятов В.Н., Орлов М.В | |||
| Автоматизированная углоизмерительная система на базе кольцевого лазера | |||
| Измерительная техника, 1988 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пивоварова Л.Н.; Куликов Н.И | |||
| Фотоэлектрические преобразователи для измерения угловых и линейных перемещений | |||
| Оптико-механическая промышленность, 1974 | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
